Probabilistic Reachability Analysis of Stochastic Control Systems
作者: Saber Jafarpour, Zishun Liu, Yongxin Chen
分类: eess.SY, math.OC
发布日期: 2024-07-17 (更新: 2024-09-03)
💡 一句话要点
提出基于平均矩生成函数的随机控制系统概率可达性分析框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 随机控制系统 可达性分析 概率方法 平均矩生成函数 随机扰动 确定性系统 动态系统
📋 核心要点
- 现有方法难以有效处理同时存在随机扰动和确定性输入的动态系统的可达性问题。
- 论文提出解耦确定性输入和随机扰动影响的策略,并引入平均矩生成函数来概率性地约束随机轨迹与确定性轨迹的差异。
- 通过数值实验验证,该框架在可达集估计方面优于现有方法,并为随机系统的分析和控制提供了新思路。
📝 摘要(中文)
本文研究了连续时间随机动态系统的可达性问题。我们的目标是提出一个统一的框架,用于描述同时存在随机扰动和确定性输入的动态系统的可达集。为了实现这一目标,我们设计了一种策略,有效地将确定性输入和随机扰动对系统可达集的影响解耦。对于确定性部分,许多现有方法可以捕获确定性可达性。对于随机扰动,我们引入了一种新的技术,以概率方式约束随机轨迹与其确定性对应轨迹之间的差异。我们方法的关键是引入一种新的能量函数,称为平均矩生成函数,该函数为这种差异提供了高概率界限。对于线性随机动力学,这个界限是紧致和精确的,并且适用于一大类非线性随机动力学。通过将我们的创新技术与现有的确定性可达性分析方法相结合,我们可以计算出比当前随机可达性分析方法获得的可达集估计更优的结果。我们通过各种数值实验验证了我们框架的有效性。除了在可达性分析中的直接应用之外,我们的方法有望对随机系统的更广泛的分析和控制产生深远的影响。它为增强对复杂随机动力学的理解和操作开辟了道路,为相关领域的进步提供了机会。
🔬 方法详解
问题定义:论文旨在解决连续时间随机动态系统的可达性问题,即在同时存在随机扰动和确定性输入的情况下,如何准确有效地估计系统的可达集。现有方法通常难以将确定性输入和随机扰动的影响有效分离,导致可达集估计的精度不高,或者计算复杂度过高。
核心思路:论文的核心思路是将确定性输入和随机扰动的影响解耦。对于确定性部分,可以利用现有的确定性可达性分析方法进行处理。对于随机扰动部分,则通过引入一种新的能量函数——平均矩生成函数,来概率性地约束随机轨迹与其确定性对应轨迹之间的差异。这种解耦策略使得问题得以简化,并能够更精确地估计可达集。
技术框架:该方法的技术框架主要包含以下几个阶段: 1. 确定性可达性分析:利用现有方法,例如 Hamilton-Jacobi 可达性分析,计算仅考虑确定性输入时的可达集。 2. 随机扰动影响分析:引入平均矩生成函数,计算随机扰动对轨迹的影响,得到随机轨迹与其确定性轨迹之间差异的概率界限。 3. 可达集估计:将确定性可达集与随机扰动的影响相结合,得到最终的概率可达集估计。
关键创新:论文最重要的技术创新在于引入了平均矩生成函数,用于概率性地约束随机轨迹与其确定性对应轨迹之间的差异。与现有方法相比,该方法能够提供更紧致和精确的概率界限,尤其是在线性随机动力学系统中。此外,该方法也适用于一大类非线性随机动力学系统,具有更广泛的适用性。
关键设计:平均矩生成函数的设计是关键。具体而言,该函数被设计成能够捕捉随机扰动的统计特性,并提供一个高概率的界限,用于衡量随机轨迹与其确定性轨迹之间的偏差。该函数的具体形式取决于随机扰动的分布和系统的动力学特性。此外,如何有效地将平均矩生成函数与现有的确定性可达性分析方法相结合,也是一个重要的设计考虑。
🖼️ 关键图片
📊 实验亮点
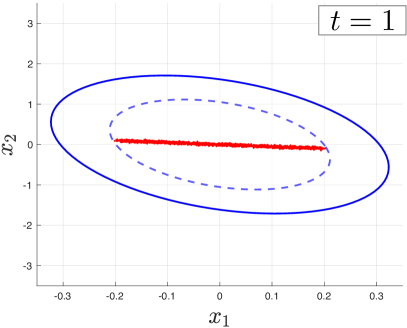
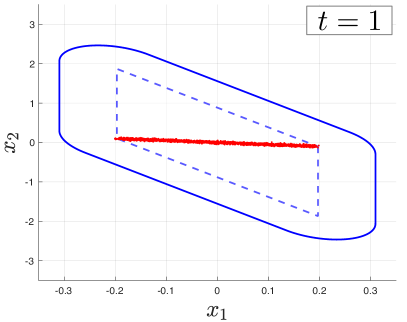
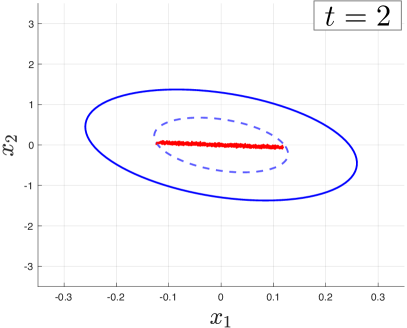
论文通过数值实验验证了所提出框架的有效性。实验结果表明,该方法能够计算出比当前随机可达性分析方法获得的可达集估计更优的结果。具体而言,该方法能够提供更紧致的概率界限,从而更精确地估计可达集。此外,实验还验证了该方法在处理非线性随机动力学系统方面的适用性。
🎯 应用场景
该研究成果可广泛应用于机器人运动规划、自动驾驶、航空航天等领域。例如,在机器人运动规划中,可以利用该方法估计机器人在存在环境噪声和控制误差情况下的可达区域,从而规划出更加安全可靠的运动轨迹。在自动驾驶领域,可以用于预测车辆在各种不确定因素影响下的行驶范围,提高驾驶安全性。此外,该方法还可用于分析和控制其他复杂的随机系统,例如电力系统、金融系统等。
📄 摘要(原文)
We address the reachability problem for continuous-time stochastic dynamic systems. Our objective is to present a unified framework that characterizes the reachable set of a dynamic system in the presence of both stochastic disturbances and deterministic inputs. To achieve this, we devise a strategy that effectively decouples the effects of deterministic inputs and stochastic disturbances on the reachable sets of the system. For the deterministic part, many existing methods can capture the deterministic reachability. As for the stochastic disturbances, we introduce a novel technique that probabilistically bounds the difference between a stochastic trajectory and its deterministic counterpart. The key to our approach is introducing a novel energy function termed the Averaged Moment Generating Function that yields a high probability bound for this difference. This bound is tight and exact for linear stochastic dynamics and applicable to a large class of nonlinear stochastic dynamics. By combining our innovative technique with existing methods for deterministic reachability analysis, we can compute estimations of reachable sets that surpass those obtained with current approaches for stochastic reachability analysis. We validate the effectiveness of our framework through various numerical experiments. Beyond its immediate applications in reachability analysis, our methodology is poised to have profound implications in the broader analysis and control of stochastic systems. It opens avenues for enhanced understanding and manipulation of complex stochastic dynamics, presenting opportunities for advancements in related fields.