Scalable Low-Density Distributed Manipulation Using an Interconnected Actuator Array
作者: Bailey Dacre, Rodrigo Moreno, Jørn Lambertsen, Kasper Stoy, Andrés Faíña
分类: cs.RO
发布日期: 2026-02-23
💡 一句话要点
提出基于互连执行器阵列的可扩展低密度分布式操作方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 分布式操作 机器人阵列 柔性表面 低密度执行器 物体操作
📋 核心要点
- 现有分布式操作器系统需要密集的执行器阵列才能有效操作小型物体,成本高昂。
- 本文提出一种基于柔性互连的低密度执行器阵列,降低了执行器密度,同时保持了操作能力。
- 实验验证了该方法在2x2原型上的有效性,能够操作不同形状和大小的物体。
📝 摘要(中文)
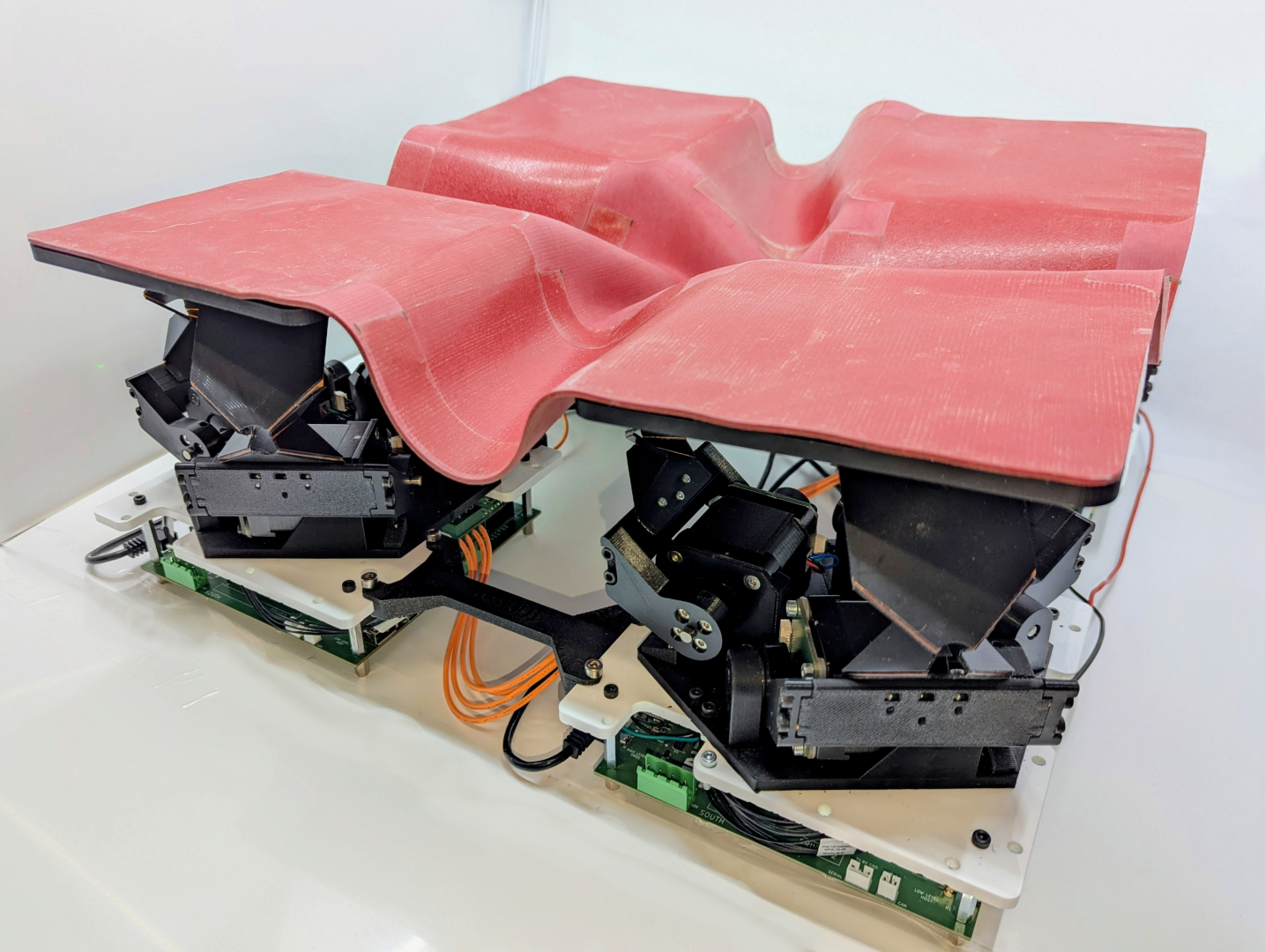
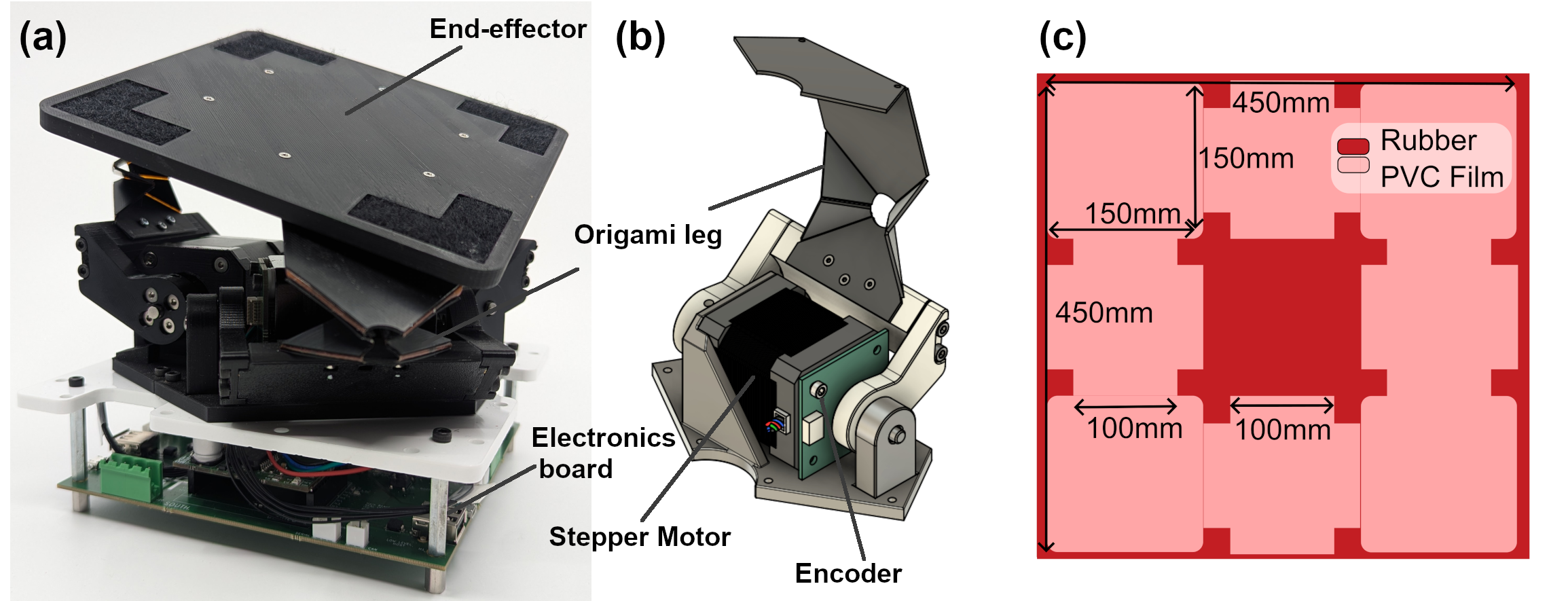
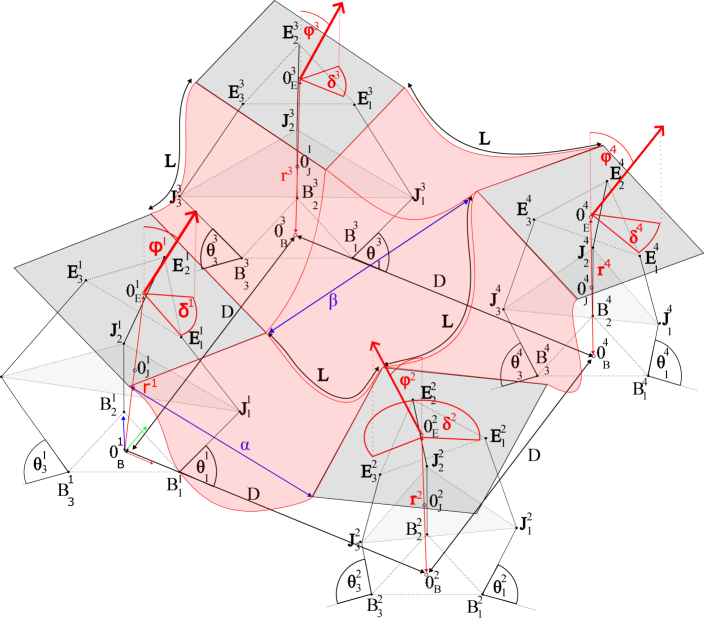
本文提出了一种分布式操作器系统,该系统由模块化的3自由度机器人瓦片组成,这些瓦片通过柔性表面层互连,形成连续可控的操作表面。该柔性层允许更大的执行器间距,同时不影响物体操作能力,从而显著降低了执行器密度,同时保持了强大的控制能力,即使对于较小的物体也是如此。我们描述了阵列的耦合工作空间,并开发了一种能够将物体平移到N X N阵列中任意位置的操作策略。该方法通过一个最小的2 X 2原型进行了实验验证,证明了成功操作各种形状和大小的物体。
🔬 方法详解
问题定义:现有的分布式操作器系统为了有效操作小型物体,需要密集的执行器阵列。这种高密度的设计增加了系统的复杂性和成本,限制了其可扩展性。因此,如何在降低执行器密度的同时,保持甚至提升操作性能,是一个亟待解决的问题。
核心思路:本文的核心思路是利用柔性表面层将离散的执行器连接起来,形成一个连续可控的操作表面。这种设计允许执行器之间存在较大的间距,从而降低了执行器密度。柔性层能够传递执行器的运动和力,使得即使执行器间距较大,也能实现对物体的精确操作。
技术框架:该系统由模块化的3自由度机器人瓦片组成,这些瓦片通过柔性表面层互连。整体架构包含以下几个关键部分:1) 执行器瓦片:提供运动和力;2) 柔性表面层:连接执行器,传递运动和力;3) 控制系统:协调各个执行器的运动,实现对物体的操作。操作流程包括:1) 感知物体的位置和姿态;2) 规划执行器的运动轨迹;3) 控制执行器运动,实现对物体的操作。
关键创新:该方法最重要的技术创新点在于引入了柔性表面层,将离散的执行器连接成一个连续的操作表面。与传统的密集执行器阵列相比,该方法显著降低了执行器密度,同时保持了操作能力。此外,该方法还提出了一种新的操作策略,能够将物体平移到N X N阵列中的任意位置。
关键设计:柔性层的材料选择至关重要,需要在刚度和柔性之间取得平衡,保证能够有效地传递执行器的运动和力,同时又具有足够的柔性,以适应不同形状和大小的物体。具体的参数设置(如柔性层的厚度、材料的弹性模量等)需要根据实际应用进行优化。控制算法需要考虑执行器之间的耦合效应,以实现精确的物体操作。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法能够成功操作各种形状和大小的物体。通过一个最小的2x2原型,验证了该方法的可行性。虽然论文中没有给出具体的性能数据,但实验结果表明,该方法在降低执行器密度的同时,保持了良好的操作性能。未来的研究可以进一步量化该方法的性能,并与其他方法进行比较。
🎯 应用场景
该研究成果可应用于自动化装配、物流分拣、医疗康复等领域。例如,在自动化装配中,该系统可以用于精确地抓取和放置各种形状和大小的零件。在物流分拣中,该系统可以用于快速地分拣不同类型的包裹。在医疗康复中,该系统可以用于辅助患者进行精细动作训练。未来,该技术有望进一步发展,实现更复杂、更灵活的操作任务。
📄 摘要(原文)
Distributed Manipulator Systems, composed of arrays of robotic actuators necessitate dense actuator arrays to effectively manipulate small objects. This paper presents a system composed of modular 3-DoF robotic tiles interconnected by a compliant surface layer, forming a continuous, controllable manipulation surface. The compliant layer permits increased actuator spacing without compromising object manipulation capabilities, significantly reducing actuator density while maintaining robust control, even for smaller objects. We characterize the coupled workspace of the array and develop a manipulation strategy capable of translating objects to arbitrary positions within an N X N array. The approach is validated experimentally using a minimal 2 X 2 prototype, demonstrating the successful manipulation of objects with varied shapes and sizes.