Analyzing Errors in Controlled Turret System
作者: Matthew Karlson, Heng Ban, Daniel G. Cole, Mai Abdelhakim, Jennifer Forsythe, John T. Fitzgibbons
分类: eess.SY
发布日期: 2024-08-29
备注: 29 pages, 15 figures
💡 一句话要点
分析控制炮塔系统中的瞄准误差,研究参数误差和目标运动对精度的影响
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 控制系统 炮塔系统 瞄准误差 PID控制 模型预测控制 参数估计 目标跟踪 仿真分析
📋 核心要点
- 现有控制武器系统在实际应用中,易受系统参数估计误差和目标测量不确定性的影响,导致瞄准精度下降。
- 论文通过建立炮塔数学模型,设计PID和MPC控制器,并分析不同误差源对静止和移动目标瞄准精度的影响。
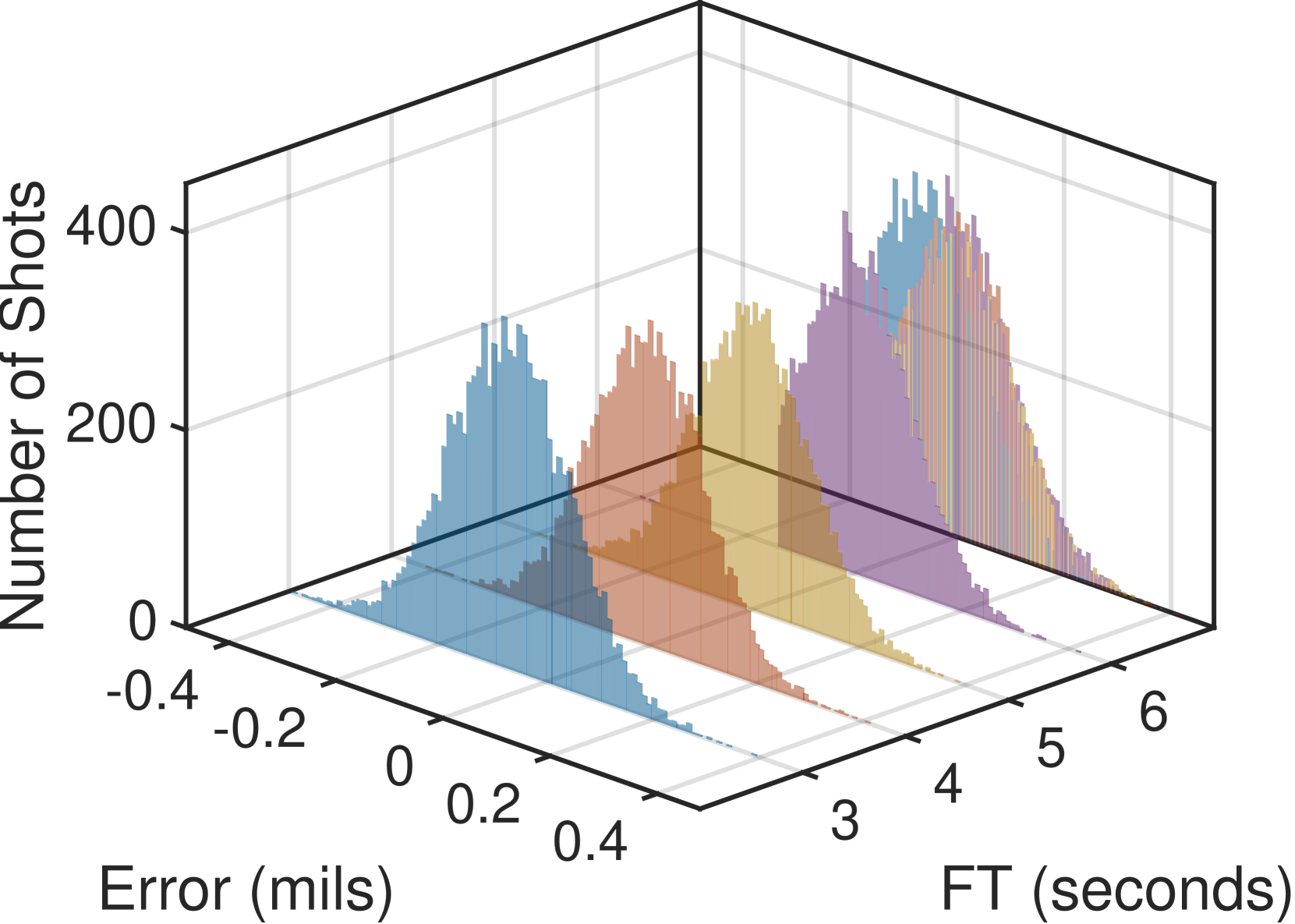
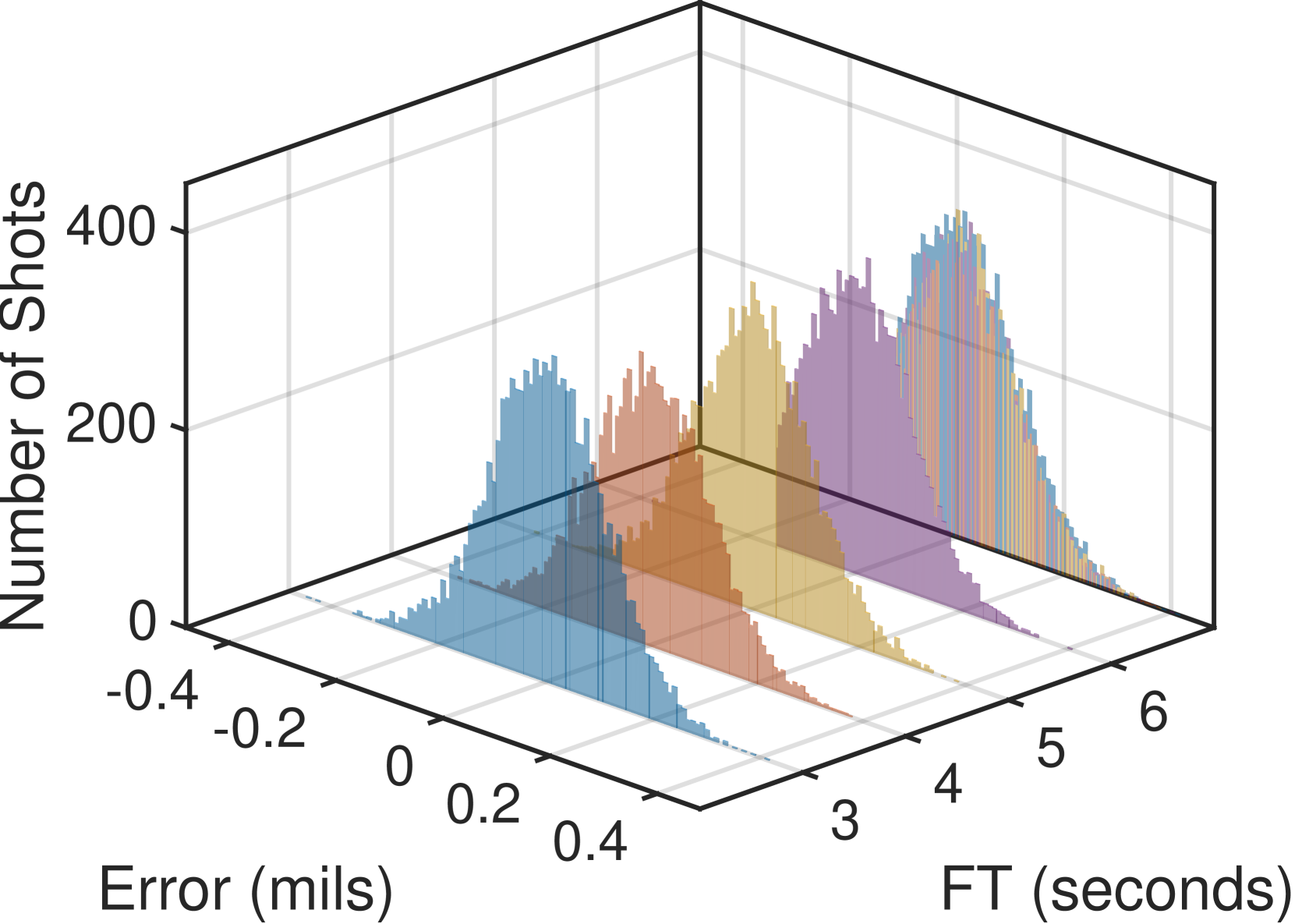
- 实验结果表明,惯性矩误差对炮塔运动影响更大,积分控制对移动目标至关重要,且更长的瞄准时间通常能提高精度。
📝 摘要(中文)
本文旨在分析给定目标位置输入下,控制武器系统中的瞄准误差。为了实现这一目标,我们分析了控制武器系统模型在不同误差源和射击时间下,对静止和移动目标的精度。首先,我们建立了炮塔的数学模型,并使用该模型设计了两个控制器:比例-积分-微分(PID)控制器和模型预测控制器(MPC),它们接收目标位置输入并在仿真中将炮塔移动到目标的质心。对于静止目标,我们分析了估计系统参数时的误差以及瞄准点测量的不确定性所产生的影响。结果表明,炮塔的运动对惯性矩的误差比对阻尼系数的误差更敏感,这可能导致对控制炮塔系统精度的不正确仿真。结果还支持以下假设:炮塔运动误差在炮塔运动较长距离时更大,并且在没有时间限制的情况下,等待更长时间射击可以提高精度;尽管这在战斗场景中可能并不总是可行的。此外,我们证明了积分控制分量对于移动目标场景中的高精度是必需的。
🔬 方法详解
问题定义:论文旨在解决控制炮塔系统在实际应用中,由于系统参数估计误差、目标测量不确定性以及目标运动等因素导致的瞄准精度下降问题。现有方法缺乏对这些误差源的系统性分析,难以指导控制器的设计和优化。
核心思路:论文的核心思路是建立炮塔的数学模型,并基于该模型设计控制器,然后通过仿真实验分析不同误差源对瞄准精度的影响。通过这种方式,可以识别出影响精度的关键因素,并为提高系统性能提供指导。
技术框架:论文的技术框架主要包括以下几个部分:1) 建立炮塔的数学模型,描述炮塔的运动学和动力学特性;2) 基于该模型设计PID和MPC两种控制器,实现对炮塔的精确控制;3) 通过仿真实验,分析系统参数估计误差、目标测量不确定性以及目标运动等因素对瞄准精度的影响;4) 对实验结果进行分析,识别出影响精度的关键因素,并提出改进建议。
关键创新:论文的关键创新在于对控制炮塔系统中误差源的系统性分析。通过仿真实验,论文揭示了惯性矩误差对炮塔运动的影响大于阻尼系数误差,并验证了积分控制分量对于移动目标场景的重要性。这些发现为控制器的设计和优化提供了重要的依据。
关键设计:论文的关键设计包括:1) 炮塔数学模型的建立,需要准确描述炮塔的运动学和动力学特性;2) PID和MPC控制器的设计,需要根据炮塔的特性进行参数调整,以实现最佳的控制效果;3) 仿真实验的设计,需要考虑各种误差源的影响,并设置合理的实验参数,以保证实验结果的可靠性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,炮塔运动对惯性矩的误差比对阻尼系数的误差更敏感,这表明在系统建模和仿真中需要更加关注惯性矩的准确性。此外,实验还验证了积分控制分量对于移动目标场景中的高精度是必需的,这为控制器的设计提供了重要的指导。在静止目标场景中,更长的瞄准时间通常能提高精度。
🎯 应用场景
该研究成果可应用于各种需要精确瞄准的控制武器系统,例如陆地、空中和海上防御系统。通过优化控制器设计和提高系统参数估计的准确性,可以显著提高武器系统的命中率和作战效能,降低误伤风险。此外,该研究方法也可推广到其他类型的控制系统中。
📄 摘要(原文)
The purpose of this paper is to characterize aiming errors in controlled weapon systems given target location as input. To achieve this objective, we analyze the accuracy of a controlled weapon system model for stationary and moving targets under different error sources and firing times. First, we develop a mathematical model of a gun turret and use it to design two controllers, a Proportional-Integral-Derivative controller and a Model Predictive controller, which accept the target location input and move the turret to the centroid of the target in simulations. For stationary targets, we analyze the impact of errors in estimating the system's parameters and uncertainty in the aim point measurement. Our results indicate that turret movement is more sensitive to errors in the moment of inertia than the damping coefficient, which could lead to incorrect simulations of controlled turret system accuracy. The results also support the hypothesis that turret movement errors are larger over longer distances of gun turret movement and, assuming no time constraints, accuracy improves the longer one waits to fire; though this may not always be practical in a combat scenario. Additionally, we demonstrate that the integral control component is needed for high accuracy in moving target scenarios.