Delta-V-Optimal Centralized Guidance Strategy For Under-actuated N-Satellite Formations
作者: Ahmed Mahfouz, Gabriella Gaias, Florio Dalla Vedova, Holger Voos
分类: eess.SY
发布日期: 2024-06-25 (更新: 2024-07-23)
期刊: Acta Astronautica Volume 228, March 2025, Pages 69-87
DOI: 10.1016/j.actaastro.2024.11.048
💡 一句话要点
针对欠驱动N星编队,提出Delta-V最优的集中式制导策略
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 卫星编队 轨道重构 欠驱动系统 凸优化 集中式制导
📋 核心要点
- 现有方法难以在欠驱动卫星编队中实现Delta-V最优的轨道重构,尤其是在考虑安全约束的情况下。
- 论文提出一种集中式制导策略,通过简化和近似非凸优化问题,将其转化为凸优化问题,从而降低计算复杂度。
- 通过广泛的基准测试,比较了不同凸优化公式的性能,并分析了它们在不同条件下的适用性。
📝 摘要(中文)
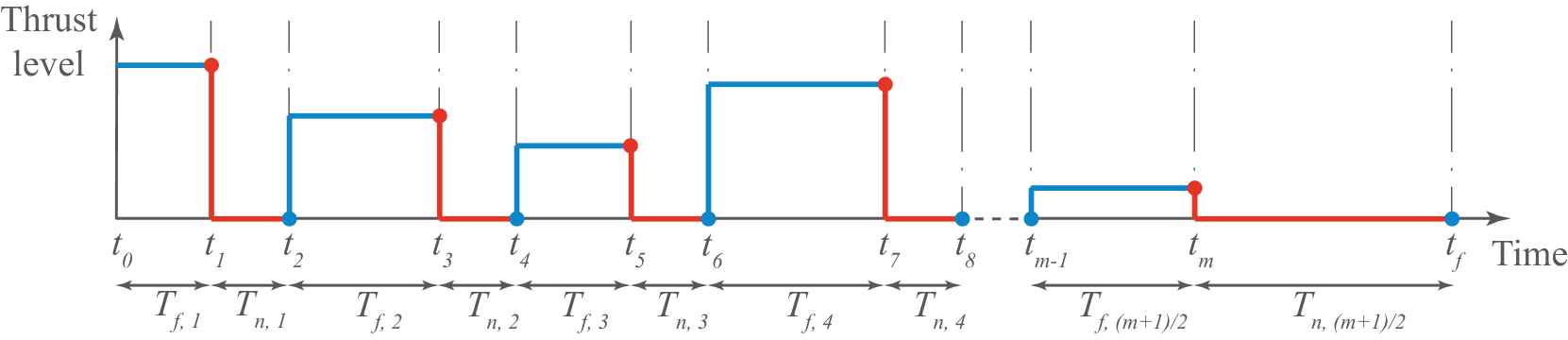
本文研究了以集中式方式计算卫星编队Delta-V最优且安全的相对轨道重构问题。所考虑的编队包含一个不受控制的主航天器和任意数量N个副卫星,其中每个副卫星都配备一个电动推进器。事实上,这代表了一种正被小型卫星平台制造商广泛采用的技术解决方案。虽然采用单个电动推进器确实降低了轨道控制系统所需的功率、重量和尺寸,但代价是使卫星欠驱动。在这种情况下,卫星只有在执行姿态机动以将推进器喷嘴重定向到与所需推力方向相反的方向后,才能提供所需的推力矢量。为了进一步扩展这种欠驱动平台的适用范围,开发了制导策略以支持N星编队的不同重构场景。本文从一个经典的非凸二次约束轨迹优化公式开始,通过多次简化和近似,得到了两个新的凸公式,即二阶锥规划公式和线性规划公式。本文提出了五种制导公式,其中最有希望的三种通过广泛的基准分析进行了比较,该分析应用于十五种最常用的求解器。该基准实验提供了关于不同问题公式之间关键区别的信息,以及在何种条件下可以推荐每种公式。
🔬 方法详解
问题定义:论文旨在解决欠驱动N星编队的Delta-V最优相对轨道重构问题。现有方法通常面临非凸优化问题,计算复杂度高,难以在实际应用中实现。此外,安全约束的考虑也增加了问题的难度。
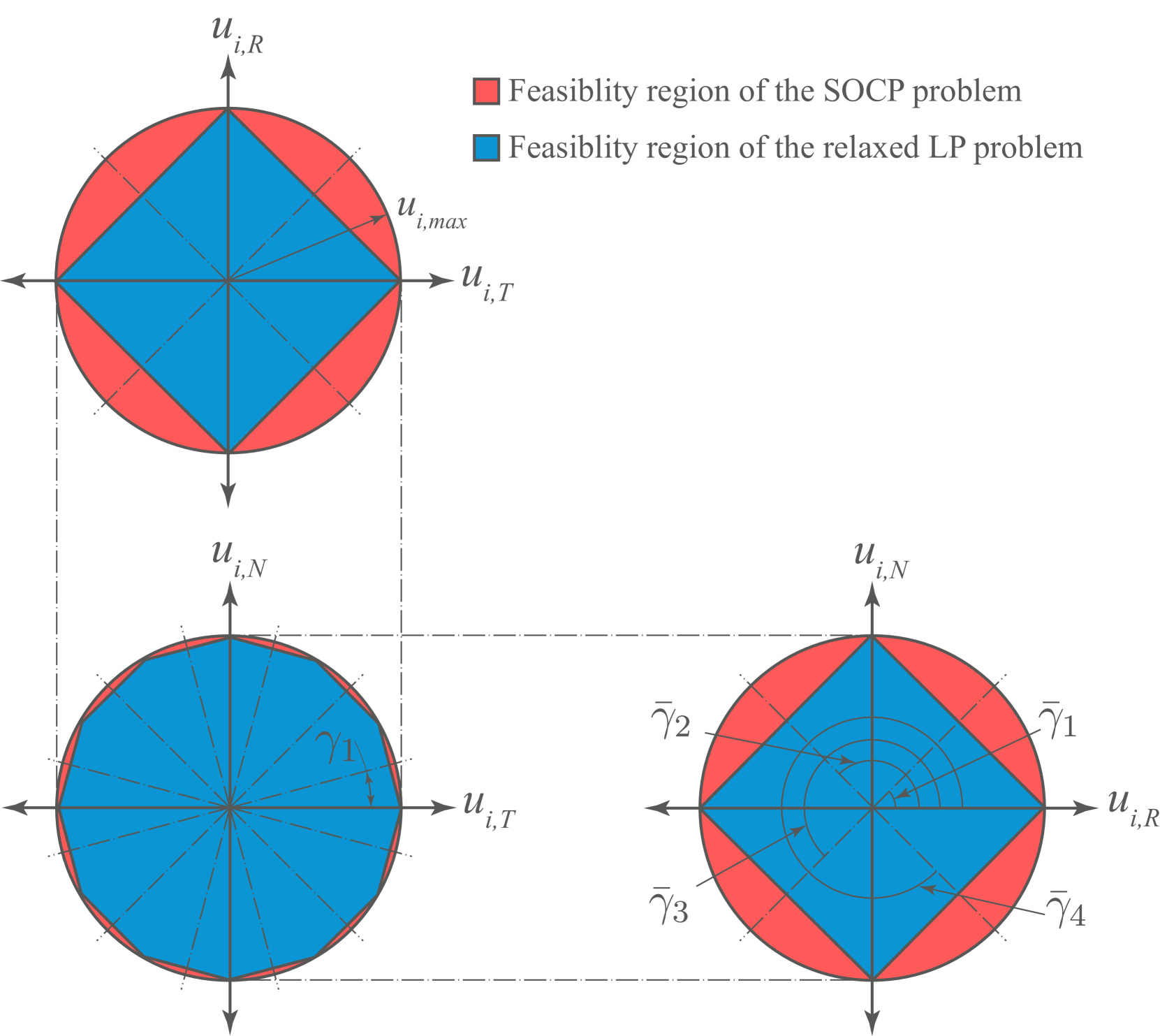
核心思路:论文的核心思路是将非凸的二次约束轨迹优化问题,通过一系列简化和近似,转化为凸优化问题,包括二阶锥规划(SOCP)和线性规划(LP)两种形式。这种转化降低了计算复杂度,使得可以在实际应用中快速求解。
技术框架:整体框架包括以下步骤:1) 建立N星编队相对轨道动力学模型;2) 定义Delta-V最优的轨道重构问题,并加入安全约束;3) 将非凸优化问题进行简化和近似,得到凸优化问题(SOCP和LP);4) 使用不同的凸优化求解器进行求解;5) 对比不同公式和求解器的性能。
关键创新:最重要的技术创新点在于将非凸优化问题转化为凸优化问题。这种转化使得可以使用高效的凸优化求解器,从而在保证性能的同时,降低了计算复杂度。与现有方法相比,该方法更适用于实际应用。
关键设计:论文提出了五种制导公式,其中三种最有希望的公式进行了详细的基准测试。关键设计包括:1) 如何进行简化和近似,以保证转化后的凸优化问题与原问题具有一定的等价性;2) 如何选择合适的凸优化求解器,以获得最佳的性能;3) 如何设置安全约束,以避免卫星之间的碰撞。
🖼️ 关键图片

📊 实验亮点
论文通过广泛的基准测试,比较了三种最有希望的制导公式在十五种最常用的求解器上的性能。实验结果表明,不同的公式在不同的条件下具有不同的优势。例如,某些公式在计算速度方面表现更好,而另一些公式在精度方面表现更好。这些结果为实际应用中选择合适的制导策略提供了重要的参考。
🎯 应用场景
该研究成果可应用于小型卫星编队飞行任务,例如对地观测、空间态势感知和通信等。通过优化卫星的轨道重构,可以提高任务的效率和灵活性,降低任务成本。此外,该方法还可以应用于其他欠驱动航天器的控制问题。
📄 摘要(原文)
This paper addresses the computation of Delta-V-optimal, safe, relative orbit reconfigurations for satellite formations in a centralized fashion. The formations under consideration comprise an uncontrolled chief spacecraft flying with an arbitrary number, N, of deputy satellites, where each deputy is equipped with a single electric thruster. Indeed, this represents a technological solution that is becoming widely employed by the producers of small-satellite platforms. While adopting a single electric thruster does reduce the required power, weight, and size of the orbit control system, it comes at the cost of rendering the satellite under-actuated. In this setting, the satellite can provide a desired thrust vector only after an attitude maneuver is carried out to redirect the thruster nozzle opposite to the desired thrust direction. In order to further extend the applicability range of such under-actuated platforms, guidance strategies are developed to support different reconfiguration scenarios for N-satellite formations. This paper starts from a classical non-convex quadratically constrained trajectory optimization formulation, which passes through multiple simplifications and approximations to arrive to two novel convex formulations, namely a second-order cone programming formulation, and a linear programming one. Out of five guidance formulations proposed in this article, the most promising three were compared through an extensive benchmark analysis that is applied to fifteen of the most widely-used solvers. This benchmark experiment provides information about the key distinctions between the different problem formulations, and under which conditions each one of them can be recommended.