Design and Control of Modular Magnetic Millirobots for Multimodal Locomotion and Shape Reconfiguration
作者: Erik Garcia Oyono, Jialin Lin, Dandan Zhang
分类: cs.RO, eess.SY
发布日期: 2026-02-22
备注: Accepted by 2026 ICRA
💡 一句话要点
设计模块化磁性微型机器人,实现多模态运动和形状重构
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 模块化机器人 磁性微机器人 多模态运动 形状重构 闭环控制 生物医学应用 A*路径规划
📋 核心要点
- 现有模块化磁性平台依赖工作空间碰撞进行重构,采用笨重的三维电磁系统,缺乏鲁棒的单模块控制,限制了其在生物医学环境中的应用。
- 该论文提出一种模块化磁性微型机器人平台,通过设计具有特定功能的模块,并结合可编程磁场控制,实现多模态运动和形状重构。
- 实验结果表明,该系统能够实现闭环导航、自组装、多模态转换和拆卸等功能,验证了其在受限环境中执行任务的潜力。
📝 摘要(中文)
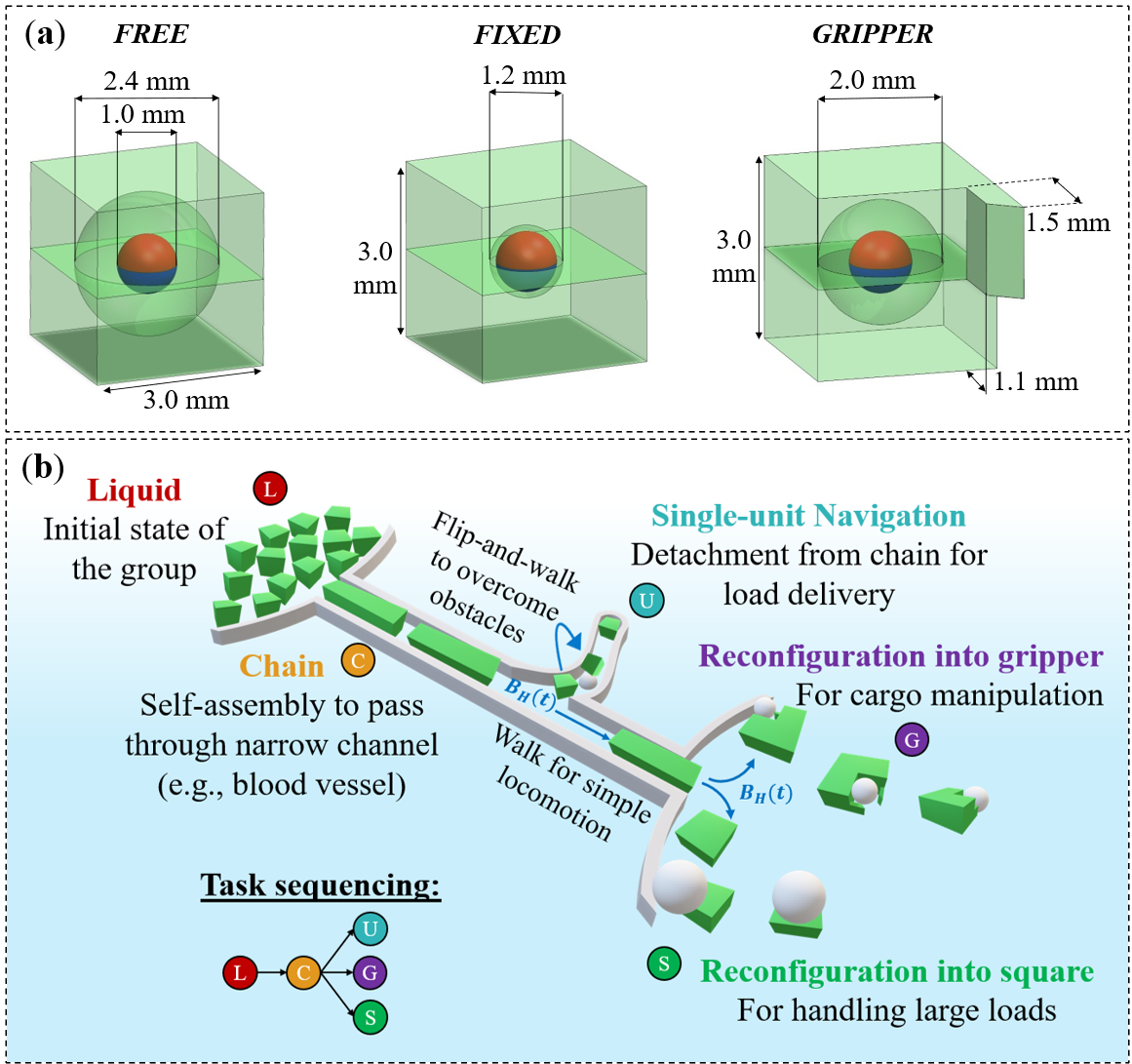
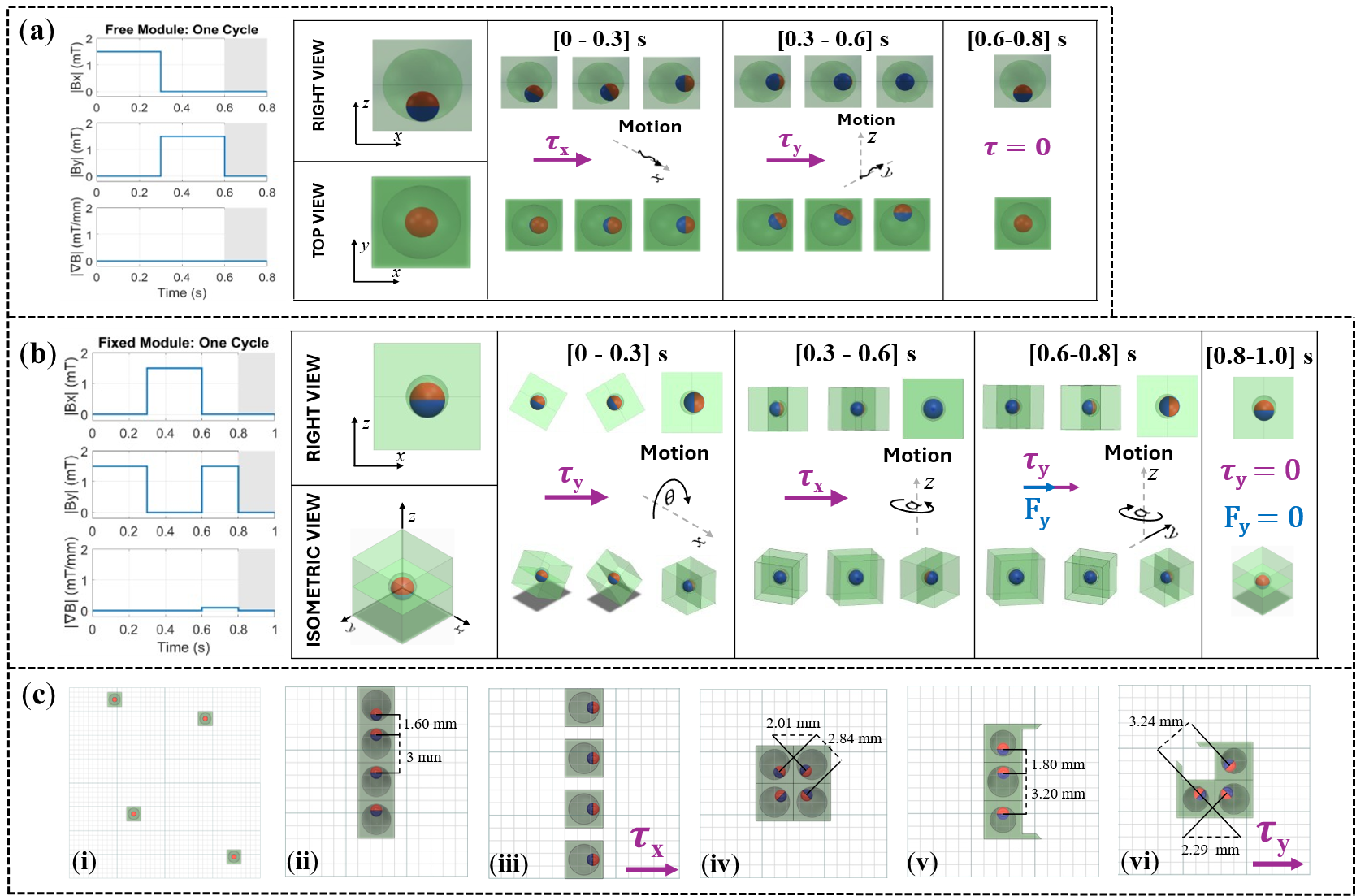
本文提出了一种模块化磁性微型机器人平台,该平台由三个立方体模块组成,每个模块都嵌入了永磁体,并设计用于不同的功能角色:支持自组装和重构的自由模块、实现翻转和行走运动的固定模块以及用于货物操作的夹持器模块。通过可编程的时变二维均匀和梯度磁场输入的组合来驱动运动和重构。实验证明了使用实时视觉反馈和A*路径规划的闭环导航,建立了强大的单模块控制能力。除了运动之外,该系统还实现了低场强下的自组装、多模态转换和拆卸。链到夹持器的转换在90%的试验中成功,而链到正方形的转换不太一致,突出了模块几何形状在重构可靠性中的作用。这些结果建立了一个通用的模块化机器人平台,能够实现多模态行为和鲁棒控制,为在受限环境中实现可扩展和自适应的任务执行提供了一条有希望的途径。
🔬 方法详解
问题定义:现有模块化机器人,尤其是在微型尺度下,存在依赖碰撞进行重构、电磁系统体积大、单模块控制不鲁棒等问题。这些问题限制了其在生物医学等受限环境中的应用,例如在人体内进行药物递送或微创手术。
核心思路:该论文的核心思路是通过设计具有特定功能的模块(自由模块、固定模块、夹持器模块),并结合可编程的二维磁场控制,实现模块间的自组装、运动和重构。这种模块化设计和精确控制能够克服现有方法的局限性,提高机器人在复杂环境中的适应性和任务执行能力。
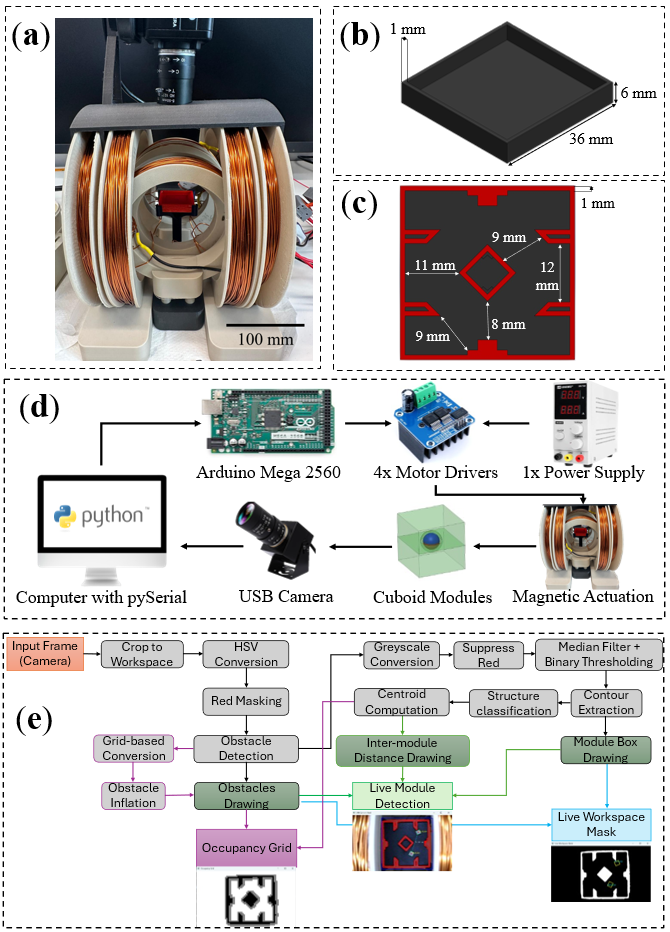
技术框架:该系统的整体架构包括三个关键部分:模块化机器人本体、磁场控制系统和视觉反馈系统。模块化机器人由三个立方体模块组成,每个模块嵌入永磁体。磁场控制系统产生可编程的时变二维均匀和梯度磁场,用于驱动模块的运动和重构。视觉反馈系统提供实时图像,用于闭环控制和路径规划。整个流程包括:目标任务定义、路径规划、磁场控制、视觉反馈和模块运动。
关键创新:该论文最重要的技术创新点在于模块化设计和二维磁场控制的结合。通过设计具有不同功能的模块,可以实现多模态运动和形状重构。二维磁场控制简化了控制系统,降低了成本,并提高了控制精度。此外,该论文还实现了基于视觉反馈的闭环导航,提高了机器人的鲁棒性。
关键设计:模块的几何形状(立方体)和磁铁的极性分布是关键设计参数。立方体形状便于模块间的连接和分离。磁铁的极性分布决定了模块间的吸引和排斥力,从而影响自组装和重构的成功率。此外,A*路径规划算法和PID控制器用于实现闭环导航。链到夹持器的转换成功率达到90%,表明模块几何形状对重构可靠性有重要影响。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该系统能够实现低场强下的自组装、多模态转换和拆卸。链到夹持器的转换成功率达到90%,验证了模块化设计的有效性。此外,通过闭环导航,机器人能够准确地到达目标位置,证明了控制系统的鲁棒性。这些结果表明,该平台具有在受限环境中执行复杂任务的潜力。
🎯 应用场景
该研究成果在生物医学领域具有广阔的应用前景,例如在人体内进行靶向药物递送、微创手术、细胞操作等。此外,该技术还可以应用于微型装配、环境监测等领域。未来,可以通过进一步优化模块设计和控制算法,提高机器人的性能和可靠性,使其能够适应更复杂的环境和任务。
📄 摘要(原文)
Modular small-scale robots offer the potential for on-demand assembly and disassembly, enabling task-specific adaptation in dynamic and constrained environments. However, existing modular magnetic platforms often depend on workspace collisions for reconfiguration, employ bulky three-dimensional electromagnetic systems, and lack robust single-module control, which limits their applicability in biomedical settings. In this work, we present a modular magnetic millirobotic platform comprising three cube-shaped modules with embedded permanent magnets, each designed for a distinct functional role: a free module that supports self-assembly and reconfiguration, a fixed module that enables flip-and-walk locomotion, and a gripper module for cargo manipulation. Locomotion and reconfiguration are actuated by programmable combinations of time-varying two-dimensional uniform and gradient magnetic field inputs. Experiments demonstrate closed-loop navigation using real-time vision feedback and A* path planning, establishing robust single-module control capabilities. Beyond locomotion, the system achieves self-assembly, multimodal transformations, and disassembly at low field strengths. Chain-to-gripper transformations succeeded in 90% of trials, while chain-to-square transformations were less consistent, underscoring the role of module geometry in reconfiguration reliability. These results establish a versatile modular robotic platform capable of multimodal behavior and robust control, suggesting a promising pathway toward scalable and adaptive task execution in confined environments.