Terra: Hierarchical Terrain-Aware 3D Scene Graph for Task-Agnostic Outdoor Mapping
作者: Chad R. Samuelson, Abigail Austin, Seth Knoop, Blake Romrell, Gabriel R. Slade, Timothy W. McLain, Joshua G. Mangelson
分类: cs.RO
发布日期: 2026-04-06
💡 一句话要点
Terra:面向任务无关户外建图的分层地形感知3D场景图
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D场景图 地形感知 户外建图 自主机器人 语义地图
📋 核心要点
- 现有户外环境地图构建方法缺乏高级语义理解和组织,限制了机器人的高级推理能力。
- 提出了一种结合室内3DSG技术、户外几何建图和地形感知推理的新方法,构建地形感知的分层3D场景图。
- 实验表明,该方法在对象检索方面与现有方法相当,在区域分类方面优于现有方法,同时保持内存效率。
📝 摘要(中文)
户外智能自主机器人操作依赖于环境的充分表达地图。传统的几何建图方法保留了必要的环境结构信息,但缺乏语义理解和组织,无法进行高级机器人推理。3D场景图(3DSG)通过将几何、拓扑和语义关系集成到多层基于图的地图中来解决此限制。户外自主操作通常依赖于地形信息,这取决于任务或机器人平台的可通过性。我们提出了一种新颖的方法,该方法将室内3DSG技术与标准户外几何建图和地形感知推理相结合,从而为户外环境生成地形感知位置节点和分层组织的区域。我们的方法生成任务无关的度量-语义稀疏地图,并从此地图构建3DSG以用于下游规划任务,同时保持自主机器人操作的轻量级。我们全面的评估表明,我们的3DSG方法在对象检索方面与最先进的基于相机的3DSG方法相当,并且在区域分类方面超过了它们,同时保持了内存效率。我们证明了它在模拟和真实环境中对象检索和区域监控等各种机器人任务中的有效性。
🔬 方法详解
问题定义:现有户外环境地图构建方法主要集中在几何信息的精确重建,缺乏对环境语义信息的有效整合和组织,难以支持机器人进行高级别的任务规划和推理。此外,地形信息在户外机器人操作中至关重要,但现有方法往往忽略或未能充分利用地形信息。
核心思路:论文的核心思路是将室内3D场景图(3DSG)技术扩展到户外环境,并融入地形感知能力。通过构建分层的3DSG,将几何、拓扑和语义信息整合在一起,同时利用地形信息来增强场景理解和机器人导航能力。这种方法旨在创建一个任务无关的、轻量级的地图表示,能够支持各种下游机器人任务。
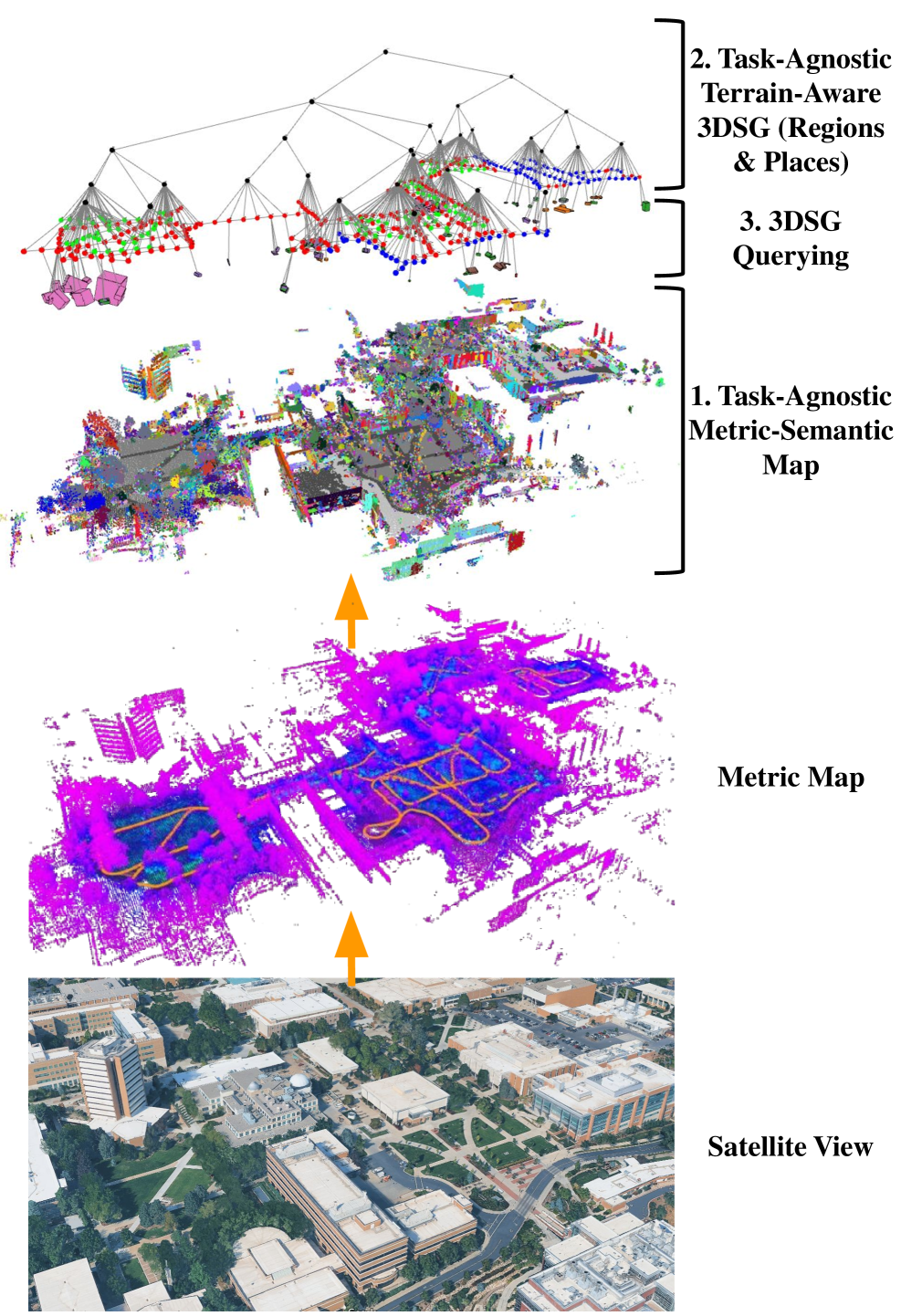
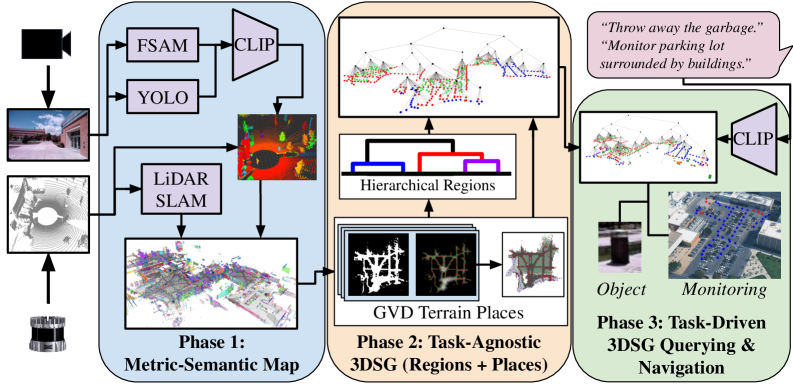
技术框架:该方法主要包含以下几个阶段:1) 构建度量-语义稀疏地图:利用传感器数据(如相机、激光雷达)构建包含几何和语义信息的稀疏地图。2) 地形感知位置节点生成:基于地形信息,生成具有地形感知能力的位置节点。3) 分层区域组织:将位置节点组织成层次化的区域,形成3DSG的拓扑结构。4) 3DSG构建:将几何、拓扑和语义信息整合到3DSG中,用于下游任务。
关键创新:该方法的关键创新在于将室内3DSG技术与户外地形感知相结合,构建了分层的地形感知3D场景图。与现有方法相比,该方法能够更有效地整合几何、拓扑、语义和地形信息,从而提高机器人对户外环境的理解和推理能力。此外,该方法旨在构建任务无关的地图表示,能够支持各种下游机器人任务。
关键设计:论文中可能涉及的关键设计包括:1) 地形特征提取方法:如何从传感器数据中提取地形特征,例如坡度、粗糙度等。2) 位置节点的地形感知表示:如何将地形信息融入到位置节点的表示中。3) 分层区域组织的策略:如何根据地形和语义信息将位置节点组织成层次化的区域。4) 3DSG的构建和更新机制:如何有效地构建和更新3DSG,以适应环境的变化。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在对象检索方面与最先进的基于相机的3DSG方法性能相当,同时在区域分类方面优于现有方法。此外,该方法在保持内存效率的同时,能够在模拟和真实环境中成功应用于对象检索和区域监控等机器人任务,验证了其在实际应用中的有效性。
🎯 应用场景
该研究成果可广泛应用于户外自主机器人领域,例如:农业机器人(作物监测、精准施肥)、巡检机器人(电力巡检、安防巡逻)、物流机器人(户外配送)、搜索救援机器人等。通过提供更丰富、更结构化的环境信息,该方法能够提高机器人在复杂户外环境中的导航、规划和决策能力,从而实现更高效、更可靠的自主操作。
📄 摘要(原文)
Outdoor intelligent autonomous robotic operation relies on a sufficiently expressive map of the environment. Classical geometric mapping methods retain essential structural environment information, but lack a semantic understanding and organization to allow high-level robotic reasoning. 3D scene graphs (3DSGs) address this limitation by integrating geometric, topological, and semantic relationships into a multi-level graph-based map. Outdoor autonomous operations commonly rely on terrain information either due to task-dependence or the traversability of the robotic platform. We propose a novel approach that combines indoor 3DSG techniques with standard outdoor geometric mapping and terrain-aware reasoning, producing terrain-aware place nodes and hierarchically organized regions for outdoor environments. Our method generates a task-agnostic metric-semantic sparse map and constructs a 3DSG from this map for downstream planning tasks, all while remaining lightweight for autonomous robotic operation. Our thorough evaluation demonstrates our 3DSG method performs on par with state-of-the-art camera-based 3DSG methods in object retrieval and surpasses them in region classification while remaining memory efficient. We demonstrate its effectiveness in diverse robotic tasks of object retrieval and region monitoring in both simulation and real-world environments.