Decoupling Torque and Stiffness: A Unified Modeling and Control Framework for Antagonistic Artificial Muscles
作者: Amirhossein Kazemipour, Robert K. Katzschmann
分类: cs.RO
发布日期: 2026-04-07
💡 一句话要点
针对拮抗式人工肌肉,提出解耦扭矩和刚度的统一建模与控制框架
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 人工肌肉 扭矩控制 刚度控制 逆动力学 阻抗控制 深度自适应 机器人控制 人机交互
📋 核心要点
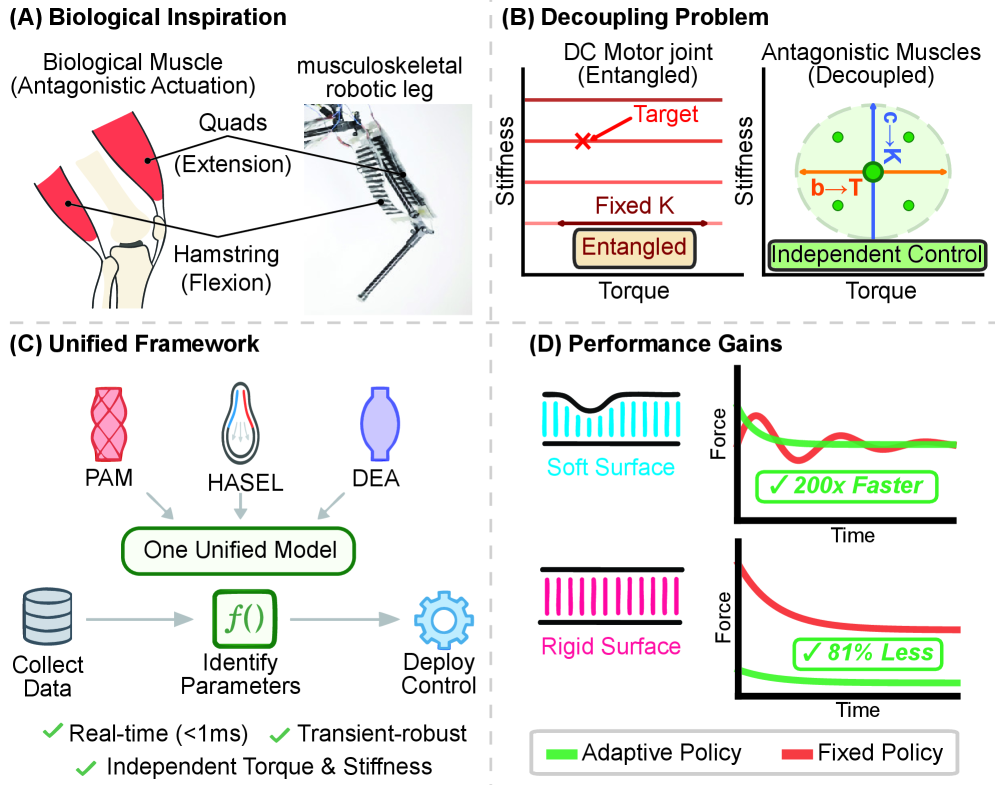
- 现有拮抗式人工肌肉在解耦扭矩和刚度时,易受接触瞬态影响,导致控制性能下降。
- 提出一种统一的实时控制框架,通过可分离的力模型、逆动力学控制器和深度自适应刚度策略,实现扭矩和刚度的独立控制。
- 实验表明,该框架能有效跟踪扭矩和刚度,并在不同刚度环境中实现稳定的阻抗控制,为自适应机器人交互提供基础。
📝 摘要(中文)
拮抗式人工肌肉能够解耦关节扭矩和刚度,但接触瞬态过程通常会降低这种独立性。本文提出了一个统一的实时框架,适用于气动、电动液压和介电弹性体人工肌肉:一个可分离的Padé力模型,带有一个最小的二态动态封装器;一个在协同收缩/偏置坐标系中的级联逆动力学控制器;以及一个生物启发式的深度自适应交互策略,该策略根据穿透深度来调度刚度。该控制器在每个控制周期内运行时间小于1毫秒,并展示了独立的扭矩和刚度跟踪,包括一个固定扭矩刚度阶跃测试,该测试在刚度转换过程中保持扭矩调节。在一个模拟的跨软到硬环境的耦合阻抗接触协议中,将深度自适应刚度与固定刚度基线进行比较,揭示了冲击/负载与稳定性之间的权衡。这些结果为肌肉骨骼拮抗机器人提供了面向控制的基础,使其能够在动态交互中执行自适应阻抗行为。
🔬 方法详解
问题定义:拮抗式人工肌肉系统旨在模仿生物肌肉的特性,实现关节扭矩和刚度的独立控制。然而,在实际应用中,尤其是在与环境发生接触时,由于接触瞬态的影响,扭矩和刚度之间往往存在耦合,导致控制精度下降和系统稳定性问题。现有的控制方法难以有效地解耦扭矩和刚度,无法在动态交互环境中实现鲁棒的阻抗控制。
核心思路:本文的核心思路是通过建立精确的力模型和设计合理的控制策略,实现扭矩和刚度的解耦控制。具体来说,首先建立一个可分离的Padé力模型,该模型能够准确地描述人工肌肉的力学特性。然后,设计一个级联逆动力学控制器,该控制器在协同收缩/偏置坐标系中运行,能够独立地控制扭矩和刚度。最后,引入一个生物启发式的深度自适应交互策略,该策略根据穿透深度动态地调整刚度,从而实现自适应的阻抗控制。
技术框架:该框架主要包含三个模块:力模型、控制器和交互策略。力模型采用可分离的Padé模型,用于描述人工肌肉的力学特性。控制器采用级联逆动力学控制,在协同收缩/偏置坐标系中运行,实现扭矩和刚度的独立控制。交互策略采用生物启发式的深度自适应策略,根据穿透深度动态地调整刚度。整体流程为:首先,根据期望的扭矩和刚度,通过逆动力学控制器计算出人工肌肉的控制信号。然后,将控制信号输入到人工肌肉中,产生相应的力和运动。最后,通过深度自适应交互策略,根据环境的反馈动态地调整刚度。
关键创新:该论文的关键创新在于以下几个方面:1) 提出了一个可分离的Padé力模型,该模型能够准确地描述人工肌肉的力学特性,并且易于进行控制设计。2) 设计了一个级联逆动力学控制器,该控制器能够在协同收缩/偏置坐标系中独立地控制扭矩和刚度。3) 引入了一个生物启发式的深度自适应交互策略,该策略能够根据环境的反馈动态地调整刚度,从而实现自适应的阻抗控制。与现有方法相比,该方法能够更有效地解耦扭矩和刚度,并在动态交互环境中实现更鲁棒的阻抗控制。
关键设计:力模型采用可分离的Padé模型,其参数通过实验数据进行标定。控制器采用级联结构,包含扭矩控制环和刚度控制环。扭矩控制环采用PID控制,刚度控制环采用前馈控制加反馈控制。深度自适应交互策略根据穿透深度计算出期望的刚度值,然后通过刚度控制环实现对刚度的精确控制。
🖼️ 关键图片

📊 实验亮点
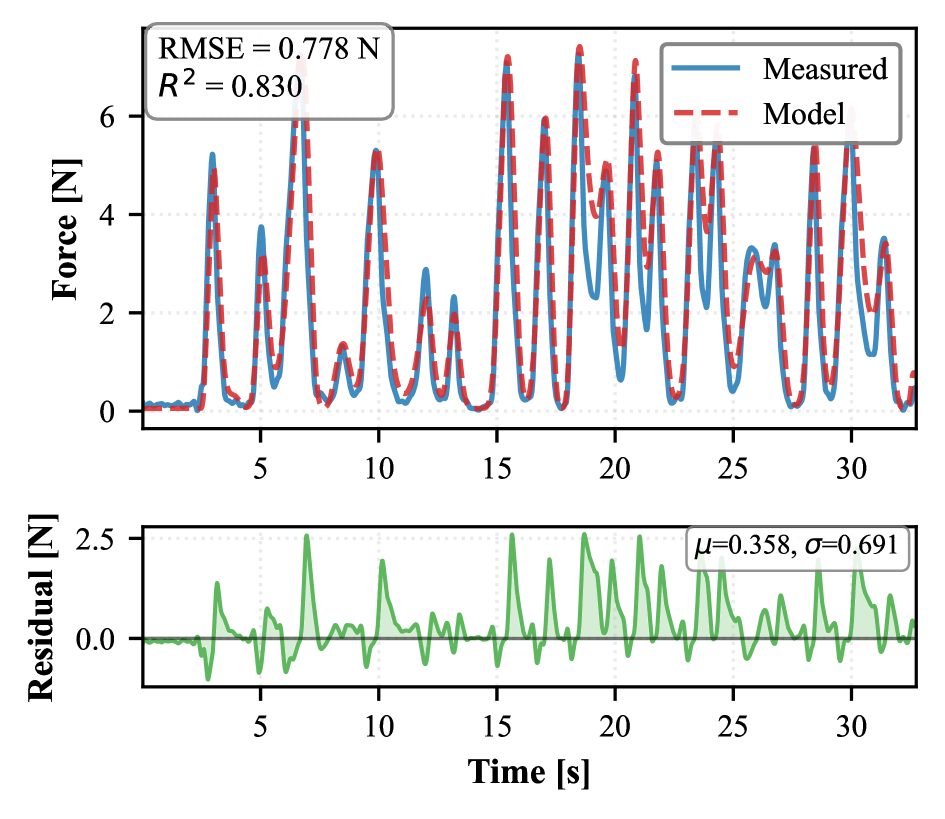
实验结果表明,该框架能够实现独立的扭矩和刚度跟踪,控制器运行速度小于1ms。在固定扭矩刚度阶跃测试中,该框架能够在刚度转换过程中保持扭矩的稳定。在模拟的软到硬环境的耦合阻抗接触实验中,深度自适应刚度策略相比于固定刚度策略,能够在冲击/负载和稳定性之间取得更好的平衡。
🎯 应用场景
该研究成果可应用于肌肉骨骼机器人、康复机器人、人机协作等领域。通过实现对机器人关节扭矩和刚度的精确控制,可以提高机器人在复杂环境中的适应性和安全性,使其能够更好地与人类进行交互和协作。例如,在康复机器人中,可以根据患者的康复情况动态调整机器人的刚度,提供个性化的康复训练。
📄 摘要(原文)
Antagonistic artificial muscles can decouple joint torque and stiffness, but contact transients often degrade this independence. We present a unified real-time framework applicable across pneumatic, electrohydraulic, and dielectric elastomer artificial muscle families: a separable Padé force model with a minimal two-state dynamic wrapper, a cascaded inverse-dynamics controller in co-contraction/bias coordinates, and a bio-inspired depth-adaptive interaction policy that schedules stiffness based on penetration depth. The controller runs in under 1 ms per control tick and demonstrates independent torque and stiffness tracking, including a fixed-torque stiffness-step test that preserves torque regulation through stiffness transitions. In a coupled impedance contact protocol simulated across soft-to-rigid environments, comparing depth-adaptive stiffness to fixed-stiffness baselines reveals a shock/load versus stability tradeoff. These results provide a control-oriented foundation for musculoskeletal antagonistic robots to execute adaptive impedance behaviors in dynamic interactions.