Surface-based Manipulation Using Tunable Compliant Porous-Elastic Soft Sensing
作者: Gayatri Indukumar, Muhammad Awais, Diana Cafiso, Matteo Lo Preti, Lucia Beccai
分类: cs.RO
发布日期: 2026-02-24
备注: 6 pages, 6 figures, 1 table, to be published in RoboSoft 2026 proceedings
💡 一句话要点
提出基于可调多孔弹性软传感的表面操作方法,实现柔顺精确的物体操控。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 表面操作 柔顺性 触觉传感 多孔弹性结构
📋 核心要点
- 现有的表面操作系统缺乏柔顺性和触觉反馈,难以实现对各种物体的轻柔、精确处理。
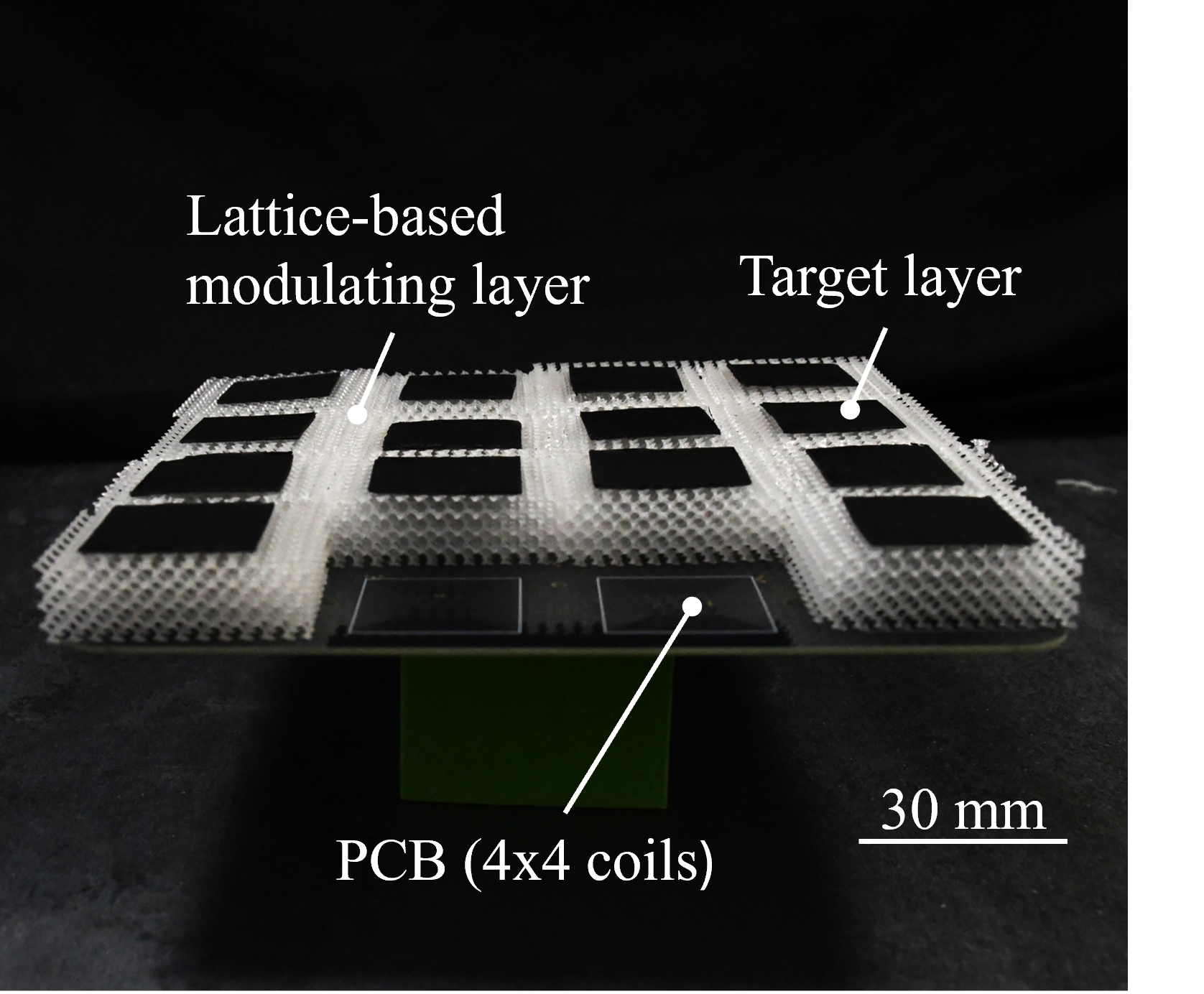
- 论文提出COPESS方法,通过可调晶格层同时调节机械柔顺性和传感性能,实现自适应物体操控。
- 实验结果表明,调整晶格密度可显著改变灵敏度和操作力范围,验证了该方法的可行性。
📝 摘要(中文)
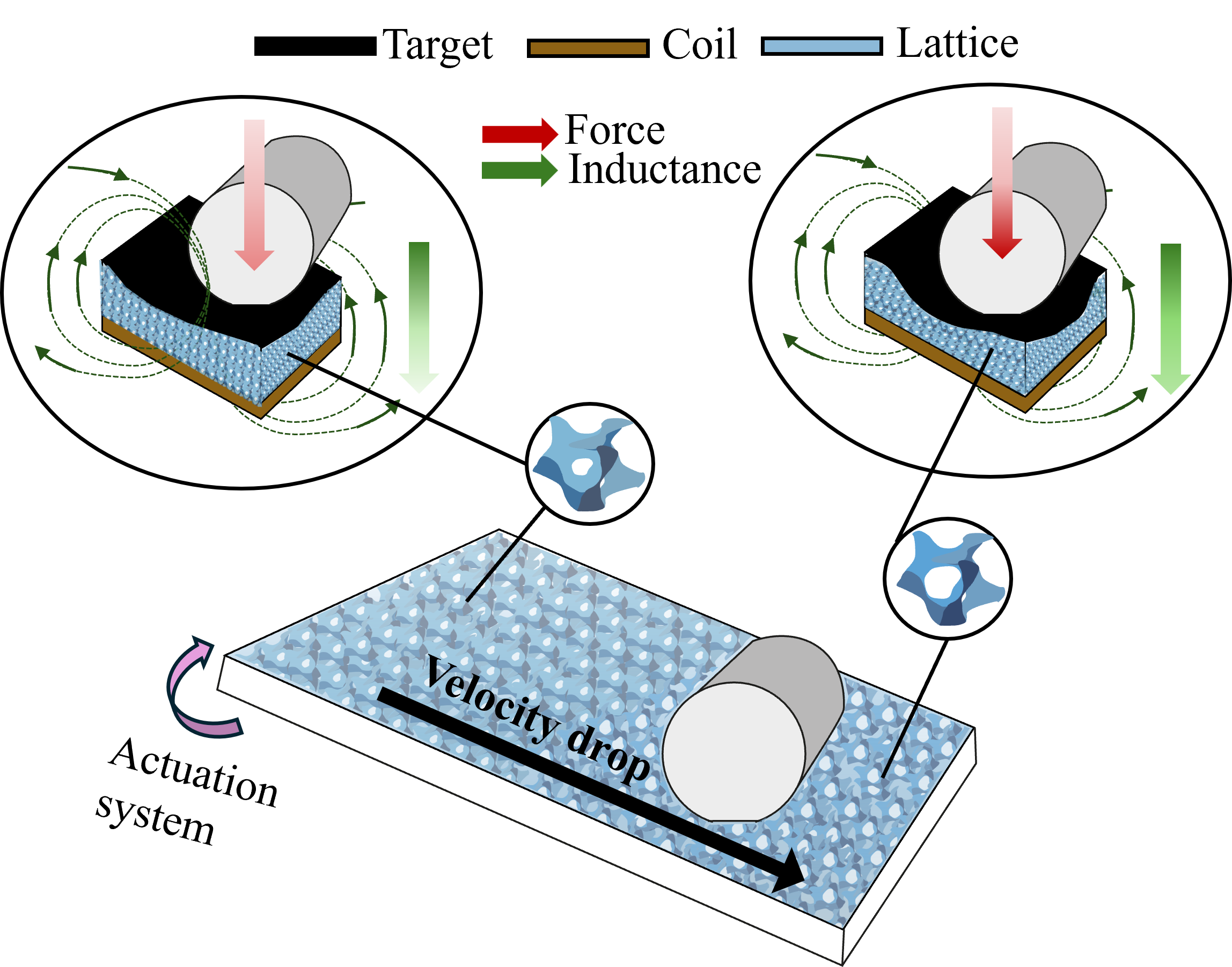
本文提出了一种集成了电感传感器的柔顺多孔弹性软传感(COPESS)方法,用于自适应物体操控和局部传感。该设计采用可调的晶格层,可以同时调节机械柔顺性和传感性能。通过调整晶格几何形状,可以定制刚度和传感器响应,以处理具有不同机械性能的物体。实验表明,通过简单地调整一个参数,即晶格密度,从7%到20%,可以显著改变灵敏度和操作力范围(分别约为-23倍和9倍)。该方法为创建自适应、传感器化表面奠定了基础,在该表面上,机械和传感特性得到协同优化,从而实现被动但可编程的精细操作。
🔬 方法详解
问题定义:现有表面操作系统在处理多样化物体时,缺乏足够的柔顺性和触觉反馈,容易对物体造成损伤,限制了其应用范围。因此,需要一种既能提供柔顺性,又能进行精确触觉感知的表面操作方法。
核心思路:论文的核心思路是设计一种可调的多孔弹性软传感结构(COPESS),通过改变其内部晶格的几何参数,可以同时调节结构的机械柔顺性和传感性能。这种设计使得操作表面能够根据物体的特性进行自适应调整,从而实现更安全、更精确的操控。
技术框架:该方法主要包含以下几个关键模块:1)可调晶格结构设计:设计具有不同晶格密度的多孔弹性结构;2)电感传感器集成:将电感传感器嵌入到多孔弹性结构中,用于感知接触力;3)控制与反馈:通过调整晶格密度,实现对机械柔顺性和传感性能的协同优化,并利用传感器反馈进行闭环控制。
关键创新:该方法最重要的创新点在于将机械柔顺性和传感性能集成到一个可调的多孔弹性结构中,并通过调整晶格几何参数实现对这两种性能的协同优化。这与传统方法中将柔顺性和传感功能分开设计的方式有本质区别,能够更好地适应不同物体的操作需求。
关键设计:关键设计包括:1)晶格结构的几何参数选择:通过有限元分析等方法,确定晶格密度、单元尺寸等参数对机械柔顺性和传感性能的影响;2)电感传感器的布局:优化电感传感器在多孔弹性结构中的位置,以获得最佳的传感灵敏度和空间分辨率;3)控制算法设计:设计合适的控制算法,根据传感器反馈动态调整操作力,实现精确的物体操控。
🖼️ 关键图片

📊 实验亮点
实验结果表明,通过将晶格密度从7%调整到20%,COPESS结构的灵敏度提高了约-23倍,操作力范围扩大了约9倍。这表明该方法能够显著改变操作表面的机械和传感特性,使其能够适应不同物体的操作需求。此外,实验还验证了该方法在物体抓取和放置方面的有效性。
🎯 应用场景
该研究成果可应用于医疗机器人、食品处理、精密装配等领域。在医疗领域,可用于进行微创手术或辅助康复训练,实现对人体组织的轻柔操作。在食品处理领域,可用于对易碎食品进行分拣和包装,减少破损率。在精密装配领域,可用于对微小零件进行精确装配,提高生产效率和产品质量。
📄 摘要(原文)
There is a growing need for soft robotic platforms that perform gentle, precise handling of a wide variety of objects. Existing surface-based manipulation systems, however, lack the compliance and tactile feedback needed for delicate handling. This work introduces the COmpliant Porous-Elastic Soft Sensing (COPESS) integrated with inductive sensors for adaptive object manipulation and localised sensing. The design features a tunable lattice layer that simultaneously modulates mechanical compliance and sensing performance. By adjusting lattice geometry, both stiffness and sensor response can be tailored to handle objects with varying mechanical properties. Experiments demonstrate that by easily adjusting one parameter, the lattice density, from 7 % to 20 %, it is possible to significantly alter the sensitivity and operational force range (about -23x and 9x, respectively). This approach establishes a blueprint for creating adaptive, sensorized surfaces where mechanical and sensory properties are co-optimized, enabling passive, yet programmable, delicate manipulation.