Excitable crawling
作者: Juncal Arbelaiz, Alessio Franci, Naomi Ehrich Leonard, Rodolphe Sepulchre, Bassam Bamieh
分类: eess.SY, cs.RO
发布日期: 2024-05-31
备注: 5 pages, MTNS 2024 extended abstract
💡 一句话要点
提出基于神经元兴奋性的软体机器人蠕动控制方法,实现内源性爬行运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 运动控制 神经元兴奋性 FitzHugh-Nagumo模型 脉冲控制器
📋 核心要点
- 软体机器人运动控制面临挑战,传统方法难以实现高效、自适应的爬行运动。
- 受神经元兴奋性启发,设计双稳态脉冲控制器,通过机电耦合实现内源性爬行。
- 几何分析验证了控制策略的有效性,量纲分析揭示了机电动态特征尺度与步态的关系。
📝 摘要(中文)
本文提出并分析了一种脉冲控制器的适用性,用于设计软体机器人爬行器的运动。受到神经元兴奋性FitzHugh-Nagumo模型的启发,我们设计了一个具有电触发器电路表示的双稳态控制器,当与被动爬行器机械结构耦合时,能够按需生成脉冲。来自爬行器机械结构的本体感受感觉信号将控制器的双稳态性转变为有节奏的脉冲。反过来,输出电压激活爬行器的执行器,以产生通过蠕动波的运动。我们通过几何分析表明,这种控制策略实现了内源性爬行。机电传感器运动互连提供了具身负反馈调节,从而促进了运动。量纲分析提供了关于爬行器机械和电气动力学中的特征尺度的见解,以及它们如何决定爬行步态。可以设想对电气尺度进行自适应控制以最佳匹配机械尺度,从而实现更高的效率,就像神经元电路的稳态调节一样。我们的方法可以扩展到受生物中央模式发生器启发的多个传感器运动环路。
🔬 方法详解
问题定义:软体机器人,特别是爬行机器人的运动控制是一个复杂的问题。现有的控制方法可能缺乏生物的自适应性和效率,难以应对复杂环境。如何设计一种能够产生自然、高效爬行运动的控制器是本研究要解决的核心问题。
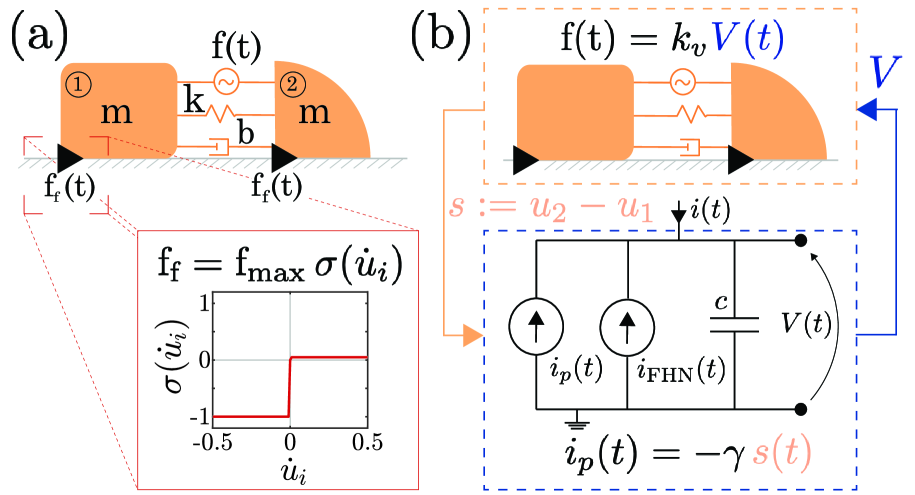
核心思路:论文的核心思路是借鉴生物神经系统的兴奋性机制,特别是FitzHugh-Nagumo模型,设计一个能够产生脉冲信号的控制器。通过将该控制器与软体机器人的机械结构耦合,利用本体感受信号调节控制器的状态,从而实现内源性的爬行运动。这种方法旨在模仿生物的中央模式发生器(CPG),实现更自然、更具适应性的运动控制。
技术框架:整体框架包括以下几个主要模块:1) 软体爬行器机械结构:作为被控对象,其运动状态通过传感器反馈。2) 双稳态脉冲控制器:基于FitzHugh-Nagumo模型设计,能够产生脉冲信号。3) 机电耦合:通过传感器将爬行器的机械状态反馈给控制器,控制器的输出电压驱动爬行器的执行器。4) 几何分析:用于分析控制策略的稳定性和运动特性。
关键创新:最重要的技术创新点在于将神经元兴奋性的概念引入到软体机器人的运动控制中。与传统的控制方法相比,该方法更注重利用系统的内在动力学特性,通过简单的控制规则实现复杂的运动模式。此外,通过机电耦合实现具身负反馈调节,提高了系统的鲁棒性和适应性。
关键设计:控制器的关键设计在于其双稳态特性,这使得控制器能够在两种稳定状态之间切换,从而产生脉冲信号。控制器的参数需要根据爬行器的机械特性进行调整,以实现最佳的运动效果。量纲分析用于确定爬行器机械和电气动力学中的特征尺度,并指导参数的选择。此外,可以考虑自适应控制策略,根据环境变化动态调整控制器的参数。
🖼️ 关键图片
📊 实验亮点
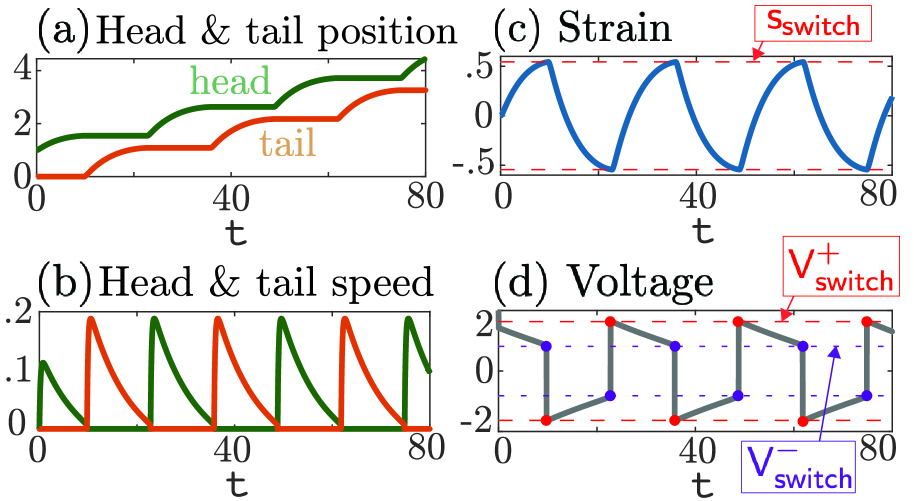
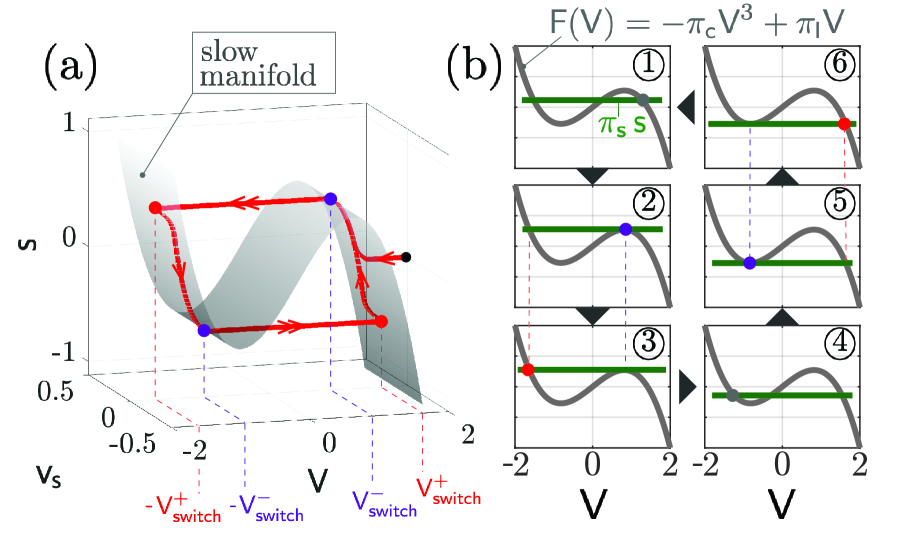
论文通过几何分析验证了所提出的控制策略能够实现内源性爬行。量纲分析揭示了爬行器机械和电气动力学中的特征尺度,为参数设计提供了理论指导。虽然论文中没有提供具体的性能数据,但其提出的控制框架为软体机器人的运动控制提供了一种新的思路。
🎯 应用场景
该研究成果可应用于搜救机器人、医疗机器人、管道检测机器人等领域。通过模仿生物的运动方式,可以设计出更灵活、更具适应性的机器人,使其能够在复杂、狭小的环境中执行任务。未来的研究可以进一步探索多传感器融合和更复杂的控制策略,以实现更高级的运动控制功能。
📄 摘要(原文)
We propose and analyze the suitability of a spiking controller to engineer the locomotion of a soft robotic crawler. Inspired by the FitzHugh-Nagumo model of neural excitability, we design a bistable controller with an electrical flipflop circuit representation capable of generating spikes on-demand when coupled to the passive crawler mechanics. A proprioceptive sensory signal from the crawler mechanics turns bistability of the controller into a rhythmic spiking. The output voltage, in turn, activates the crawler's actuators to generate movement through peristaltic waves. We show through geometric analysis that this control strategy achieves endogenous crawling. The electro-mechanical sensorimotor interconnection provides embodied negative feedback regulation, facilitating locomotion. Dimensional analysis provides insights on the characteristic scales in the crawler's mechanical and electrical dynamics, and how they determine the crawling gait. Adaptive control of the electrical scales to optimally match the mechanical scales can be envisioned to achieve further efficiency, as in homeostatic regulation of neuronal circuits. Our approach can scale up to multiple sensorimotor loops inspired by biological central pattern generators.