Auction-Based Task Allocation with Energy-Conscientious Trajectory Optimization for AMR Fleets
作者: Jiachen Li, Soovadeep Bakshi, Jian Chu, Shihao Li, Dongmei Chen
分类: cs.RO, eess.SY
发布日期: 2026-03-23
💡 一句话要点
提出基于拍卖的任务分配与节能轨迹优化框架,提升AMR车队效率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人任务分配 轨迹优化 能量优化 拍卖算法 自主移动机器人
📋 核心要点
- 现有AMR任务分配方法忽略了能量消耗和环境摩擦差异,导致效率降低。
- 提出分层框架,结合拍卖机制分配任务,并优化能量最小轨迹,考虑电池模型和避碰。
- 实验表明,该方法在不同场景下比传统方法节能11.8%,重调度延迟低于10毫秒。
📝 摘要(中文)
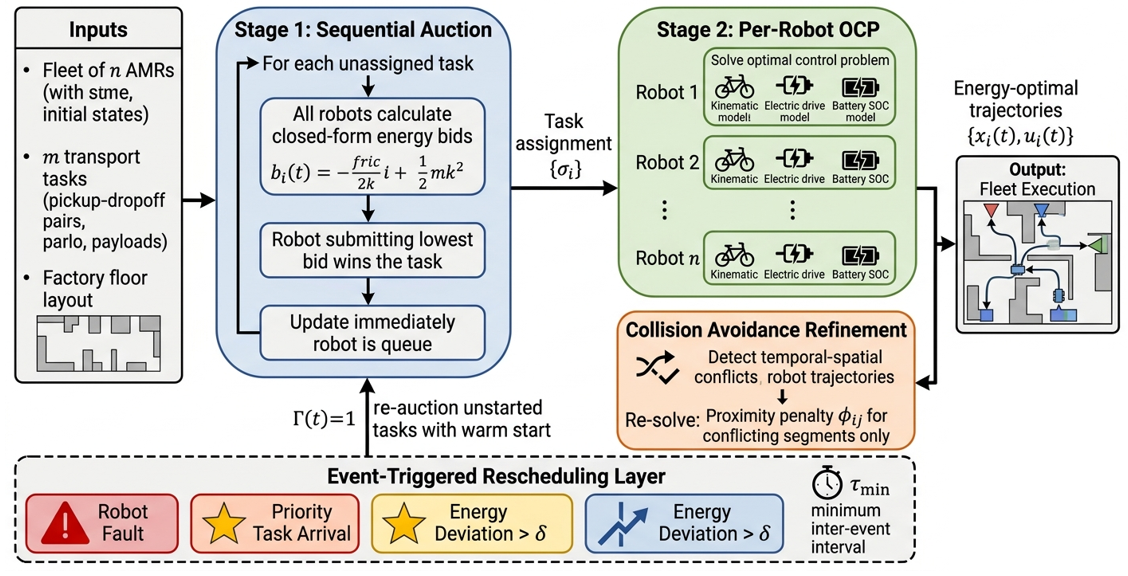
本文提出了一种分层两阶段框架,用于非对称任务空间中的多机器人任务分配和轨迹优化:(1)使用闭式投标函数进行顺序拍卖来分配任务;(2)每个机器人独立求解一个最优控制问题,以获得具有基于物理的电池模型的能量最小轨迹,然后使用成对邻近惩罚进行避碰优化。事件触发的温启动重调度,具有有界触发频率,可处理机器人故障、优先级到达和能量偏差。在三个工厂布局上的2-20个机器人和最多100个任务的505个场景中,基于能量和距离的拍卖变体比最近任务分配平均节省11.8%的能量,重调度延迟低于10毫秒。中心发现是,投标指标性能取决于状态:在均匀工作空间中,距离投标优于能量投标3.5%(p < 0.05,Wilcoxon),因为15.7%的闭式近似误差将投标排名准确度降低至87%;但是,当工作空间摩擦异质性足够时(r < 0.85能量-距离相关性),区域感知能量投标优于距离投标2-2.4%。这些结果为从业者提供了指导:在接近均匀的地形中使用距离投标,并在摩擦变化显着时使用能量感知投标。
🔬 方法详解
问题定义:论文旨在解决多自主移动机器人(AMR)车队在非对称任务空间中的任务分配和轨迹优化问题。现有方法通常采用最近邻分配或简单的距离度量,忽略了机器人能量消耗的差异以及工作空间中摩擦异质性的影响,导致整体效率降低和能源浪费。此外,现有方法在处理机器人故障、新任务到达等动态事件时,缺乏有效的重调度机制。
核心思路:论文的核心思路是将任务分配和轨迹优化解耦,采用分层框架。首先,通过顺序拍卖机制进行任务分配,利用闭式投标函数快速评估任务成本。其次,每个机器人独立进行能量最小轨迹优化,并考虑电池模型和避碰约束。这种解耦策略降低了问题的复杂度,提高了计算效率。同时,引入事件触发的温启动重调度机制,以应对动态环境变化。
技术框架:该框架包含两个主要阶段:(1)基于拍卖的任务分配:采用顺序拍卖机制,每个机器人根据自身状态和任务特性,计算投标价格。论文提出了基于距离和基于能量两种投标函数。拍卖过程迭代进行,直到所有任务都被分配。(2)能量最小轨迹优化:每个机器人独立求解最优控制问题,目标是最小化能量消耗。该优化过程考虑了机器人的动力学模型、电池模型以及避碰约束。为了提高计算效率,采用温启动策略,并使用成对邻近惩罚进行避碰优化。此外,框架还包含一个事件触发的重调度模块,用于处理动态事件。
关键创新:论文的关键创新在于:(1)提出了基于能量的投标函数,能够更准确地反映机器人在不同摩擦区域执行任务的实际成本。(2)引入了事件触发的温启动重调度机制,能够快速响应动态环境变化,保证系统的鲁棒性。(3)通过实验分析,揭示了投标指标性能与工作空间特性的关系,为实际应用提供了指导。
关键设计:在基于能量的投标函数中,考虑了机器人在不同摩擦区域的能量消耗差异。电池模型采用基于物理的模型,能够更准确地预测电池状态。在轨迹优化中,采用二次规划求解器,并使用温启动策略加速求解过程。事件触发的重调度机制采用有界触发频率,避免了频繁重调度带来的计算负担。
🖼️ 关键图片


📊 实验亮点
实验结果表明,与最近任务分配相比,该方法平均节能11.8%。在均匀工作空间中,距离投标表现更好,但在摩擦异质性较高的环境中,能量投标优于距离投标2-2.4%。重调度延迟低于10毫秒,表明该方法具有良好的实时性。这些结果为实际应用中选择合适的投标策略提供了重要依据。
🎯 应用场景
该研究成果可应用于各种需要多机器人协同作业的场景,如智能仓储、自动化工厂、物流配送等。通过优化任务分配和轨迹规划,可以显著降低能源消耗,提高工作效率,并增强系统的鲁棒性。该方法尤其适用于摩擦系数变化较大的复杂环境,例如存在不同地面材质的工厂车间。
📄 摘要(原文)
This paper presents a hierarchical two-stage framework for multi-robot task allocation and trajectory optimization in asymmetric task spaces: (1) a sequential auction allocates tasks using closed-form bid functions, and (2) each robot independently solves an optimal control problem for energy-minimal trajectories with a physics-based battery model, followed by a collision avoidance refinement step using pairwise proximity penalties. Event-triggered warm-start rescheduling with bounded trigger frequency handles robot faults, priority arrivals, and energy deviations. Across 505 scenarios with 2-20 robots and up to 100 tasks on three factory layouts, both energy- and distance-based auction variants achieve 11.8% average energy savings over nearest-task allocation, with rescheduling latency under 10 ms. The central finding is that bid-metric performance is regime-dependent: in uniform workspaces, distance bids outperform energy bids by 3.5% (p < 0.05, Wilcoxon) because a 15.7% closed-form approximation error degrades bid ranking accuracy to 87%; however, when workspace friction heterogeneity is sufficient (r < 0.85 energy-distance correlation), a zone-aware energy bid outperforms distance bids by 2-2.4%. These results provide practitioner guidance: use distance bids in near-uniform terrain and energy-aware bids when friction variation is significant.