Caterpillar-Inspired Spring-Based Compressive Continuum Robot for Bristle-based Exploration
作者: Zhixian Hu, Yu She, Juan Wachs
分类: cs.RO
发布日期: 2026-03-10
备注: Accepted by RoboSoft 2026
💡 一句话要点
提出一种受毛毛虫启发的弹簧压缩连续体机器人,用于基于刷毛的管道空间探索
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 连续体机器人 腱驱动 弹簧结构 密闭空间探索 接触感知
📋 核心要点
- 传统刚性机器人在管道等密闭空间探索中面临空间限制和几何结构不规则等挑战。
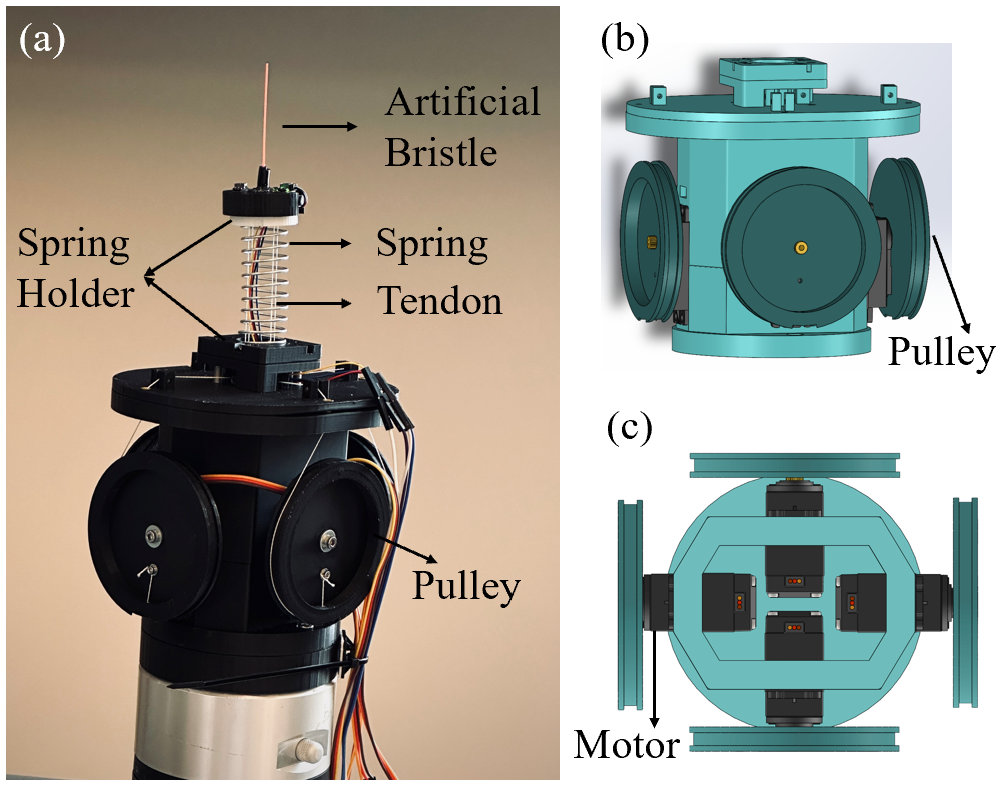
- 设计了一种基于弹簧的腱驱动连续体机器人,模仿毛毛虫的运动方式,实现弯曲和轴向长度变化。
- 实验结果表明,该机器人具有良好的定位精度,并集成了刷毛接触传感器,可用于表面感知和空间探索。
📝 摘要(中文)
本文提出了一种受毛毛虫运动和感知启发的紧凑型弹簧驱动连续体机器人,该机器人与商用机械臂集成,用于密闭空间检测。该系统结合了机械柔顺的连续体结构和腱驱动模块,实现了弯曲和轴向长度变化的耦合。采用恒定曲率运动学模型进行位置控制。实验表明,在所提出的模型和控制流程下,平均位置误差为4.32毫米。为了将系统从运动扩展到检测,我们集成了一个人工刷毛接触传感器,并通过接触交互展示了表面感知和密闭空间探索。这种紧凑且柔顺的设计为商用机器人提供了一种经济高效的升级方案,并有望在具有挑战性的环境中进行有效的探索。
🔬 方法详解
问题定义:现有刚性机器人在狭小、不规则的密闭空间(如管道)中进行探索面临诸多挑战,包括空间限制、几何形状复杂以及进入困难等问题。这些限制使得传统机器人难以有效地进行检测、维护等任务。
核心思路:本文的核心思路是借鉴毛毛虫的运动方式,设计一种柔顺的连续体机器人。通过模仿毛毛虫的身体结构和运动机制,实现机器人在狭小空间内的灵活移动和感知。利用弹簧结构提供柔顺性,腱驱动实现精确控制,从而克服刚性机器人的局限性。
技术框架:该机器人系统主要包括以下几个模块:1) 连续体机器人本体:采用弹簧结构,具有良好的柔顺性,能够适应复杂环境。2) 腱驱动模块:通过控制腱的张力,实现机器人的弯曲和轴向运动。3) 运动学模型:采用恒定曲率模型,用于精确控制机器人的位置和姿态。4) 接触传感器:集成了人工刷毛接触传感器,用于感知周围环境,实现表面感知和空间探索。5) 控制系统:基于运动学模型,实现对腱驱动模块的精确控制,从而控制机器人的运动。
关键创新:该论文的关键创新在于:1) 将弹簧结构与腱驱动相结合,实现了连续体机器人的柔顺性和可控性。2) 集成了人工刷毛接触传感器,实现了机器人在密闭空间内的表面感知和空间探索。3) 提出了一种基于恒定曲率模型的运动学控制方法,实现了对机器人位置和姿态的精确控制。
关键设计:在关键设计方面,采用了弹簧结构来保证机器人的柔顺性,并允许轴向压缩。腱驱动系统的设计保证了弯曲和轴向运动的耦合。恒定曲率运动学模型简化了控制算法的复杂性。人工刷毛接触传感器的选择保证了在狭小空间内的有效感知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该机器人在所提出的模型和控制流程下,平均位置误差为4.32毫米,验证了运动学模型的有效性和控制系统的精度。通过集成人工刷毛接触传感器,实现了对密闭空间表面的有效感知和探索,展示了该机器人在复杂环境下的适应性和实用性。该设计为商用机器人提供了一种经济高效的升级方案。
🎯 应用场景
该研究成果可应用于管道检测、航空航天器内部检查、医疗内窥镜等领域。该机器人能够进入传统机器人无法到达的狭小空间,进行检测、维护等任务,具有重要的实际应用价值。未来,该技术有望进一步发展,实现更复杂的运动和感知功能,为各行业提供更高效、更安全的解决方案。
📄 摘要(原文)
Exploration of confined spaces, such as pipelines and ducts, remains challenging for conventional rigid robots due to limited space, irregular geometry, and restricted access. Inspired by caterpillar locomotion and sensing, this paper presents a compact spring-based tendon-driven continuum robot that integrates with commercial robotic arms for confined-space inspection. The system combines a mechanically compliant continuum body with a tendon actuation module, enabling coupled bending and axial length change, and uses a constant-curvature kinematic model for positional control. Experiments show a mean position error of 4.32 mm under the proposed model and control pipeline. To extend the system from motion to inspection, we integrate an artificial bristle contact sensor and demonstrate surface perception and confined-space exploration through contact interactions. This compact and compliant design offers a cost-effective upgrade for commercial robots and promises effective exploration in challenging environments.