Bridging Autoencoders and Dynamic Mode Decomposition for Reduced-order Modeling and Control of PDEs
作者: Priyabrata Saha, Saibal Mukhopadhyay
分类: eess.SY, cs.LG, math.OC
发布日期: 2024-09-09
备注: 8 pages, 5 figures. Accepted to IEEE Conference on Decision and Control (CDC 2024)
💡 一句话要点
结合自编码器与动态模态分解,用于偏微分方程降阶建模与控制
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 降阶建模 动态模态分解 自编码器 偏微分方程 深度学习 系统控制 反应扩散系统
📋 核心要点
- 偏微分方程驱动的复杂系统建模与控制面临高计算复杂度挑战,需要有效的降阶模型。
- 论文提出一种结合自编码器和动态模态分解的降阶建模方法,并扩展到非线性深度自编码框架。
- 通过反应扩散系统的实验验证了该方法在建模和控制方面的有效性,展示了其应用潜力。
📝 摘要(中文)
本文探索了一种深度自编码学习方法,用于偏微分方程(PDEs)驱动的复杂时空动力系统的降阶建模与控制。为了提高计算效率,对这类系统进行建模和控制通常需要降维技术来构建低阶模型。首先,我们从理论上证明,学习线性自编码降阶模型的一个优化目标可以被构建,从而产生与使用带控制的动态模态分解算法得到的结果非常相似的解。然后,我们将这种线性自编码架构扩展到深度自编码框架,从而能够开发非线性降阶模型。此外,我们利用学习到的降阶模型,使用稳定性约束的深度神经网络来设计控制器。最后,通过反应扩散系统的数值实验验证了该方法在建模和控制方面的有效性。
🔬 方法详解
问题定义:论文旨在解决偏微分方程(PDEs)描述的复杂时空动力系统的建模和控制问题。现有方法,如直接求解高维PDEs,计算成本高昂。传统的降阶方法,如动态模态分解(DMD),在处理非线性系统时表现受限。因此,需要一种能够有效处理非线性、降低计算复杂度的建模与控制方法。
核心思路:论文的核心思路是将自编码器(Autoencoder)与动态模态分解(DMD)相结合,构建降阶模型。自编码器用于学习数据的低维表示,DMD则用于提取系统的动态特征。通过这种结合,可以有效地降低模型的维度,同时保留系统的关键动态信息。此外,通过引入深度自编码器,可以处理非线性系统。
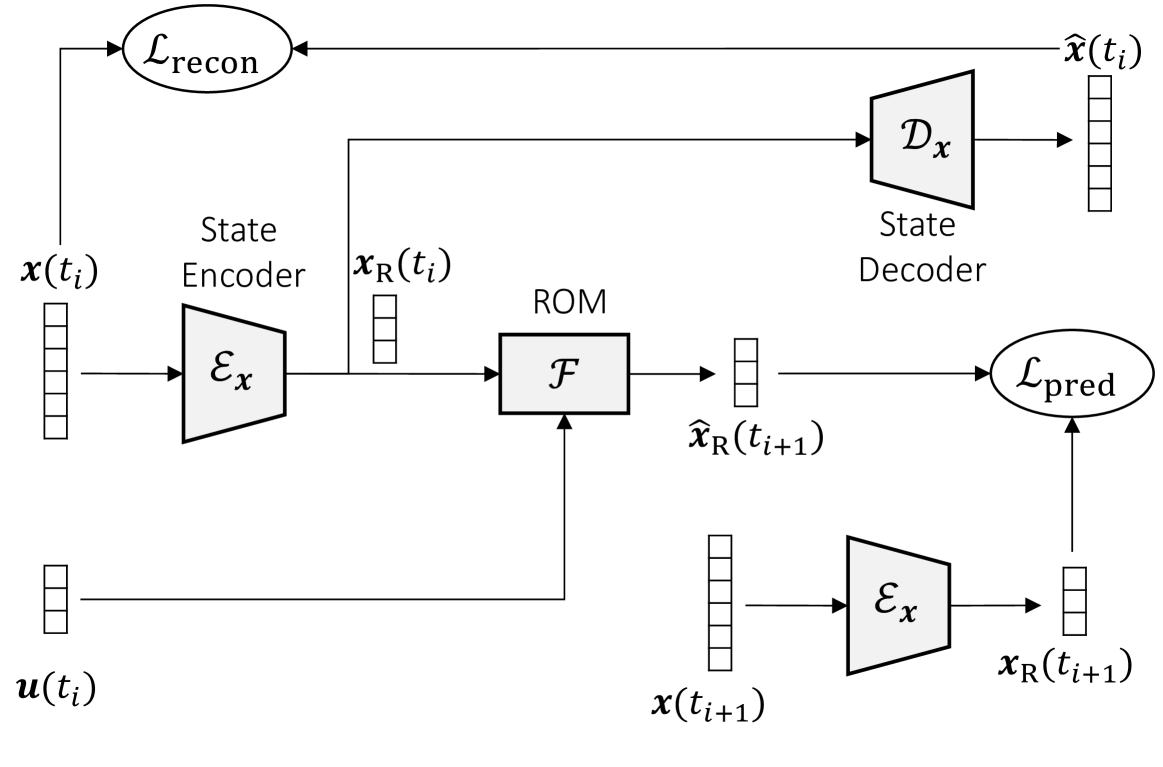
技术框架:整体框架包含以下几个主要步骤:1) 使用自编码器学习高维数据的低维表示(编码器);2) 在低维空间中,利用动态模态分解(或其变体)提取系统的动态特征;3) 使用解码器将低维表示映射回原始高维空间;4) 利用学习到的降阶模型设计控制器,例如使用稳定性约束的深度神经网络。
关键创新:论文的关键创新在于:1) 将自编码器与DMD相结合,构建降阶模型,充分利用了自编码器的非线性映射能力和DMD的动态特征提取能力;2) 提出了基于稳定性约束的深度神经网络控制器设计方法,保证了闭环系统的稳定性;3) 从理论上分析了线性自编码器与DMD之间的联系,为方法的有效性提供了理论支撑。
关键设计:在线性自编码器部分,优化目标被设计为最小化重构误差,同时考虑控制输入的影响。在深度自编码器部分,使用了多层神经网络来学习非线性映射。在控制器设计中,稳定性约束被嵌入到深度神经网络的损失函数中,以确保闭环系统的稳定性。具体的网络结构和参数设置根据具体的PDE系统进行调整。
🖼️ 关键图片


📊 实验亮点
论文通过反应扩散系统的数值实验验证了所提出方法的有效性。实验结果表明,该方法能够有效地降低模型的维度,同时保持较高的建模精度。此外,基于稳定性约束的深度神经网络控制器能够有效地控制系统,并保证闭环系统的稳定性。具体的性能数据(如建模误差、控制精度等)在论文中进行了详细的展示和分析。
🎯 应用场景
该研究成果可应用于各种由偏微分方程描述的复杂系统,例如流体力学、化学反应、生物系统等。通过构建降阶模型,可以显著降低计算成本,实现对这些系统的实时控制和优化。未来,该方法有望在航空航天、能源、环境等领域发挥重要作用。
📄 摘要(原文)
Modeling and controlling complex spatiotemporal dynamical systems driven by partial differential equations (PDEs) often necessitate dimensionality reduction techniques to construct lower-order models for computational efficiency. This paper explores a deep autoencoding learning method for reduced-order modeling and control of dynamical systems governed by spatiotemporal PDEs. We first analytically show that an optimization objective for learning a linear autoencoding reduced-order model can be formulated to yield a solution closely resembling the result obtained through the dynamic mode decomposition with control algorithm. We then extend this linear autoencoding architecture to a deep autoencoding framework, enabling the development of a nonlinear reduced-order model. Furthermore, we leverage the learned reduced-order model to design controllers using stability-constrained deep neural networks. Numerical experiments are presented to validate the efficacy of our approach in both modeling and control using the example of a reaction-diffusion system.