KCFRC: Kinematic Collision-Aware Foothold Reachability Criteria for Legged Locomotion
作者: Lei Ye, Haibo Gao, Huaiguang Yang, Peng Xu, Haoyu Wang, Tie Liu, Junqi Shan, Zongquan Deng, Liang Ding
分类: cs.RO
发布日期: 2026-02-24
💡 一句话要点
提出KCFRC算法,解决腿足机器人运动中高效防碰撞足点可达性验证问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 腿足机器人 足点规划 可达性分析 碰撞检测 运动学 轨迹优化 接触规划
📋 核心要点
- 现有腿足机器人足点选择方法缺乏对无碰撞摆动轨迹存在性的有效验证,限制了其在复杂环境中的应用。
- 论文提出KCFRC算法,通过建立足点可达性的充分条件,实现高效的足点可达性实时验证。
- 实验表明,KCFRC算法显著提升了足点可达性验证效率,并能加速轨迹优化,增强机器人在狭小空间内的适应性。
📝 摘要(中文)
腿足机器人在复杂环境中导航面临巨大挑战,需要实时精确地进行足点选择和接触规划。现有研究主要集中于基于地形几何或运动学的足点选择方法,但缺乏对无碰撞摆动轨迹存在性的有效验证。本文提出了KCFRC算法,一种高效的足点可达性分析方法。首先,我们正式定义了足点可达性问题,并建立了足点可达性的充分条件。基于此,我们开发了KCFRC算法,使机器人能够实时验证足点可达性。实验结果表明,KCFRC具有显著的时间效率,在平均2毫秒内完成单个腿在900个潜在足点上的可达性检查。此外,我们证明了KCFRC可以加速轨迹优化,尤其有利于在狭小空间内的接触规划,从而提高腿足机器人在复杂环境中的适应性和鲁棒性。
🔬 方法详解
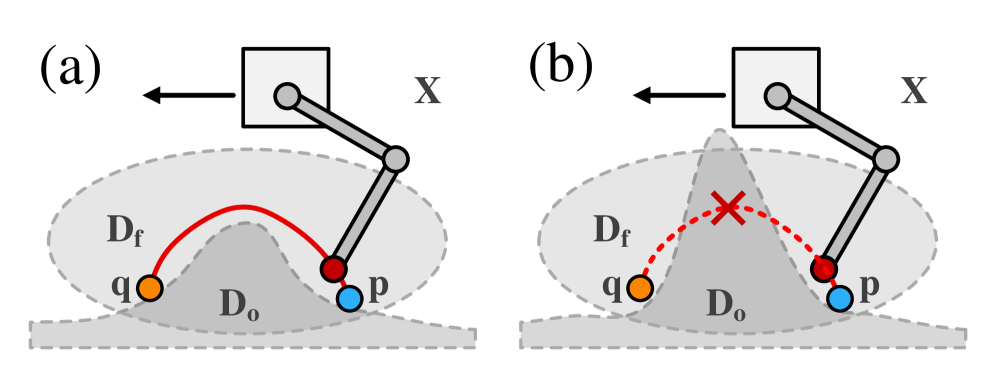
问题定义:论文旨在解决腿足机器人运动规划中,如何高效验证潜在足点是否可达,且在摆动过程中不会发生碰撞的问题。现有方法在验证足点可达性时,计算复杂度高,难以满足实时性要求,尤其是在复杂地形或狭小空间中。
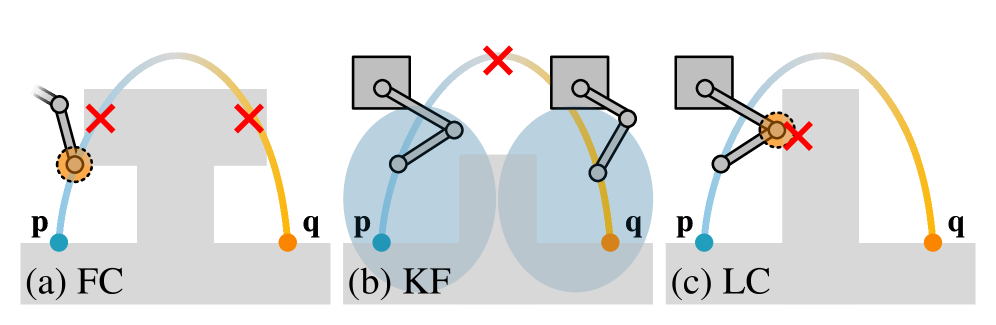
核心思路:论文的核心思路是建立足点可达性的充分条件,避免直接进行复杂的碰撞检测和轨迹规划。通过分析腿部的运动学约束和环境几何信息,推导出能够快速判断足点是否可达的判据。这样可以将复杂的轨迹规划问题转化为简单的条件判断问题,从而提高计算效率。
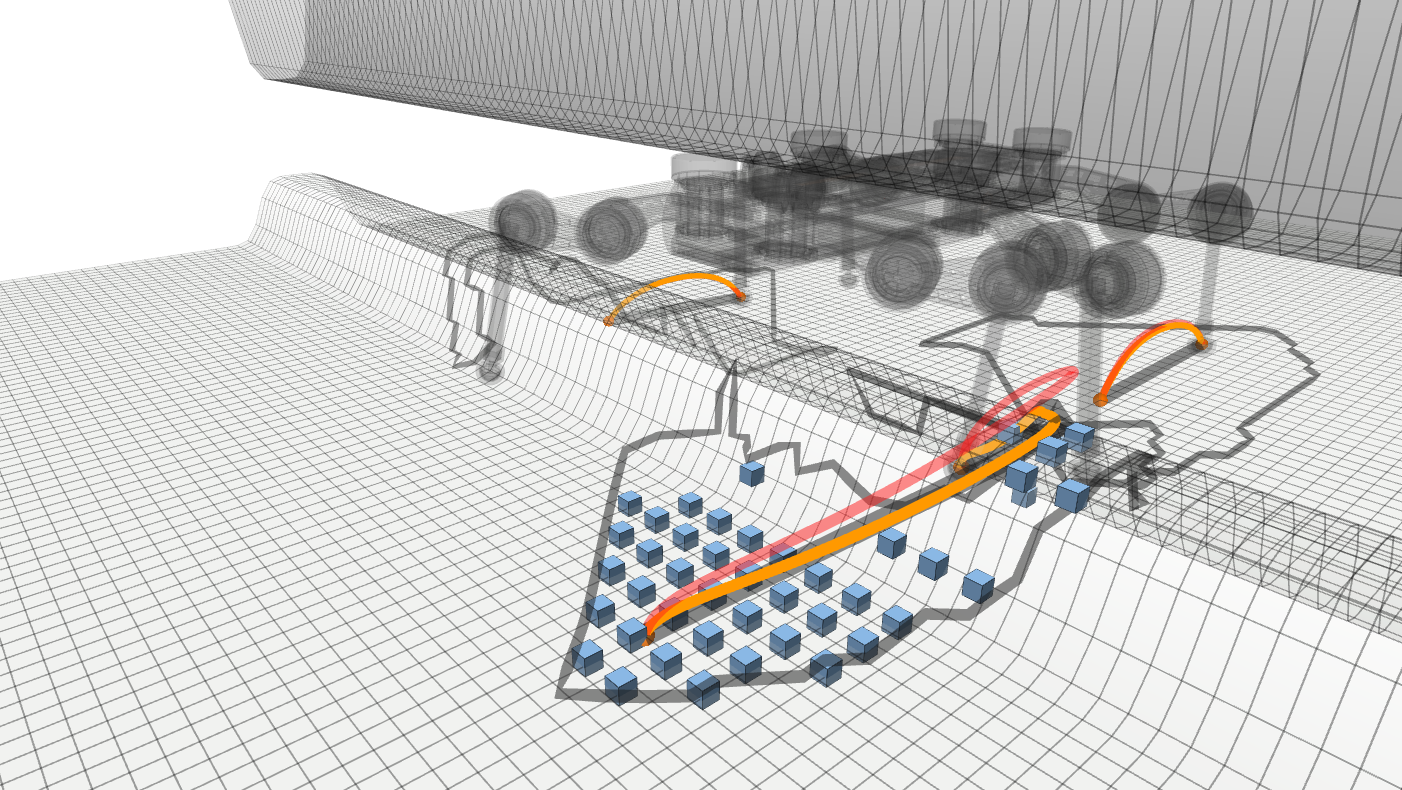
技术框架:KCFRC算法主要包含以下几个阶段:1) 环境感知:获取周围环境的几何信息,例如地形高度图或点云数据。2) 潜在足点生成:根据环境信息和机器人运动学约束,生成一系列潜在的足点。3) 足点可达性验证:利用KCFRC算法,快速验证每个潜在足点是否可达,并排除不可达的足点。4) 轨迹优化或接触规划:基于可达的足点,进行轨迹优化或接触规划,生成最终的运动轨迹。
关键创新:KCFRC算法的关键创新在于提出了基于运动学的碰撞感知足点可达性判据。与现有方法相比,KCFRC避免了直接进行碰撞检测和轨迹规划,而是通过分析腿部的运动学约束和环境几何信息,推导出足点可达的充分条件。这种方法能够显著降低计算复杂度,提高验证效率。
关键设计:KCFRC算法的关键设计包括:1) 足点可达性充分条件的推导,需要仔细分析腿部的运动学约束,并考虑环境几何信息的影响。2) 算法的实现需要高效的数据结构和算法,例如KD树或八叉树,用于快速查询环境几何信息。3) 算法的参数设置,例如安全距离阈值,需要根据具体的机器人和环境进行调整。
🖼️ 关键图片
📊 实验亮点
实验结果表明,KCFRC算法在足点可达性验证方面具有显著的时间效率,平均仅需2毫秒即可完成单个腿在900个潜在足点上的验证。这比传统的碰撞检测方法快几个数量级。此外,实验还证明了KCFRC算法可以加速轨迹优化,并提高腿足机器人在狭小空间内的适应性和鲁棒性。该算法为腿足机器人在复杂环境中的应用奠定了基础。
🎯 应用场景
该研究成果可应用于各种腿足机器人,尤其是在复杂地形、狭小空间或动态环境中。例如,搜救机器人可以在灾难现场快速评估地形,选择安全可靠的足点;工业机器人可以在拥挤的工厂环境中灵活移动,完成各种任务;外骨骼机器人可以辅助行动不便的人群,提供安全稳定的行走支持。该研究还有助于提升腿足机器人的自主性和智能化水平。
📄 摘要(原文)
Legged robots face significant challenges in navigating complex environments, as they require precise real-time decisions for foothold selection and contact planning. While existing research has explored methods to select footholds based on terrain geometry or kinematics, a critical gap remains: few existing methods efficiently validate the existence of a non-collision swing trajectory. This paper addresses this gap by introducing KCFRC, a novel approach for efficient foothold reachability analysis. We first formally define the foothold reachability problem and establish a sufficient condition for foothold reachability. Based on this condition, we develop the KCFRC algorithm, which enables robots to validate foothold reachability in real time. Our experimental results demonstrate that KCFRC achieves remarkable time efficiency, completing foothold reachability checks for a single leg across 900 potential footholds in an average of 2 ms. Furthermore, we show that KCFRC can accelerate trajectory optimization and is particularly beneficial for contact planning in confined spaces, enhancing the adaptability and robustness of legged robots in challenging environments.