Efficient Hierarchical Any-Angle Path Planning on Multi-Resolution 3D Grids
作者: Victor Reijgwart, Cesar Cadena, Roland Siegwart, Lionel Ott
分类: cs.RO, cs.AI
发布日期: 2026-02-24
备注: 12 pages, 9 figures, 4 tables, accepted to RSS 2025, code is open-source: https://github.com/ethz-asl/wavestar
期刊: Proceedings of Robotics: Science and Systems 2025
DOI: 10.15607/RSS.2025.XXI.049
💡 一句话要点
提出一种高效的分层多分辨率三维栅格任意角度路径规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 路径规划 多分辨率栅格地图 任意角度规划 机器人导航 三维环境
📋 核心要点
- 现有路径规划方法在利用多分辨率地图的连通性信息方面存在不足,或者在大规模高分辨率地图中面临计算效率瓶颈。
- 该方法利用多分辨率表示,结合任意角度规划的优点,在保证最优性和完备性的前提下,提升了计算效率。
- 实验结果表明,该方法在真实和合成环境中均表现出优异的性能,在解决方案质量和速度上超越了现有方法。
📝 摘要(中文)
本文提出了一种在多分辨率三维栅格地图上进行高效分层任意角度路径规划的方法。多分辨率体素地图常用于表示大型复杂环境,能够高效地捕捉环境的占据和连通性信息。然而,常用的路径规划方法,如采样和轨迹优化,没有充分利用这种显式的连通性信息;而诸如A*等搜索方法在大规模高分辨率地图中面临可扩展性问题。在许多应用中,欧几里得最短路径是导航系统的基础。对于这些应用,任意角度规划方法通过直线连接障碍物角点来寻找最优路径,提供了一种简单而有效的解决方案。本文提出的方法兼具任意角度规划器的最优性和完备性,同时通过利用多分辨率表示克服了搜索方法常见的计算复杂性问题。在真实和合成环境中的大量实验表明,该方法在解决方案质量和速度方面均优于现有方法,甚至超过了基于采样的方法。该框架已开源,以供机器人和规划社区在此基础上进行研究。
🔬 方法详解
问题定义:论文旨在解决在大规模三维环境中,如何高效地找到接近最优的路径规划问题。现有方法,如A*算法,在高分辨率地图中计算量巨大,难以满足实时性要求;而采样方法虽然速度快,但难以保证路径的最优性。因此,需要一种既能利用环境的连通性信息,又能保证计算效率的路径规划方法。
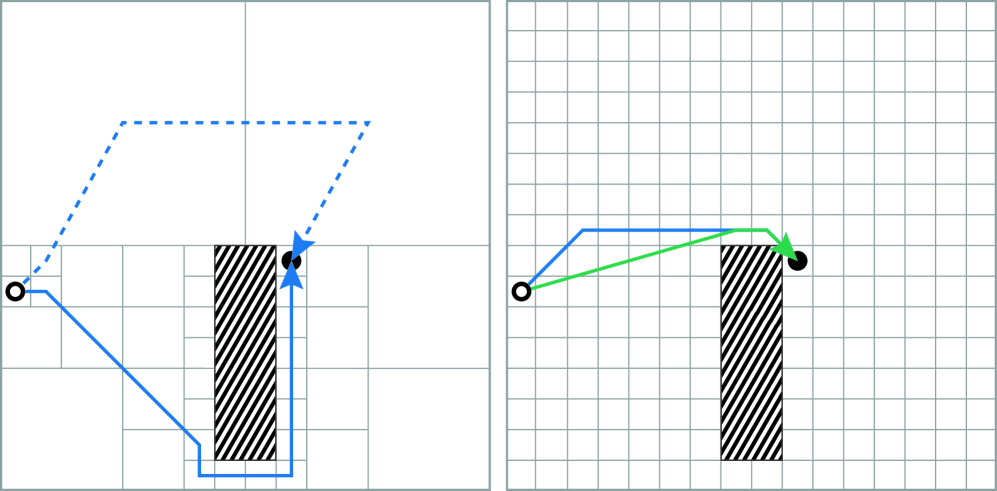
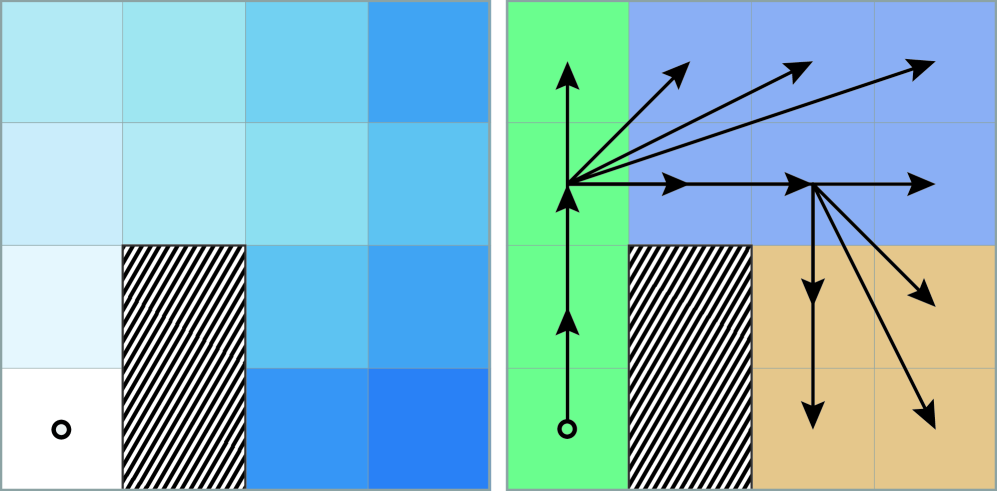
核心思路:论文的核心思路是利用多分辨率栅格地图的分层结构,在低分辨率下进行粗略搜索,然后在高分辨率下进行精细调整,从而在计算效率和路径质量之间取得平衡。同时,采用任意角度规划,允许路径以任意角度穿过栅格,避免了传统栅格搜索算法只能沿栅格边沿移动的限制,从而获得更短、更优的路径。
技术框架:该方法主要包含以下几个阶段:1) 构建多分辨率三维栅格地图;2) 在低分辨率地图上使用A*算法进行粗略路径搜索;3) 将粗略路径投影到高分辨率地图上;4) 在高分辨率地图上,使用任意角度路径规划算法对路径进行优化,生成最终路径。
关键创新:该方法最重要的创新点在于将多分辨率表示与任意角度路径规划相结合。多分辨率表示降低了搜索空间的大小,提高了搜索效率;任意角度路径规划则允许路径以任意角度穿过栅格,从而获得更短、更优的路径。这种结合克服了传统搜索算法的计算复杂性和路径质量问题。
关键设计:该方法的关键设计包括:1) 多分辨率地图的构建方式,需要平衡地图的大小和精度;2) 粗略路径搜索算法的选择,需要考虑搜索效率和路径质量;3) 任意角度路径规划算法的实现,需要考虑计算复杂度和路径平滑性。具体参数设置和损失函数等细节在论文中未明确给出,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文在真实和合成环境中进行了大量实验,结果表明该方法在解决方案质量和速度方面均优于现有方法,甚至超过了基于采样的方法。具体的性能数据和提升幅度在摘要中未给出,属于未知信息。但强调了该方法在效率和质量上的优越性。
🎯 应用场景
该研究成果可广泛应用于机器人导航、自动驾驶、无人机路径规划等领域。尤其是在复杂、大规模的三维环境中,例如城市环境、室内环境、矿区等,该方法能够提供高效、可靠的路径规划方案,具有重要的实际应用价值和广阔的应用前景。未来,该方法可以进一步扩展到动态环境和多智能体路径规划等更复杂场景。
📄 摘要(原文)
Hierarchical, multi-resolution volumetric mapping approaches are widely used to represent large and complex environments as they can efficiently capture their occupancy and connectivity information. Yet widely used path planning methods such as sampling and trajectory optimization do not exploit this explicit connectivity information, and search-based methods such as A* suffer from scalability issues in large-scale high-resolution maps. In many applications, Euclidean shortest paths form the underpinning of the navigation system. For such applications, any-angle planning methods, which find optimal paths by connecting corners of obstacles with straight-line segments, provide a simple and efficient solution. In this paper, we present a method that has the optimality and completeness properties of any-angle planners while overcoming computational tractability issues common to search-based methods by exploiting multi-resolution representations. Extensive experiments on real and synthetic environments demonstrate the proposed approach's solution quality and speed, outperforming even sampling-based methods. The framework is open-sourced to allow the robotics and planning community to build on our research.