Neural Network Tire Force Modeling for Automated Drifting
作者: Nicholas Drake Broadbent, Trey Weber, Daiki Mori, J. Christian Gerdes
分类: eess.SY, cs.AI
发布日期: 2024-07-18
备注: 16th International Symposium on Advanced Vehicle Control (AVEC). September 2nd-6th, 2024. Milan, Italy
💡 一句话要点
提出基于神经网络的轮胎力模型,提升自动漂移车辆的路径跟踪精度
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 神经网络 轮胎力模型 自动漂移 车辆控制 非线性模型预测控制
📋 核心要点
- 自动漂移需要精确的轮胎力模型,传统物理模型难以捕捉复杂非线性特性。
- 利用神经网络学习轮胎力,替代传统模型,无需复杂的物理推导。
- 实验表明,该模型在自动漂移车辆上显著提升了路径跟踪性能,尤其是在前轴制动时。
📝 摘要(中文)
自动漂移对车辆控制提出了挑战,需要能够精确处理摩擦极限下非线性、耦合轮胎力的模型和控制算法。本文提出了一种神经网络架构,用于预测前轮侧向力,可直接替代基于物理的方法。在一个专为漂移动作设计的全尺寸自动驾驶车辆上,我们将这些模型部署在非线性模型预测控制器中,该控制器经过调整以跟踪参考漂移轨迹,从而直接比较模型性能。结果表明,在施加前轴制动力的情况下,神经网络轮胎模型比刷式轮胎模型表现出显著改善的路径跟踪性能,这表明神经网络能够表达先前未建模的漂移状态下的潜在动力学。
🔬 方法详解
问题定义:自动漂移车辆控制面临的挑战是精确建模轮胎力,尤其是在摩擦极限下的非线性、耦合特性。传统的基于物理的轮胎模型,如刷式轮胎模型,难以准确捕捉漂移状态下的复杂动力学特性,导致控制精度下降。现有方法难以有效处理前轴制动情况下的轮胎力建模问题。
核心思路:本文的核心思路是利用神经网络强大的非线性拟合能力,直接学习轮胎力与车辆状态之间的关系。通过神经网络,可以避免复杂的物理建模过程,直接从数据中学习轮胎的动态特性。这种方法能够捕捉传统模型难以表达的潜在动力学信息。
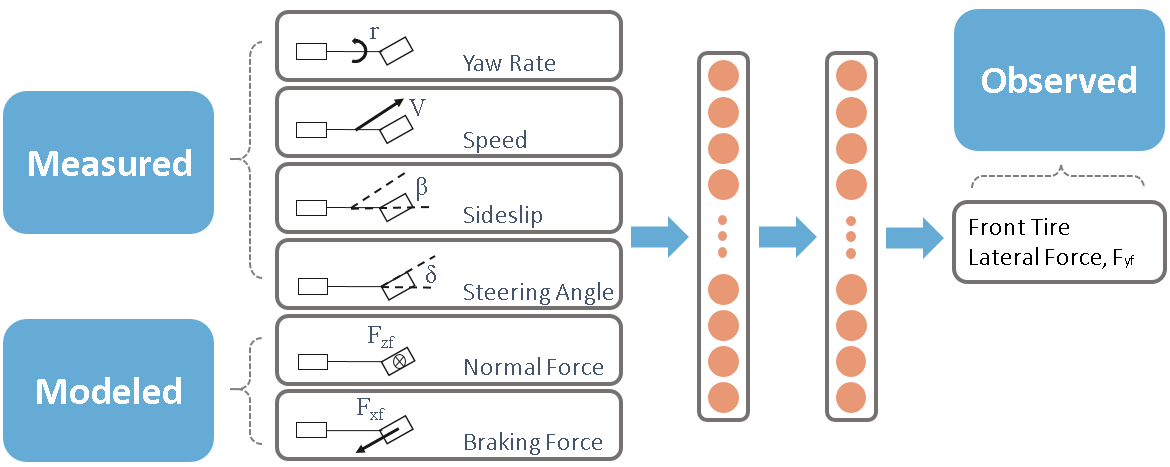
技术框架:该方法采用神经网络作为轮胎力模型,替代传统的物理模型。整体流程包括:1) 收集车辆在漂移状态下的数据,包括车辆状态(如速度、转向角、侧滑角等)和轮胎力;2) 使用收集到的数据训练神经网络,使其能够预测前轮侧向力;3) 将训练好的神经网络模型集成到非线性模型预测控制器(NMPC)中;4) 使用NMPC控制车辆跟踪参考漂移轨迹,并评估模型性能。
关键创新:最重要的技术创新点在于使用神经网络直接建模轮胎力,避免了复杂的物理建模过程。与传统的基于物理的模型相比,神经网络能够学习和表达先前未建模的、漂移状态下的潜在动力学特性。这种数据驱动的方法能够更好地适应复杂的非线性系统。
关键设计:论文中神经网络的具体结构和参数设置未知,但可以推断其输入应包含车辆状态信息(如速度、转向角、侧滑角等),输出为前轮侧向力。损失函数的设计目标是最小化神经网络预测的轮胎力与实际轮胎力之间的误差。控制器的设计采用非线性模型预测控制(NMPC),目标是跟踪参考漂移轨迹,并利用神经网络轮胎力模型进行预测和优化。
🖼️ 关键图片

📊 实验亮点
实验结果表明,在施加前轴制动力的情况下,基于神经网络的轮胎模型比刷式轮胎模型表现出显著改善的路径跟踪性能。具体性能提升数据未知,但结论表明神经网络能够更好地捕捉漂移状态下的复杂轮胎力特性,从而提升车辆的控制精度。
🎯 应用场景
该研究成果可应用于自动驾驶车辆的运动控制,尤其是在需要极限操控的场景下,如自动漂移、赛车等。更精确的轮胎力模型能够提升车辆的操控性能和安全性。此外,该方法也可以推广到其他车辆动力学建模问题,例如悬架系统建模、空气动力学建模等,具有广泛的应用前景。
📄 摘要(原文)
Automated drifting presents a challenge problem for vehicle control, requiring models and control algorithms that can precisely handle nonlinear, coupled tire forces at the friction limits. We present a neural network architecture for predicting front tire lateral force as a drop-in replacement for physics-based approaches. With a full-scale automated vehicle purpose-built for the drifting application, we deploy these models in a nonlinear model predictive controller tuned for tracking a reference drifting trajectory, for direct comparisons of model performance. The neural network tire model exhibits significantly improved path tracking performance over the brush tire model in cases where front-axle braking force is applied, suggesting the neural network's ability to express previously unmodeled, latent dynamics in the drifting condition.