Model Predictive Control on the Neural Manifold
作者: Christof Fehrman, C. Daniel Meliza
分类: q-bio.NC, eess.SY, q-bio.QM
发布日期: 2024-06-21 (更新: 2025-08-11)
💡 一句话要点
提出基于模型预测控制的神经流形控制方法,实现对神经元群体潜在动态的精确控制。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 神经流形 模型预测控制 脉冲神经网络 神经动力学 闭环控制
📋 核心要点
- 现有神经流形分析方法多为相关性分析,难以深入理解神经元活动的潜在动力学机制,缺乏有效的控制手段。
- 提出利用模型预测控制(MPC)方法,通过动态调整感觉输入,实现对神经元群体潜在活动轨迹的精确控制。
- 实验表明,相比PID控制,MPC在神经流形上的轨迹跟踪任务中表现更优,控制精度更高,且对超参数调整的需求更低。
📝 摘要(中文)
神经流形是表征神经元群体复杂行为的一种有吸引力的理论框架。然而,许多用于识别这些低维子空间的工具都是相关性的,并且对潜在的动力学提供有限的见解。精确控制神经回路的潜在活动将使研究人员能够研究神经流形的结构和功能。我们模拟使用闭环、动态生成的感官输入来控制神经元群体的潜在动态。使用脉冲神经网络(SNN)作为神经回路的模型,我们找到了网络活动(神经流形)和一组显着视觉刺激的低维表示。经典控制和最优控制领域提供了多种方法来选择控制神经流形上的动力学,这些方法在性能、计算成本和易于实现方面有所不同。在这里,我们重点关注两种常用的控制方法:比例-积分-微分(PID)控制和模型预测控制(MPC)。PID是一种计算量轻且易于实现的控制器。相比之下,MPC是一种基于模型的、预测性的控制器,具有更高的计算成本和工程开销。我们评估了这两种方法在潜在空间中的轨迹跟踪任务中,在部分可观测性和存在未知噪声的情况下。虽然这两种控制器在某些情况下都能够成功控制神经流形上的潜在动态,但MPC始终产生更精确的控制,并且需要更少的超参数调整。这些结果表明了如何使用数据驱动的动力学模型将MPC应用于神经流形,并提供了一个实验框架来测试流形动力学和外部刺激之间的因果关系。
🔬 方法详解
问题定义:论文旨在解决如何精确控制神经元群体在神经流形上的活动轨迹的问题。现有方法,如PID控制,在控制精度和鲁棒性方面存在不足,且需要大量的超参数调整。因此,需要一种更有效的控制方法,能够更好地理解和操纵神经元群体的动态行为。
核心思路:论文的核心思路是利用模型预测控制(MPC)的预测能力和优化能力,通过建立神经元群体动态的模型,预测未来一段时间内的神经元活动,并优化控制输入,从而实现对神经流形上轨迹的精确跟踪。MPC能够考虑到系统的约束和噪声,从而提高控制的鲁棒性。
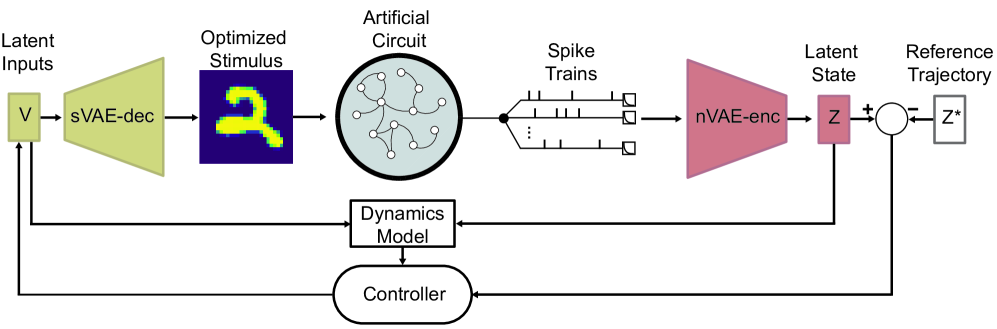
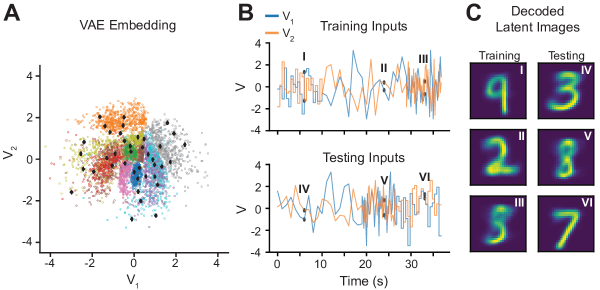
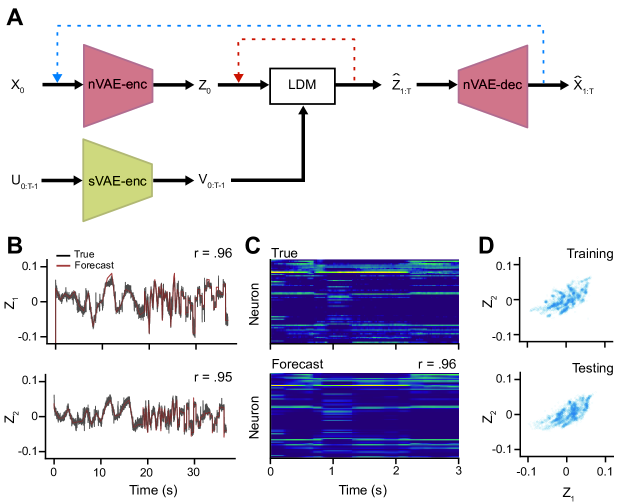
技术框架:整体框架包括以下几个主要模块:1)脉冲神经网络(SNN)模型,用于模拟神经元群体的活动;2)降维方法,用于提取SNN活动的低维表示,即神经流形;3)数据驱动的动力学模型,用于学习神经流形上的动态;4)模型预测控制器(MPC),基于动力学模型预测未来状态,并优化控制输入;5)闭环控制系统,将MPC的输出作为SNN的输入,实现对神经元活动的控制。
关键创新:论文的关键创新在于将模型预测控制(MPC)应用于神经流形的控制。与传统的PID控制相比,MPC是一种基于模型的预测控制方法,能够更好地处理系统的非线性、约束和噪声。此外,论文还提出了一种数据驱动的方法来学习神经流形上的动态模型,避免了手动建模的复杂性。
关键设计:论文使用脉冲神经网络(SNN)模拟神经元群体,并使用降维方法(具体方法未知)提取神经流形。动力学模型通过数据驱动的方式学习,具体模型结构未知。MPC控制器使用二次规划(QP)求解器进行优化,目标函数包括轨迹跟踪误差和控制输入的惩罚项。控制周期和预测步长等参数的选择对控制性能有重要影响,具体数值未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,模型预测控制(MPC)在神经流形上的轨迹跟踪任务中表现优于PID控制。MPC能够更精确地跟踪目标轨迹,并且对噪声和不确定性的鲁棒性更强。此外,MPC所需的超参数调整也更少,降低了工程实现的难度。具体的性能提升数据未知。
🎯 应用场景
该研究成果可应用于神经科学领域,帮助研究人员更深入地理解神经元群体动态与行为之间的关系。通过精确控制神经流形上的活动,可以研究特定神经元活动模式对行为的影响,从而揭示大脑的工作机制。此外,该方法还可能应用于脑机接口领域,实现对外部设备的精确控制。
📄 摘要(原文)
Neural manifolds are an attractive theoretical framework for characterizing the complex behaviors of neural populations. However, many of the tools for identifying these low-dimensional subspaces are correlational and provide limited insight into the underlying dynamics. The ability to precisely control the latent activity of a circuit would allow researchers to investigate the structure and function of neural manifolds. We simulate controlling the latent dynamics of a neural population using closed-loop, dynamically generated sensory inputs. Using a spiking neural network (SNN) as a model of a neural circuit, we find low-dimensional representations of both the network activity (the neural manifold) and a set of salient visual stimuli. The fields of classical and optimal control offer a range of methods to choose from for controlling dynamics on the neural manifold, which differ in performance, computational cost, and ease of implementation. Here, we focus on two commonly used control methods: proportional-integral-derivative (PID) control and model predictive control (MPC). PID is a computationally lightweight controller that is simple to implement. In contrast, MPC is a model-based, anticipatory controller with a much higher computational cost and engineering overhead. We evaluate both methods on trajectory-following tasks in latent space, under partial observability and in the presence of unknown noise. While both controllers in some cases were able to successfully control the latent dynamics on the neural manifold, MPC consistently produced more accurate control and required less hyperparameter tuning. These results demonstrate how MPC can be applied on the neural manifold using data-driven dynamics models, and provide a framework to experimentally test for causal relationships between manifold dynamics and external stimuli.