Structural Optimization of Lightweight Bipedal Robot via SERL
作者: Yi Cheng, Chenxi Han, Yuheng Min, Linqi Ye, Houde Liu, Hang Liu
分类: eess.SY, cs.AI
发布日期: 2024-08-28
💡 一句话要点
提出SERL算法,优化轻量级双足机器人的结构参数设计。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 双足机器人 结构优化 强化学习 进化算法 机器人设计 轻量化 运动控制
📋 核心要点
- 传统双足机器人设计依赖人工经验,耗时费力,缺乏理论指导,难以在广阔设计空间内获得最优结果。
- SERL算法结合强化学习和进化算法,在多维设计空间中寻找最优参数组合,优化机器人结构。
- 实验表明,基于SERL算法设计的Wow Orin双足机器人,在能源效率和性能上优于主流机器人。
📝 摘要(中文)
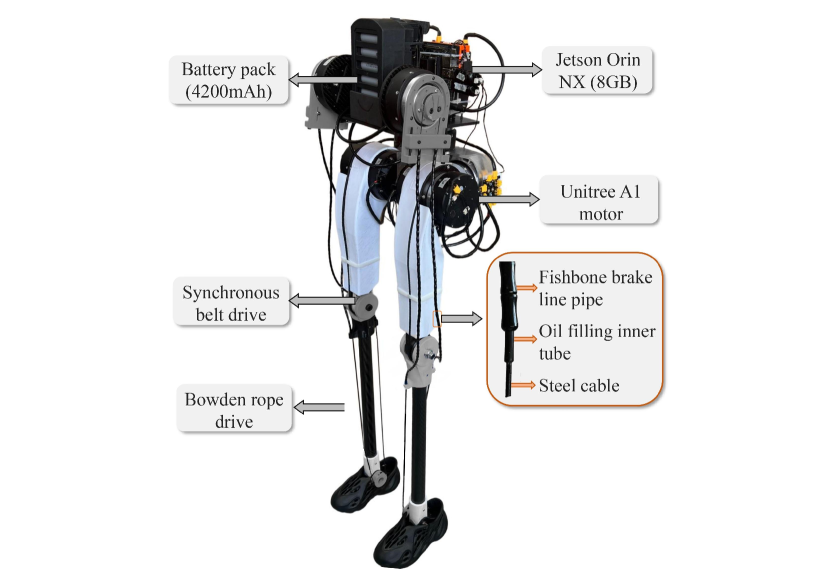
本文提出了一种名为SERL(Structure Evolution Reinforcement Learning)的算法,该算法结合了用于运动任务的强化学习和进化算法,旨在识别给定多维设计空间内的最佳参数组合。通过SERL算法,成功设计了一款名为Wow Orin的双足机器人,其最佳腿长是通过基于身体结构和电机扭矩的优化获得的。实验验证了SERL算法的有效性,该算法能够在指定的设计空间和任务条件下优化最佳结构。此外,为了评估我们设计的机器人与当前最先进机器人之间的性能差距,我们将Wow Orin与主流双足机器人Cassie和Unitree H1进行了比较。一系列实验结果表明Wow Orin具有出色的能源效率和性能,进一步验证了将SERL算法应用于实际设计的可行性。
🔬 方法详解
问题定义:双足机器人的结构设计是一个复杂问题,涉及众多结构参数。传统方法依赖人工经验,难以在庞大的设计空间中找到最优解,限制了机器人性能的充分发挥。现有方法缺乏理论指导,优化过程耗时且效率低下。
核心思路:本文的核心思路是将强化学习与进化算法相结合,利用强化学习在运动任务中的优势,以及进化算法在参数寻优方面的能力,共同搜索最优的机器人结构参数。通过这种方式,可以在给定的设计空间内,自动地找到能够最大化机器人性能的结构参数组合。
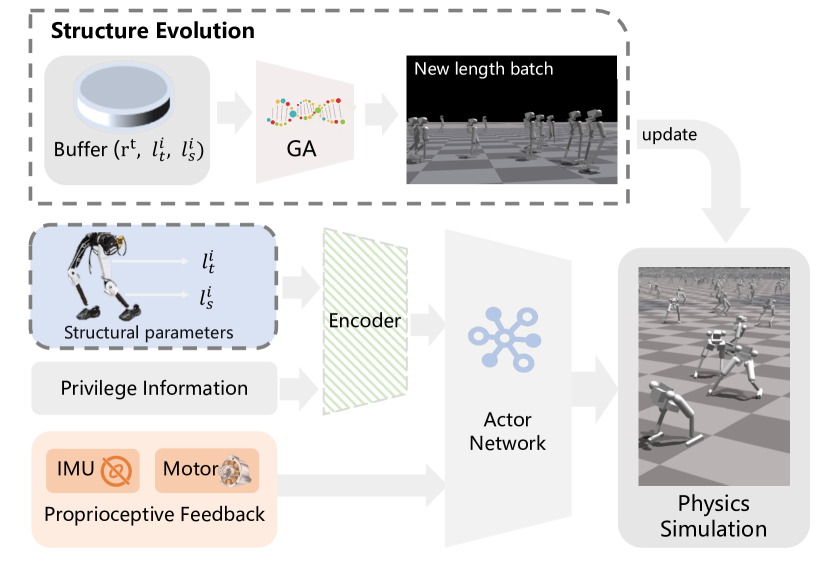
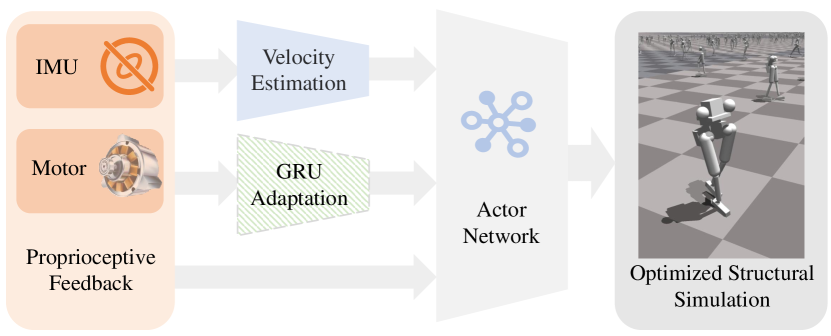
技术框架:SERL算法的整体框架包含以下几个主要模块:1) 结构参数空间定义:定义机器人结构参数的范围和约束;2) 强化学习运动控制器:使用强化学习训练一个能够控制机器人运动的控制器;3) 进化算法优化器:使用进化算法搜索最优的结构参数,并使用强化学习控制器评估每个结构参数组合的性能;4) 迭代优化:不断迭代进化算法和强化学习控制器,直到找到最优的结构参数。
关键创新:SERL算法的关键创新在于将强化学习和进化算法有机结合,利用各自的优势,实现了机器人结构参数的自动优化。与传统方法相比,SERL算法能够更有效地探索设计空间,找到更优的结构参数组合,从而提升机器人的性能。
关键设计:在SERL算法中,关键的设计包括:1) 结构参数的表示方式;2) 强化学习控制器的选择和训练;3) 进化算法的参数设置(如种群大小、交叉概率、变异概率);4) 性能评估指标的选择(如行走速度、能量效率)。此外,损失函数的设计也至关重要,需要综合考虑机器人的运动稳定性、能量消耗等因素。
🖼️ 关键图片
📊 实验亮点
实验结果表明,通过SERL算法设计的Wow Orin双足机器人在能源效率和运动性能方面均优于主流机器人Cassie和Unitree H1。具体数据未知,但强调了Wow Orin在能源效率和性能方面的优势,验证了SERL算法在实际机器人设计中的有效性。
🎯 应用场景
该研究成果可应用于各种双足机器人的结构优化设计,尤其是在轻量化和高性能方面有较高要求的场景,例如:搜救机器人、物流机器人、服务机器人等。通过SERL算法,可以快速设计出满足特定任务需求的机器人结构,降低研发成本,缩短研发周期,并提升机器人的整体性能。
📄 摘要(原文)
Designing a bipedal robot is a complex and challenging task, especially when dealing with a multitude of structural parameters. Traditional design methods often rely on human intuition and experience. However, such approaches are time-consuming, labor-intensive, lack theoretical guidance and hard to obtain optimal design results within vast design spaces, thus failing to full exploit the inherent performance potential of robots. In this context, this paper introduces the SERL (Structure Evolution Reinforcement Learning) algorithm, which combines reinforcement learning for locomotion tasks with evolution algorithms. The aim is to identify the optimal parameter combinations within a given multidimensional design space. Through the SERL algorithm, we successfully designed a bipedal robot named Wow Orin, where the optimal leg length are obtained through optimization based on body structure and motor torque. We have experimentally validated the effectiveness of the SERL algorithm, which is capable of optimizing the best structure within specified design space and task conditions. Additionally, to assess the performance gap between our designed robot and the current state-of-the-art robots, we compared Wow Orin with mainstream bipedal robots Cassie and Unitree H1. A series of experimental results demonstrate the Outstanding energy efficiency and performance of Wow Orin, further validating the feasibility of applying the SERL algorithm to practical design.