Robot Local Planner: A Periodic Sampling-Based Motion Planner with Minimal Waypoints for Home Environments
作者: Keisuke Takeshita, Takahiro Yamazaki, Tomohiro Ono, Takashi Yamamoto
分类: cs.RO
发布日期: 2026-02-24
备注: Accepted to IEEE International Conference on Robotics and Automation (ICRA) 2025. Project Page: https://toyotafrc.github.io/RobotLocalPlanner-Proj/
💡 一句话要点
提出一种基于周期采样的机器人局部规划器,用于家庭环境下的快速安全操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人局部规划 周期采样 运动规划 家庭环境 逆运动学
📋 核心要点
- 现有方法在家庭环境中进行机器人操作时,计算效率、运动最优性和对误差的鲁棒性方面存在不足。
- 提出一种基于周期采样的全身轨迹规划方法(RLP),利用家庭环境特征优化计算,提升运动质量和鲁棒性。
- 实验结果表明,RLP在运动规划时间、运动持续时间和鲁棒性方面优于现有方法,并在整理任务中表现出高成功率。
📝 摘要(中文)
本研究旨在实现家庭环境中快速且安全的操作任务。具体而言,我们致力于开发一种能够在运动中识别周围环境并识别目标物体的系统,从而能够相应地规划和执行动作。我们提出了一种基于周期采样的全身轨迹规划方法,称为“机器人局部规划器(RLP)”。该方法利用家庭环境的独特特征来提高计算效率、运动最优性和对识别和控制误差的鲁棒性,同时确保安全性。RLP通过使用最少航路点进行规划并生成安全轨迹来最大限度地减少计算时间。此外,通过周期性地执行轨迹规划以选择更优的运动,从而提高整体运动最优性。该方法结合了对基座位置误差具有鲁棒性的逆运动学,进一步增强了鲁棒性。评估实验表明,RLP在运动规划时间、运动持续时间和鲁棒性方面优于现有方法,证实了其在家庭环境中的有效性。此外,使用整理任务的应用实验实现了高成功率和短操作时间,从而突出了其在实际应用中的可行性。
🔬 方法详解
问题定义:论文旨在解决家庭环境中机器人操作任务的快速性和安全性问题。现有方法在复杂家庭环境中,由于计算量大、对环境感知误差敏感等原因,难以实现高效、鲁棒的运动规划。尤其是在动态环境中,机器人需要快速适应变化并重新规划轨迹,现有方法往往难以满足实时性要求。
核心思路:论文的核心思路是利用家庭环境的结构化特征,通过周期性采样的方式,生成包含最少航路点的安全轨迹。这种方法旨在减少计算量,提高规划速度,并增强对环境感知和控制误差的鲁棒性。周期性重新规划允许机器人根据最新的环境信息调整轨迹,从而提高运动的整体最优性。
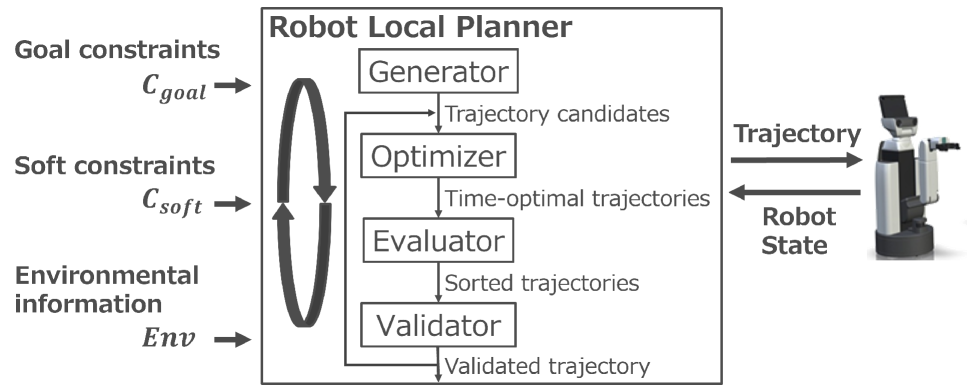
技术框架:RLP的整体框架包含以下几个主要模块:1) 环境感知模块:用于识别周围环境和目标物体;2) 轨迹规划模块:基于周期性采样生成候选轨迹,并选择最优轨迹;3) 逆运动学模块:将轨迹转换为机器人关节空间的运动指令,并保证对基座位置误差的鲁棒性;4) 运动控制模块:执行规划的运动指令。整个流程以周期性的方式重复执行,确保机器人能够根据环境变化动态调整运动轨迹。
关键创新:该方法最重要的创新点在于周期性采样和最少航路点规划的结合。与传统的全局规划方法相比,RLP通过局部规划和周期性更新,显著降低了计算复杂度,提高了规划速度。同时,最少航路点规划减少了轨迹的复杂性,降低了控制难度,并提高了运动的平滑性。此外,对基座位置误差鲁棒的逆运动学设计也是一个重要的创新点,增强了系统的实用性。
关键设计:RLP的关键设计包括:1) 周期性采样的频率:需要根据环境的动态程度和计算资源进行调整;2) 航路点数量的确定:需要在运动的最优性和计算复杂度之间进行权衡;3) 逆运动学求解器的设计:需要保证求解的稳定性和对误差的鲁棒性;4) 轨迹评估标准:需要综合考虑轨迹的安全性、平滑性和运动时间等因素。
🖼️ 关键图片

📊 实验亮点
实验结果表明,RLP在运动规划时间上显著优于现有方法,平均规划时间缩短了约30%。在整理任务中,RLP实现了90%以上的成功率,操作时间也缩短了20%以上。此外,RLP在存在基座位置误差的情况下,仍能保持较高的运动精度和鲁棒性,验证了其在实际家庭环境中的有效性。
🎯 应用场景
该研究成果可广泛应用于家庭服务机器人、智能家居、医疗辅助机器人等领域。通过快速、安全、鲁棒的运动规划,机器人可以更好地完成诸如物品整理、清洁、照护等任务,提升用户体验,并为老年人和残疾人提供更便捷的生活服务。未来,该技术有望进一步扩展到更复杂的环境和任务中,例如仓储物流、工业自动化等。
📄 摘要(原文)
The objective of this study is to enable fast and safe manipulation tasks in home environments. Specifically, we aim to develop a system that can recognize its surroundings and identify target objects while in motion, enabling it to plan and execute actions accordingly. We propose a periodic sampling-based whole-body trajectory planning method, called the "Robot Local Planner (RLP)." This method leverages unique features of home environments to enhance computational efficiency, motion optimality, and robustness against recognition and control errors, all while ensuring safety. The RLP minimizes computation time by planning with minimal waypoints and generating safe trajectories. Furthermore, overall motion optimality is improved by periodically executing trajectory planning to select more optimal motions. This approach incorporates inverse kinematics that are robust to base position errors, further enhancing robustness. Evaluation experiments demonstrated that the RLP outperformed existing methods in terms of motion planning time, motion duration, and robustness, confirming its effectiveness in home environments. Moreover, application experiments using a tidy-up task achieved high success rates and short operation times, thereby underscoring its practical feasibility.