Atmospheric Density-Compensating Model Predictive Control for Targeted Reentry of Drag-Modulated Spacecraft
作者: Alex D. Hayes, Ryan J. Caverly
分类: eess.SY, cs.RO
发布日期: 2024-07-26 (更新: 2025-06-10)
备注: Accepted for publication in the Journal of Guidance, Control, and Dynamics
期刊: Journal of Guidance, Control, and Dynamics, Vol. 48, No. 11, pp. 2541-2556, 2025
DOI: 10.2514/1.G008665
💡 一句话要点
提出大气密度补偿模型预测控制,实现阻力调节航天器精确再入
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 再入制导 模型预测控制 扩展卡尔曼滤波 大气密度估计 阻力调节航天器
📋 核心要点
- 大气密度不确定性是阻力调节航天器再入制导的关键挑战,现有方法难以有效应对。
- 论文提出基于扩展卡尔曼滤波(EKF)的大气密度估计方法,并将其融入模型预测控制(MPC)框架。
- 蒙特卡罗模拟验证了该框架的有效性,在多数情况下实现了精确再入,显著优于现有方法。
📝 摘要(中文)
本文提出了一种估计和控制框架,能够在存在大气密度不确定性的情况下,实现阻力调节航天器的精确再入。具体而言,使用扩展卡尔曼滤波器(EKF)来估计飞行中相对于标称指导轨迹所用大气密度的密度误差。该信息被用于模型预测控制(MPC)策略中,以提高跟踪性能,减少控制工作量,并提高对执行器饱和的鲁棒性,优于现有技术水平的方法。该估计和控制框架在包含历史空间天气数据的蒙特卡罗模拟活动中进行了测试。这些模拟结果表明,所提出的框架能够在98.4%的情况下,在所有时间点保持在指导轨迹的100公里范围内。剩余的1.6%的案例由于较大的密度误差(许多是由于严重的太阳风暴和耀斑引起的)而被推离指导轨迹,这些误差无法通过阻力控制装置进行物理补偿。对于成功的案例,所提出的框架能够以12.1公里的平均误差将航天器引导至入口界面高度的期望位置,并且99.7%的案例低于100公里。
🔬 方法详解
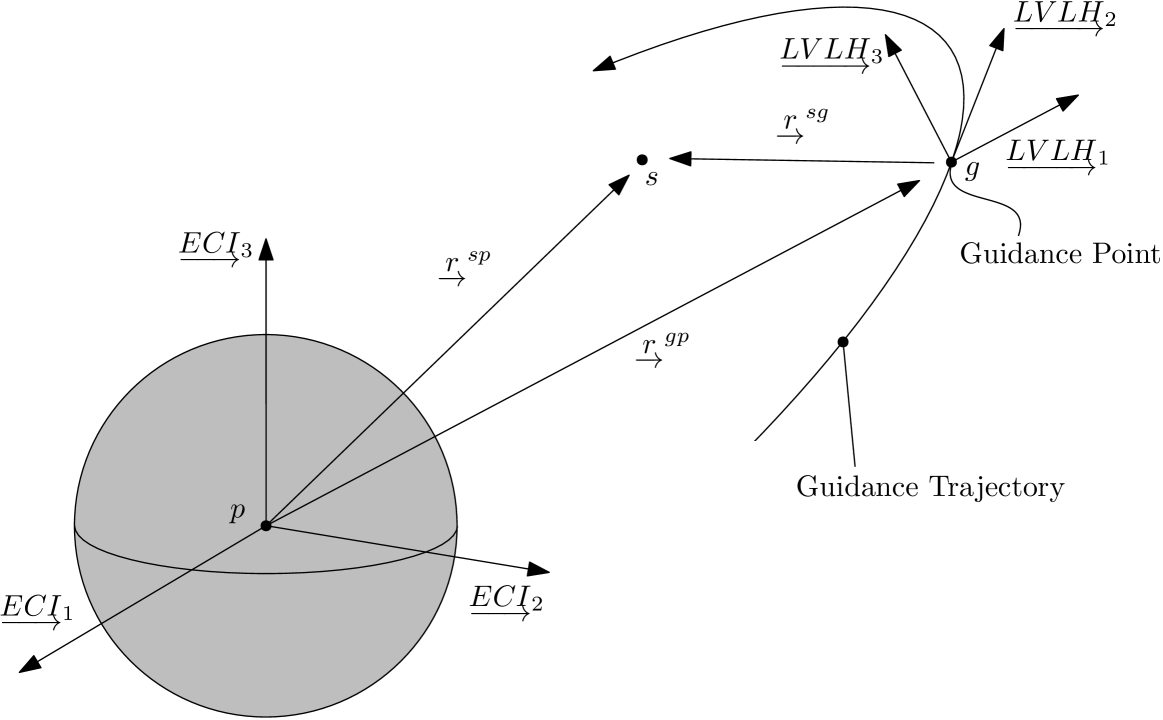
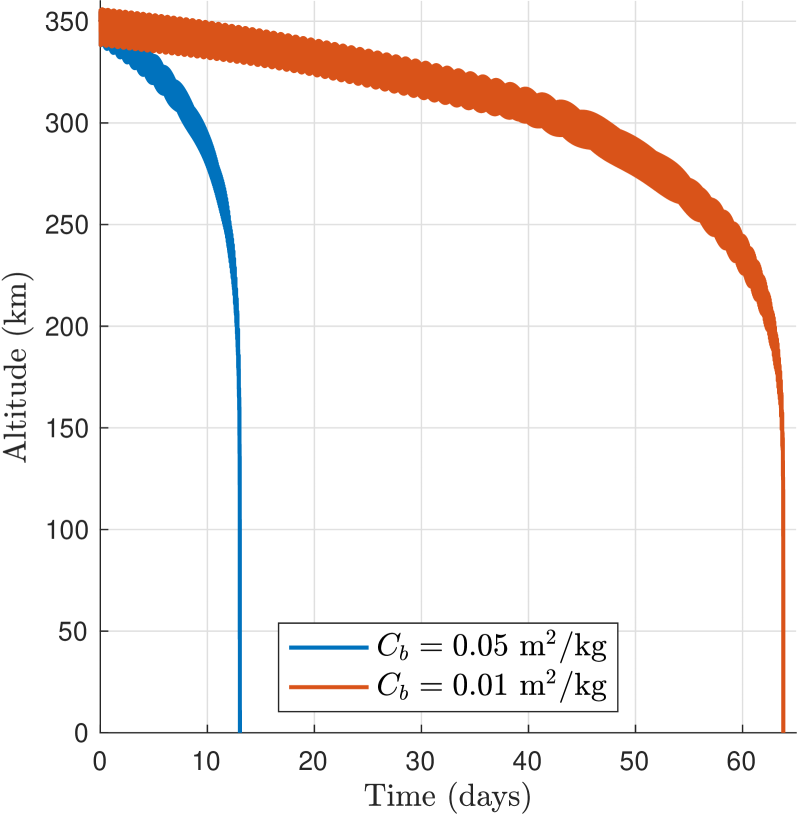
问题定义:阻力调节航天器再入过程中,大气密度的高度不确定性是影响再入精度和安全性的主要因素。传统方法通常依赖于静态大气模型,无法有效应对实际飞行中大气密度的动态变化,导致制导误差增大,甚至可能偏离预定落点。
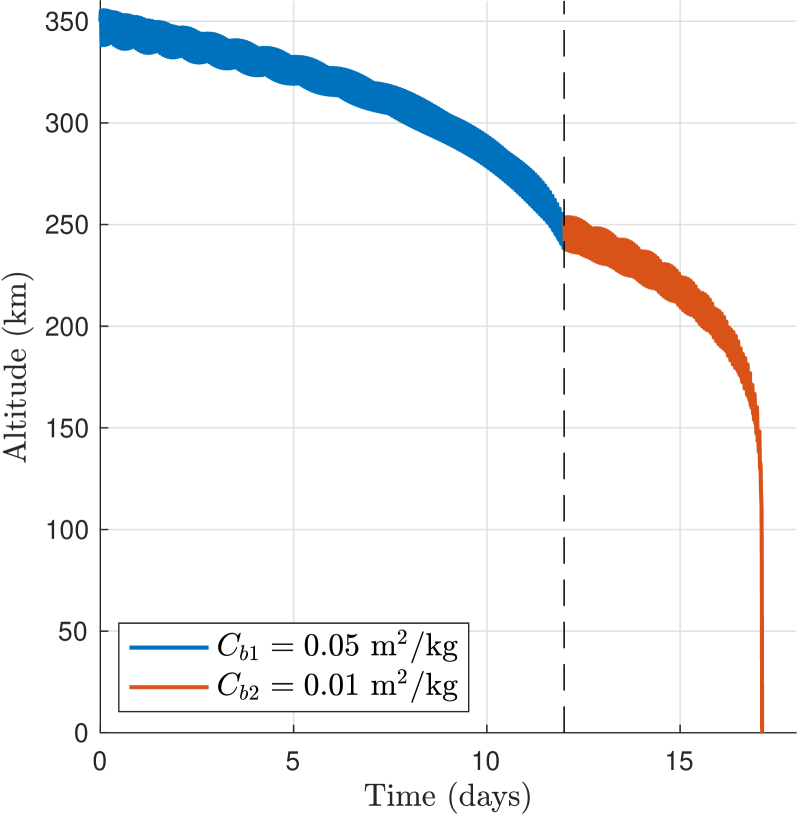
核心思路:论文的核心思路是利用扩展卡尔曼滤波器(EKF)实时估计大气密度误差,并将该估计值融入模型预测控制(MPC)框架中。通过在线估计大气密度误差,MPC能够动态调整控制策略,补偿大气密度变化带来的影响,从而提高再入精度和鲁棒性。
技术框架:该框架包含两个主要模块:大气密度估计模块和模型预测控制模块。大气密度估计模块使用扩展卡尔曼滤波器(EKF),基于航天器的状态测量和控制输入,实时估计大气密度误差。模型预测控制模块(MPC)利用大气密度误差的估计值,预测航天器未来的状态,并优化控制输入,以实现精确再入。这两个模块协同工作,形成一个闭环控制系统。
关键创新:该方法最重要的创新点在于将大气密度估计与模型预测控制相结合。通过实时估计大气密度误差,MPC能够动态调整控制策略,从而显著提高再入精度和鲁棒性。与传统方法相比,该方法能够更好地应对大气密度不确定性带来的挑战。
关键设计:扩展卡尔曼滤波器(EKF)的设计需要仔细选择状态变量、测量模型和过程噪声。模型预测控制(MPC)的设计需要选择合适的预测模型、成本函数和约束条件。成本函数通常包括跟踪误差和控制输入的加权和。约束条件包括执行器饱和限制和安全区域限制。具体参数的选择需要根据具体的航天器和任务要求进行调整。
🖼️ 关键图片
📊 实验亮点
蒙特卡罗模拟结果表明,该框架在98.4%的情况下,能够将航天器保持在指导轨迹的100公里范围内。对于成功的案例,该框架能够以12.1公里的平均误差将航天器引导至入口界面高度的期望位置,并且99.7%的案例低于100公里。这些结果表明,该框架能够显著提高再入精度,并具有良好的鲁棒性。
🎯 应用场景
该研究成果可应用于各类需要精确再入的航天任务,例如空间碎片清除、货运飞船返回、载人飞船返回等。通过提高再入精度,可以减少对地面人员和财产的威胁,并提高任务的安全性。此外,该方法还可以推广到其他受环境不确定性影响的控制问题中。
📄 摘要(原文)
This paper presents an estimation and control framework that enables the targeted reentry of a drag-modulated spacecraft in the presence of atmospheric density uncertainty. In particular, an extended Kalman filter (EKF) is used to estimate the in-flight density errors relative to the atmospheric density used to generate the nominal guidance trajectory. This information is leveraged within a model predictive control (MPC) strategy to improve tracking performance, reduce control effort, and increase robustness to actuator saturation compared to the state-of-the-art approach. The estimation and control framework is tested in a Monte Carlo simulation campaign with historical space weather data. These simulation efforts demonstrate that the proposed framework is able to stay within 100 km of the guidance trajectory at all points in time for 98.4% of cases. The remaining 1.6% of cases were pushed away from the guidance by large density errors, many due to significant solar storms and flares, that could not physically be compensated for by the drag control device. For the successful cases, the proposed framework was able to guide the spacecraft to the desired location at the entry interface altitude with a mean error of 12.1 km and 99.7% of cases below 100 km.