Bilevel Optimization for Real-Time Control with Application to Locomotion Gait Generation
作者: Zachary Olkin, Aaron D. Ames
分类: eess.SY, cs.RO
发布日期: 2024-09-18
备注: Accepted to CDC 2024
💡 一句话要点
提出基于双层优化的实时控制算法,用于四足机器人步态生成,提升抗扰动性和优化性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 双层优化 模型预测控制 实时控制 足式机器人 步态生成
📋 核心要点
- 模型预测控制(MPC)在实时控制中面临计算瓶颈,难以快速求解复杂的非线性系统控制问题。
- 论文提出双层优化框架,高层优化器调整低层MPC的参数,实现控制输入和轨迹的实时生成。
- 通过四足机器人仿真验证,该算法在抗扰动性、优化性和步态生成方面均有提升。
📝 摘要(中文)
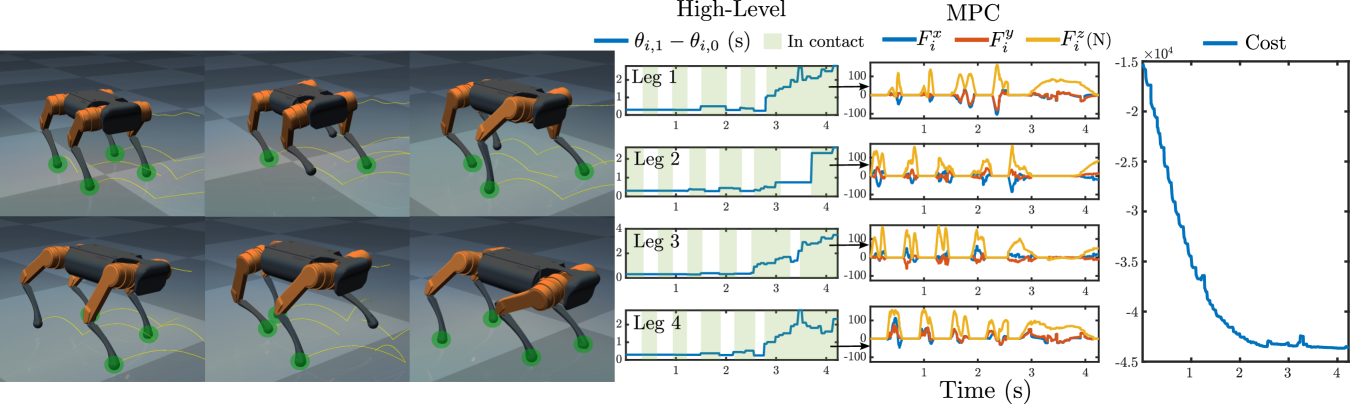
本文针对非线性实时系统(如足式机器人)控制中模型预测控制(MPC)求解速度慢的问题,提出了一种基于双层控制框架的解决方案。该框架中,“高层”优化程序修改“低层”MPC问题的控制器参数,从而生成控制输入和期望状态轨迹。本文提出了一种实时迭代双层程序的算法,并给出了其收敛性和稳定性改进的条件。通过将其应用于四足机器人,高层问题实时优化接触计划,仿真结果表明该算法能够提高抗扰动性和优化性,并产生新的步态。
🔬 方法详解
问题定义:论文旨在解决足式机器人等非线性系统在实时控制中,传统模型预测控制(MPC)计算量大、求解速度慢的问题。现有方法,如实时迭代,虽然能加速求解,但通常无法保证收敛到最优解,且对扰动的鲁棒性有限。
核心思路:论文的核心思路是将控制问题分解为双层优化结构。高层优化器负责调整低层MPC的参数,例如接触计划,从而影响低层MPC的控制行为。通过实时迭代更新高层优化器的参数,可以在保证计算效率的同时,逐步优化控制策略。这种分层结构允许在高层进行更抽象的决策,而低层则负责具体的控制执行。
技术框架:整体框架包含两个主要模块:高层优化器和低层MPC。高层优化器接收来自低层MPC的状态信息,并根据预设的目标函数(例如,能量效率、稳定性)优化控制器参数(例如,接触序列)。优化后的参数传递给低层MPC,MPC根据这些参数生成控制输入和期望状态轨迹。整个过程通过实时迭代的方式进行,即在每个控制周期内,高层和低层优化器都进行有限次数的迭代。
关键创新:该方法最重要的创新在于将双层优化框架应用于实时控制,并提出了一种实时迭代算法来求解该双层优化问题。与传统的单层MPC相比,该方法能够在高层进行更高级的决策,从而实现更复杂的控制策略。此外,论文还提供了算法收敛性和稳定性改进的条件,为算法的实际应用提供了理论保障。
关键设计:高层优化器的目标函数需要根据具体的应用场景进行设计,例如,可以考虑能量消耗、稳定性裕度等因素。低层MPC的设计需要保证控制器的稳定性和鲁棒性。实时迭代的次数需要根据计算资源和控制性能进行权衡。论文中,高层优化器优化的是四足机器人的接触计划,这直接影响了机器人的步态。具体的优化算法(例如,梯度下降法)和参数设置(例如,学习率)需要根据实际情况进行调整。
🖼️ 关键图片


📊 实验亮点
论文通过四足机器人仿真实验验证了所提出算法的有效性。实验结果表明,该算法能够显著提高机器人的抗扰动能力和优化性能,并能够生成新的步态。具体而言,在受到外部扰动时,采用该算法的机器人能够更快地恢复稳定状态,并且能够以更低的能量消耗完成运动任务。此外,该算法还能够生成一些传统的MPC方法难以实现的步态,例如跳跃步态。
🎯 应用场景
该研究成果可应用于各种足式机器人,例如四足机器人、双足机器人等,使其能够在复杂环境中实现更稳定、高效的运动控制。此外,该方法还可以推广到其他需要实时控制的非线性系统,例如自动驾驶、无人机等,具有广泛的应用前景和实际价值。未来的研究可以进一步探索更复杂的双层优化结构和更高效的优化算法,以提高控制性能和鲁棒性。
📄 摘要(原文)
Model Predictive Control (MPC) is a common tool for the control of nonlinear, real-world systems, such as legged robots. However, solving MPC quickly enough to enable its use in real-time is often challenging. One common solution is given by real-time iterations, which does not solve the MPC problem to convergence, but rather close enough to give an approximate solution. In this paper, we extend this idea to a bilevel control framework where a "high-level" optimization program modifies a controller parameter of a "low-level" MPC problem which generates the control inputs and desired state trajectory. We propose an algorithm to iterate on this bilevel program in real-time and provide conditions for its convergence and improvements in stability. We then demonstrate the efficacy of this algorithm by applying it to a quadrupedal robot where the high-level problem optimizes a contact schedule in real-time. We show through simulation that the algorithm can yield improvements in disturbance rejection and optimality, while creating qualitatively new gaits.