A Robotic Testing Platform for Pipelined Discovery of Resilient Soft Actuators
作者: Ang, Li, Alexander Yin, Alexander White, Sahib Sandhu, Matthew Francoeur, Victor Jimenez-Santiago, Van Remenar, Codrin Tugui, Mihai Duduta
分类: cs.RO
发布日期: 2026-02-24
💡 一句话要点
提出基于机器人测试平台的介电弹性体驱动器寿命优化流水线
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 介电弹性体驱动器 软体机器人 机器人测试平台 自动化测试 寿命优化
📋 核心要点
- 介电弹性体驱动器(DEA)寿命短是其在机器人领域应用的主要瓶颈,传统测试方法效率低,难以应对高维参数空间。
- 论文提出一种基于机器人测试平台的优化流水线,通过自动化测试加速DEA寿命扫描和参数优化。
- 实验结果表明,优化后的DEA寿命提升高达100%,并成功应用于四足机器人,验证了方案的有效性。
📝 摘要(中文)
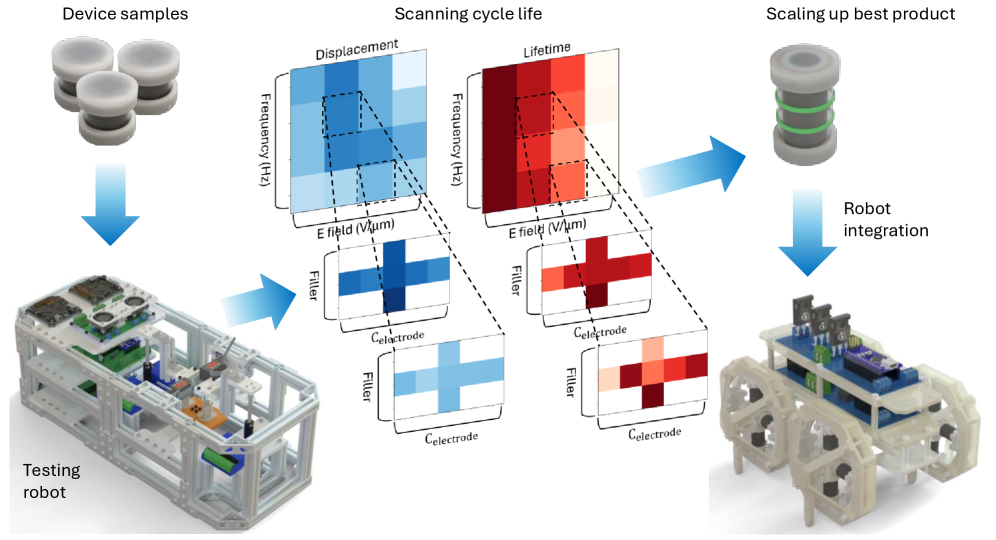
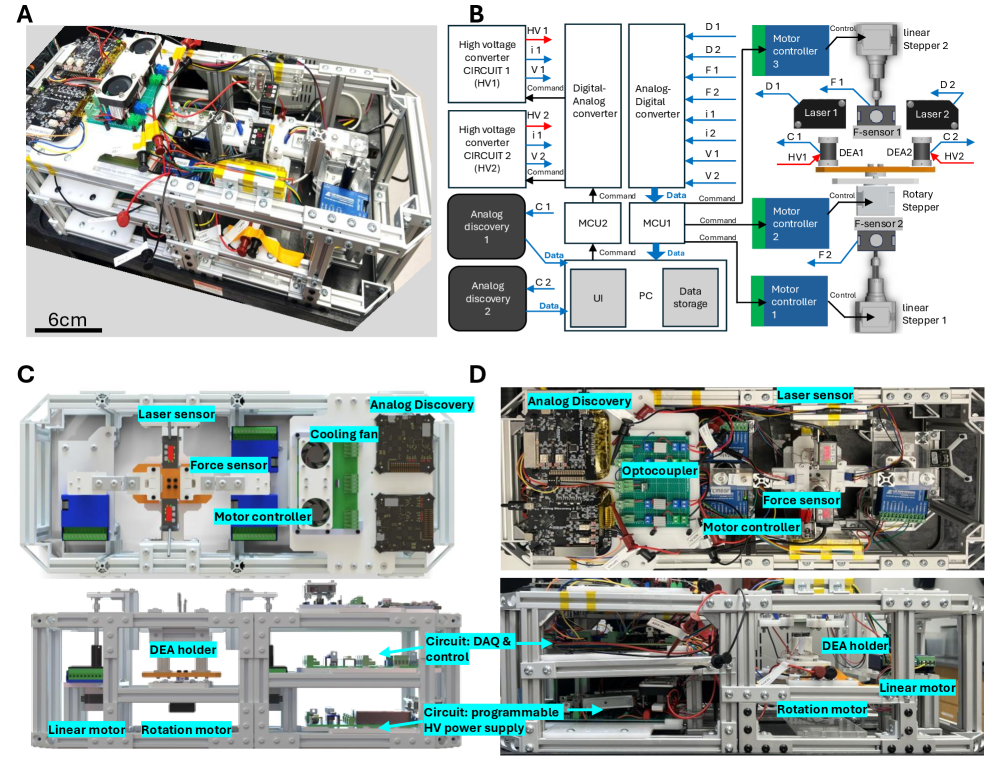
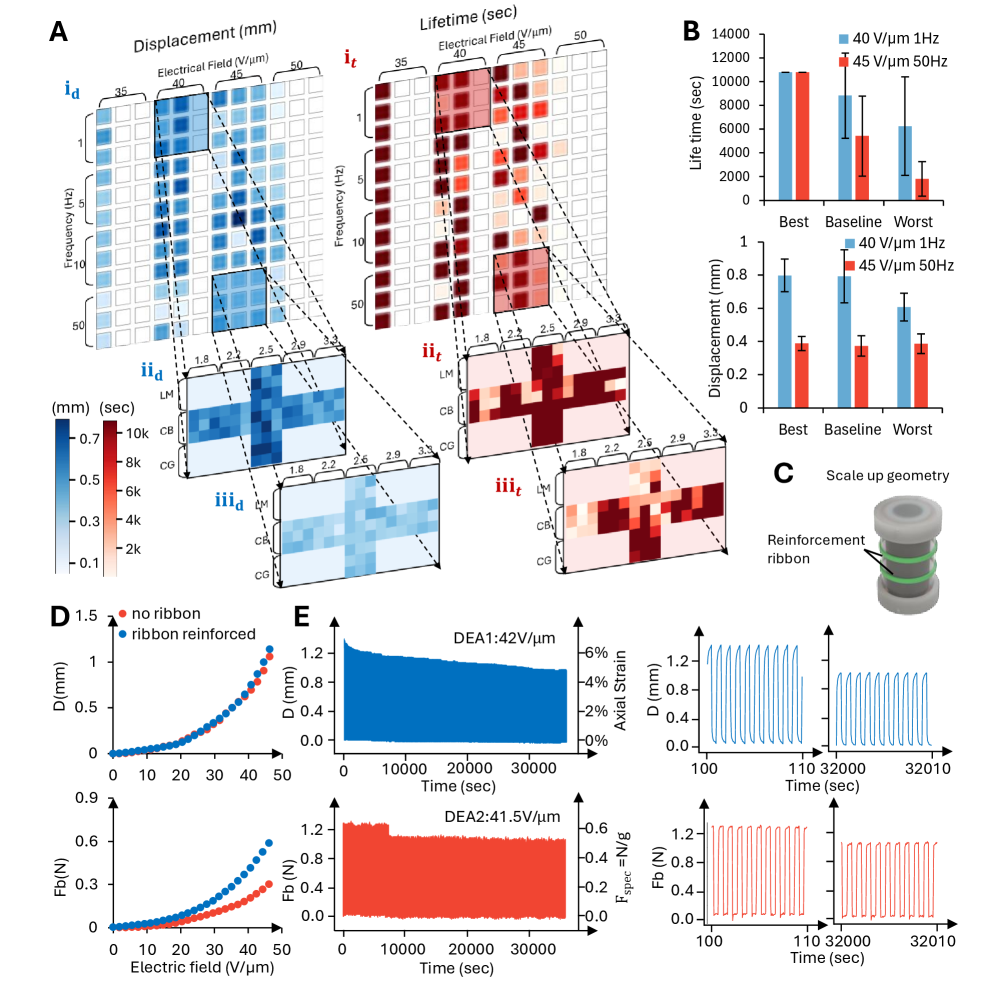
线性介电弹性体驱动器(DEA)在高电场下的短寿命限制了其在机器人领域的广泛应用。由于单样本测试耗时和影响性能的高维参数空间,系统扫描非常困难。为了解决这个问题,我们提出了一种由新型测试机器人驱动的优化流水线,该机器人能够扫描DEA的寿命。该机器人集成了机电性能测量、可编程电压输入和多通道测试能力。利用它,我们扫描了基于Elastosil的线性驱动器在输入电压幅度、频率、电极材料浓度和电气连接填充剂等参数下的寿命。最佳参数组合将边界操作条件下的运行寿命提高了高达100%,并随后进行了放大,以实现更高的力和位移输出。最终产品在模块化、可扩展的四足步行机器人上展示了弹性,具有有效载荷能力(>其无束缚自重的100%,以及>组合驱动器重量的700%)。这项工作首次将自动驾驶实验室方法引入机器人驱动器设计。
🔬 方法详解
问题定义:线性介电弹性体驱动器(DEA)在高电场下的寿命短是制约其在机器人领域广泛应用的关键问题。传统的DEA测试方法依赖于人工操作,效率低下,难以在高维参数空间中进行系统性的扫描和优化。此外,不同参数组合对DEA寿命的影响机制尚不明确,缺乏有效的指导策略。
核心思路:论文的核心思路是构建一个自动化的机器人测试平台,实现DEA寿命的快速、精确测量和参数优化。通过机器人集成机电性能测量、可编程电压输入和多通道测试能力,可以高效地扫描不同参数组合下的DEA寿命,并利用优化算法找到最佳参数配置,从而显著提升DEA的可靠性和性能。
技术框架:该方法的整体框架包含以下几个主要模块:1) 机器人测试平台:负责自动化地进行DEA的寿命测试,包括施加电压、测量位移和记录失效时间等。2) 参数空间定义:确定影响DEA寿命的关键参数,如电压幅度、频率、电极材料浓度和电气连接填充剂等。3) 优化算法:利用优化算法(具体算法未知)搜索最佳参数组合,以最大化DEA的寿命。4) 性能验证:将优化后的DEA应用于实际机器人系统,验证其性能和可靠性。
关键创新:该论文最重要的技术创新在于将自动驾驶实验室(self-driving lab)的概念引入到机器人驱动器的设计中。通过构建自动化的测试平台和优化流水线,可以显著加速DEA的研发过程,并发现传统方法难以找到的最佳参数组合。这是首次将这种自动化优化方法应用于机器人驱动器领域。
关键设计:论文中提到了一些关键设计,包括:1) 电压输入的可编程控制,可以模拟不同的工作条件。2) 多通道测试能力,可以同时测试多个DEA,提高测试效率。3) 电极材料浓度和电气连接填充剂的选择,这些材料对DEA的性能和寿命有重要影响。具体的参数设置、损失函数和网络结构等技术细节在论文中没有详细描述,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,通过机器人测试平台和优化流水线,找到了显著提升DEA寿命的参数组合,在边界操作条件下,DEA的运行寿命提升了高达100%。优化后的DEA成功应用于四足步行机器人,并实现了超过自身重量100%的有效载荷能力,以及超过驱动器总重量700%的有效载荷能力,验证了优化方案的有效性。
🎯 应用场景
该研究成果可广泛应用于软体机器人、医疗机器人、可穿戴设备等领域。通过优化介电弹性体驱动器的寿命和性能,可以提高这些设备的可靠性和实用性,拓展其应用范围。此外,该自动驾驶实验室方法也可推广到其他机器人部件的设计和优化,加速机器人技术的整体发展。
📄 摘要(原文)
Short lifetime under high electrical fields hinders the widespread robotic application of linear dielectric elastomer actuators (DEAs). Systematic scanning is difficult due to time-consuming per-sample testing and the high-dimensional parameter space affecting performance. To address this, we propose an optimization pipeline enabled by a novel testing robot capable of scanning DEA lifetime. The robot integrates electro-mechanical property measurement, programmable voltage input, and multi-channel testing capacity. Using it, we scanned the lifetime of Elastosil-based linear actuators across parameters including input voltage magnitude, frequency, electrode material concentration, and electrical connection filler. The optimal parameter combinations improved operational lifetime under boundary operating conditions by up to 100% and were subsequently scaled up to achieve higher force and displacement output. The final product demonstrated resilience on a modular, scalable quadruped walking robot with payload carrying capacity (>100% of its untethered body weight, and >700% of combined actuator weight). This work is the first to introduce a self-driving lab approach into robotic actuator design.