DAGS-SLAM: Dynamic-Aware 3DGS SLAM via Spatiotemporal Motion Probability and Uncertainty-Aware Scheduling
作者: Li Zhang, Yu-An Liu, Xijia Jiang, Conghao Huang, Danyang Li, Yanyong Zhang
分类: cs.RO
发布日期: 2026-02-25
💡 一句话要点
DAGS-SLAM:基于时空运动概率和不确定性感知的动态场景3DGS SLAM
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱八:物理动画 (Physics-based Animation)
关键词: 动态SLAM 3D高斯溅射 时空运动概率 不确定性感知 实时重建
📋 核心要点
- 现有动态3DGS SLAM依赖光流和逐帧分割,计算成本高,且在光照变化下不稳定。
- DAGS-SLAM通过时空运动概率状态和不确定性调度,按需进行语义分割,降低计算负担。
- 实验表明,DAGS-SLAM在保持实时性的同时,提高了重建质量和跟踪鲁棒性。
📝 摘要(中文)
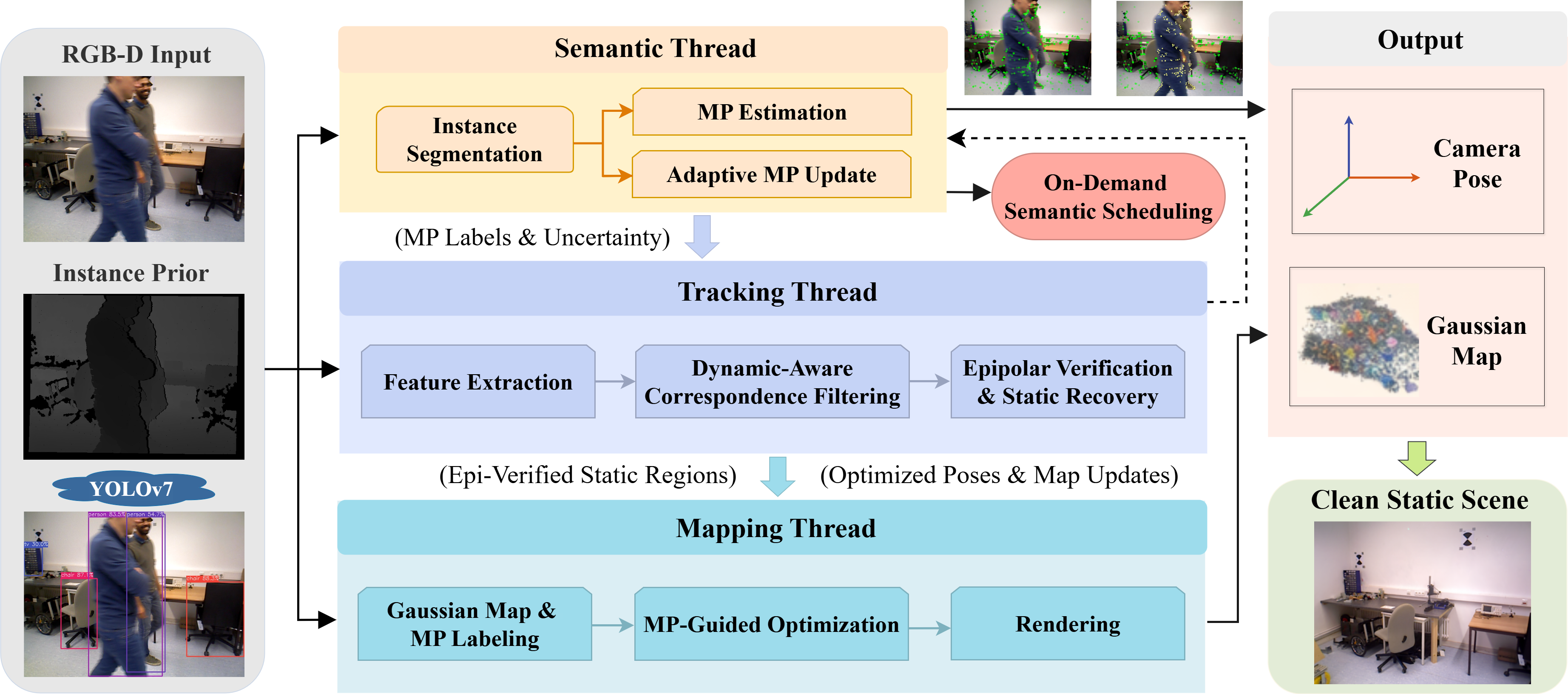
本文提出DAGS-SLAM,一种动态感知的3D高斯溅射(3DGS)SLAM系统,旨在解决移动机器人和物联网设备在计算和能源受限条件下对实时定位和稠密重建的需求。该系统为每个高斯维护一个时空运动概率(MP)状态,并通过不确定性感知的调度器按需触发语义分割。DAGS-SLAM融合轻量级的YOLO实例先验和几何线索来估计和时序更新MP,将MP传播到前端以进行动态感知的对应关系选择,并通过MP引导的优化来抑制后端的动态伪影。在公共动态RGB-D基准测试上的实验表明,该系统在商品GPU上实现了改进的重建和鲁棒的跟踪,同时保持了实时吞吐量,展示了在减少语义调用方面实现实用速度-精度权衡,从而更适合移动部署。
🔬 方法详解
问题定义:现有的动态场景SLAM方法,特别是基于3D高斯溅射的方法,通常依赖于计算量大的光流和逐帧语义分割来处理动态物体。这些方法在计算资源有限的移动机器人和物联网设备上难以实现实时性,并且在光照条件不佳的情况下容易失效。因此,如何在计算资源受限的情况下,实现动态场景下的实时、鲁棒的稠密SLAM是一个关键问题。
核心思路:DAGS-SLAM的核心思路是为每个3D高斯维护一个时空运动概率(MP)状态,该状态表示了该高斯点属于动态物体的概率。通过融合轻量级的YOLO实例先验和几何线索来估计和更新MP,并利用MP指导前端的对应关系选择和后端的优化,从而抑制动态物体的影响。这种方法避免了对每一帧都进行昂贵的语义分割,而是根据不确定性按需触发语义分割,从而降低了计算成本。
技术框架:DAGS-SLAM系统主要包含以下几个模块:1) 运动概率估计模块:融合YOLO实例先验和几何线索,估计每个3D高斯的初始运动概率。2) 运动概率时序更新模块:利用卡尔曼滤波等方法,根据连续帧之间的观测结果,对运动概率进行时序更新。3) 动态感知的前端跟踪模块:利用运动概率对特征点进行加权,从而在前端跟踪过程中优先选择静态特征点,抑制动态特征点的影响。4) 运动概率引导的后端优化模块:利用运动概率对3D高斯进行加权,从而在后端优化过程中抑制动态高斯的影响。5) 不确定性感知的语义分割调度器:根据运动概率的不确定性,按需触发语义分割,从而在需要时提供更精确的动态物体信息。
关键创新:DAGS-SLAM的关键创新在于引入了时空运动概率的概念,并将其用于指导前端跟踪和后端优化。与传统的动态SLAM方法相比,DAGS-SLAM不需要对每一帧都进行昂贵的语义分割,而是根据不确定性按需触发语义分割,从而大大降低了计算成本。此外,DAGS-SLAM还提出了一种不确定性感知的语义分割调度器,可以根据运动概率的不确定性,智能地选择需要进行语义分割的区域,从而进一步提高了计算效率。
关键设计:在运动概率估计模块中,使用了轻量级的YOLO实例分割模型来检测图像中的动态物体。在运动概率时序更新模块中,使用了卡尔曼滤波来融合连续帧之间的观测结果。在动态感知的前端跟踪模块中,使用了运动概率对特征点进行加权,权重与运动概率成反比。在运动概率引导的后端优化模块中,使用了运动概率对3D高斯进行加权,权重与运动概率成反比。不确定性感知的语义分割调度器根据运动概率的方差来判断是否需要进行语义分割,当方差大于某个阈值时,触发语义分割。
🖼️ 关键图片


📊 实验亮点
DAGS-SLAM在公共动态RGB-D基准测试上取得了显著的性能提升。实验结果表明,DAGS-SLAM在保持实时性的同时,提高了重建质量和跟踪鲁棒性。与现有的动态SLAM方法相比,DAGS-SLAM在计算效率方面具有明显的优势,可以在商品GPU上实现实时运行,并且减少了语义分割的调用次数。
🎯 应用场景
DAGS-SLAM适用于计算资源受限的移动机器人和物联网设备,例如扫地机器人、无人机、AR/VR设备等。该系统可以实现动态环境下的实时定位和稠密重建,为这些设备提供更准确的环境感知能力,从而支持更高级的应用,例如导航、避障、场景理解等。未来,该技术有望应用于自动驾驶、智能家居、智慧城市等领域。
📄 摘要(原文)
Mobile robots and IoT devices demand real-time localization and dense reconstruction under tight compute and energy budgets. While 3D Gaussian Splatting (3DGS) enables efficient dense SLAM, dynamic objects and occlusions still degrade tracking and mapping. Existing dynamic 3DGS-SLAM often relies on heavy optical flow and per-frame segmentation, which is costly for mobile deployment and brittle under challenging illumination. We present DAGS-SLAM, a dynamic-aware 3DGS-SLAM system that maintains a spatiotemporal motion probability (MP) state per Gaussian and triggers semantics on demand via an uncertainty-aware scheduler. DAGS-SLAM fuses lightweight YOLO instance priors with geometric cues to estimate and temporally update MP, propagates MP to the front-end for dynamic-aware correspondence selection, and suppresses dynamic artifacts in the back-end via MP-guided optimization. Experiments on public dynamic RGB-D benchmarks show improved reconstruction and robust tracking while sustaining real-time throughput on a commodity GPU, demonstrating a practical speed-accuracy tradeoff with reduced semantic invocations toward mobile deployment.