Computer-Aided Design of Rational Motions for 4R and 6R Spatial Mechanism Synthesis
作者: Daniel Huczala, Severinas Zube, Martin Pfurner, Johannes Siegele, Frank C. Park
分类: cs.RO
发布日期: 2026-02-24
💡 一句话要点
提出基于三次四元数Bezier曲线的七点插值方案,用于4R和6R空间机构的计算机辅助设计。
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 空间机构综合 有理运动 四元数Bezier曲线 计算机辅助设计 运动生成 六杆机构 开源工具
📋 核心要点
- 现有有理运动综合方法在处理复杂空间任务时存在局限性,难以精确控制机构运动轨迹。
- 提出基于三次四元数Bezier曲线的插值方案,通过控制曲线形状实现对空间运动轨迹的精确控制。
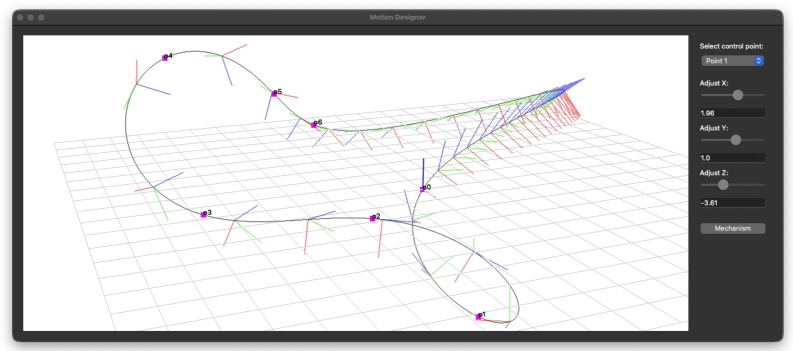
- 开发开源CAD工具,支持多种运动生成和机构综合方法,并提供快速可视化评估,方便工程应用。
📝 摘要(中文)
本文关注于生成有理运动的几何方法,该方法用于设计单环有理连杆机构,这是一种能够执行指定空间任务的单自由度机构。在已建立的有理运动综合方法的基础上,我们引入了一种新的基于三次四元数Bezier曲线的七个3D点插值方案。由此产生的运动允许分解,即合成一个空间六杆机构,其工具坐标系通过指定的七个点。为了支持工程实践,我们提供了开源CAD工具,这些工具也实现了其他方法,并提供了运动生成和机构合成的快速可视化评估。
🔬 方法详解
问题定义:论文旨在解决空间机构综合中的运动生成问题,特别是针对4R和6R空间机构,如何生成满足特定空间任务需求的有理运动。现有方法在处理复杂空间轨迹时,难以保证运动的光滑性和精确性,并且缺乏易于使用的CAD工具支持。
核心思路:论文的核心思路是利用三次四元数Bezier曲线进行空间运动的插值。四元数能够有效地表示空间旋转,而Bezier曲线则提供了灵活的形状控制能力。通过调整Bezier曲线的控制点,可以生成满足特定空间点约束的光滑有理运动。
技术框架:该方法主要包含以下几个阶段:1) 定义空间任务,即指定机构工具坐标系需要通过的七个3D点。2) 使用三次四元数Bezier曲线对这七个点进行插值,生成一条空间运动轨迹。3) 对生成的运动进行分解,得到一个空间六杆机构。4) 使用开源CAD工具对运动生成和机构综合进行可视化评估。
关键创新:该方法最重要的创新点在于提出了基于三次四元数Bezier曲线的七点插值方案。与传统的插值方法相比,该方法能够更好地处理空间旋转,并生成更光滑、更精确的运动轨迹。此外,开源CAD工具的开发也极大地提高了该方法的实用性。
关键设计:三次四元数Bezier曲线的关键在于控制点的选择。论文可能涉及了如何根据给定的空间点约束,优化选择控制点,以生成满足特定要求的运动轨迹。具体的优化算法和参数设置在论文中可能有所描述,但摘要中未提及具体细节。
🖼️ 关键图片

📊 实验亮点
论文的主要亮点在于提出了一种新的基于三次四元数Bezier曲线的七点插值方案,并开发了相应的开源CAD工具。该方案能够生成满足特定空间点约束的光滑有理运动,并允许分解为空间六杆机构。开源CAD工具提供了运动生成和机构综合的快速可视化评估,极大地提高了该方法的实用性。具体的性能数据和对比基线未知。
🎯 应用场景
该研究成果可应用于机器人、自动化设备、医疗器械等领域,用于设计能够执行复杂空间任务的机构。例如,可以用于设计手术机器人,使其能够精确地到达手术部位并执行操作;也可以用于设计自动化生产线上的机械臂,使其能够高效地完成装配任务。开源CAD工具的提供,将加速该技术的推广和应用。
📄 摘要(原文)
This paper focuses on geometric methods for generating rational motions used in the design of single-loop rational linkages, 1-degree-of-freedom mechanisms that can execute prescribed spatial tasks. Building on established rational motion synthesis methods, we introduce a new interpolation scheme for seven 3D points based on cubic quaternionic Bezier curves. The resulting motion admits factorization, i.e. the synthesis of a spatial six-bar mechanism whose tool frame passes the specified seven points. To support engineering practice, we provide open-source CAD tools that implement also the other methods and provide fast visual evaluation of motion generation and mechanism synthesis.