Maximum Likelihood Identification of Linear Models with Integrating Disturbances for Offset-Free Control
作者: Steven J. Kuntz, James B. Rawlings
分类: eess.SY, math.OC
发布日期: 2024-06-06 (更新: 2025-09-11)
备注: 46 pages, 14 figures
期刊: in IEEE Transactions on Automatic Control, vol. 70, no. 9, pp. 5675-5689, 2025
💡 一句话要点
提出一种基于最大似然估计的线性模型辨识方法,用于无偏模型预测控制。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 最大似然估计 线性模型辨识 积分扰动 卡尔曼滤波
📋 核心要点
- 现有模型预测控制方法在存在扰动时难以实现无偏控制,扰动模型精度直接影响控制性能。
- 该论文提出使用最大似然估计辨识带有积分扰动的线性模型,并结合卡尔曼滤波进行状态和扰动估计。
- 通过实施特征值约束,并使用障碍函数和Cholesky分解,保证滤波器稳定性和计算效率,并在实际系统中验证了算法有效性。
📝 摘要(中文)
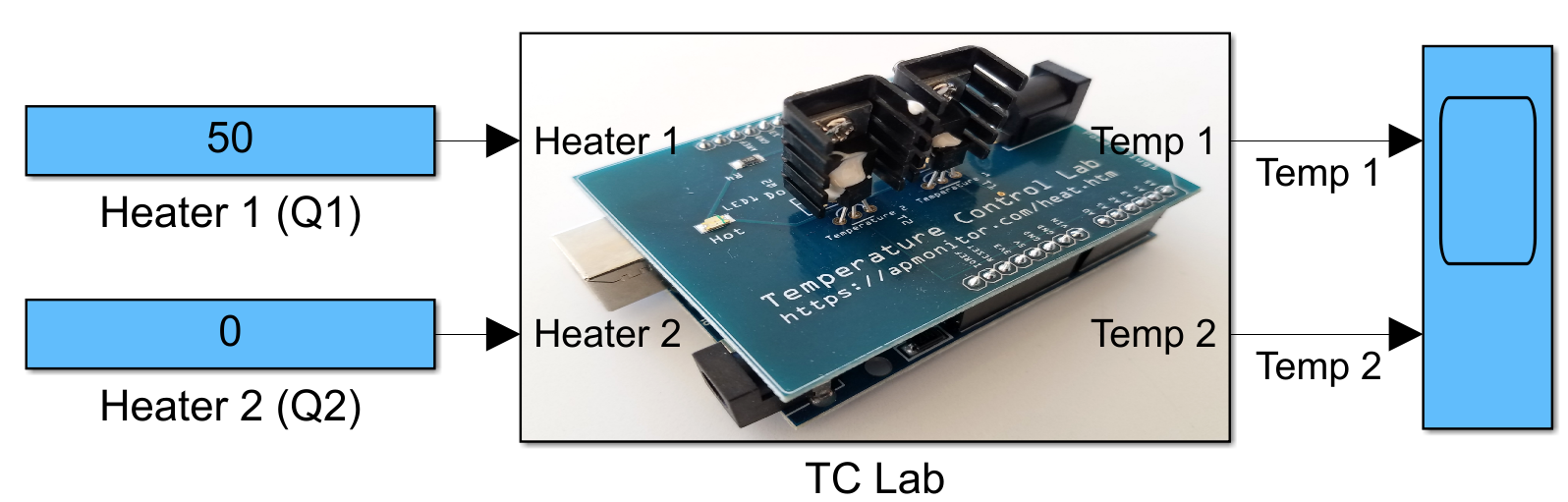
本报告探讨了用于无偏模型预测控制的模型的最大似然辨识问题。该方法将线性时不变模型与(虚拟的)不可控积分模式(称为积分扰动)相结合。状态和扰动通常使用卡尔曼滤波器进行估计。扰动估计有效地提供了积分控制,因此扰动模型(以及由此产生的滤波器)的质量直接影响控制性能。我们实施了特征值约束,以防止不良的滤波器行为(不稳定或临界稳定模式、高频振荡)。具体来说,我们考虑了线性矩阵不等式(LMI)区域作为特征值约束。这些LMI区域默认是开集,因此我们引入了一种障碍函数方法来创建更严格但封闭的特征值约束。为了解决由此产生的非线性半定规划问题,我们使用Cholesky分解方法将其近似为非线性规划,该方法利用了半定优化变量和矩阵不等式的已知稀疏结构。该算法应用于来自两个物理系统的真实数据:一个适用于课堂实验室的低成本基准温度微控制器,以及位于田纳西州金斯波特的伊士曼化学工厂的工业规模化学反应器。
🔬 方法详解
问题定义:论文旨在解决模型预测控制中,由于模型不准确或存在未建模扰动,导致控制出现偏差的问题。现有方法难以准确辨识扰动模型,从而影响控制性能,尤其是在需要无偏控制的场景下。
核心思路:核心思路是将线性时不变模型与积分扰动相结合,并将扰动视为不可控的积分模式。通过最大似然估计方法同时辨识系统动态和扰动模型,利用卡尔曼滤波器估计状态和扰动,从而实现对扰动的补偿,达到无偏控制的目的。
技术框架:整体框架包括以下几个步骤:1) 建立带有积分扰动的线性时不变模型;2) 使用最大似然估计方法辨识模型参数,包括系统动态参数和扰动模型参数;3) 设计卡尔曼滤波器,用于估计系统状态和扰动;4) 实施特征值约束,保证滤波器稳定性;5) 使用辨识出的模型和卡尔曼滤波器进行模型预测控制。
关键创新:关键创新在于:1) 将积分扰动显式地建模到线性模型中,使得能够直接估计和补偿扰动;2) 引入特征值约束,防止滤波器出现不稳定或高频振荡等不良行为;3) 提出了一种基于障碍函数和Cholesky分解的优化方法,用于解决带有特征值约束的最大似然估计问题,提高了计算效率。
关键设计:关键设计包括:1) 使用线性矩阵不等式(LMI)区域来定义特征值约束;2) 使用障碍函数方法将开集的LMI区域转化为闭集,以便进行优化;3) 使用Cholesky分解方法将半定规划问题近似为非线性规划问题,并利用稀疏结构加速计算;4) 针对具体系统,选择合适的输入输出变量和采样时间。
🖼️ 关键图片


📊 实验亮点
该算法在两个实际系统上进行了验证:一个低成本温度微控制器和一个工业规模化学反应器。实验结果表明,该方法能够有效地辨识扰动模型,并实现无偏控制。具体性能数据未在摘要中给出,但强调了该方法在实际工业场景中的可行性和有效性。
🎯 应用场景
该研究成果可应用于各种需要精确控制和扰动抑制的工业过程,例如化工、制药、电力等领域。通过准确辨识和补偿扰动,可以提高控制系统的性能,减少产品质量波动,降低能源消耗,并提高生产效率。该方法对于实现高精度、高可靠性的自动化控制系统具有重要意义。
📄 摘要(原文)
This report addresses the maximum likelihood identification of models for offset-free model predictive control, where linear time-invariant models are augmented with (fictitious) uncontrollable integrating modes, called integrating disturbances. The states and disturbances are typically estimated with a Kalman filter. The disturbance estimates effectively provide integral control, so the quality of the disturbance model (and resulting filter) directly influences the control performance. We implement eigenvalue constraints to protect against undesirable filter behavior (unstable or marginally stable modes, high-frequency oscillations). Specifically, we consider the class of linear matrix inequality (LMI) regions for eigenvalue constraints. These LMI regions are open sets by default, so we introduce a barrier function method to create tightened, but closed, eigenvalue constraints. To solve the resulting nonlinear semidefinite program, we approximate it as a nonlinear program using a Cholesky factorization method that exploits known sparsity structures of semidefinite optimization variables and matrix inequalities. The algorithm is applied to real-world data taken from two physical systems: a low-cost benchmark temperature microcontroller suitable for classroom laboratories, and an industrial-scale chemical reactor at Eastman Chemical's plant in Kingsport, TN.