Temporal-Logic-Aware Frontier-Based Exploration
作者: Azizollah Taheri, Derya Aksaray
分类: cs.RO
发布日期: 2026-02-21
备注: 8 pages, 7 figures
💡 一句话要点
提出时序逻辑感知的基于前沿探索算法,解决未知环境下自主机器人的运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 时序逻辑 运动规划 自主机器人 前沿探索 未知环境
📋 核心要点
- 现有方法在未知环境中难以保证机器人满足复杂的时序逻辑任务,尤其是在任务执行过程中存在不可逆操作时。
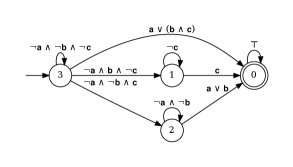
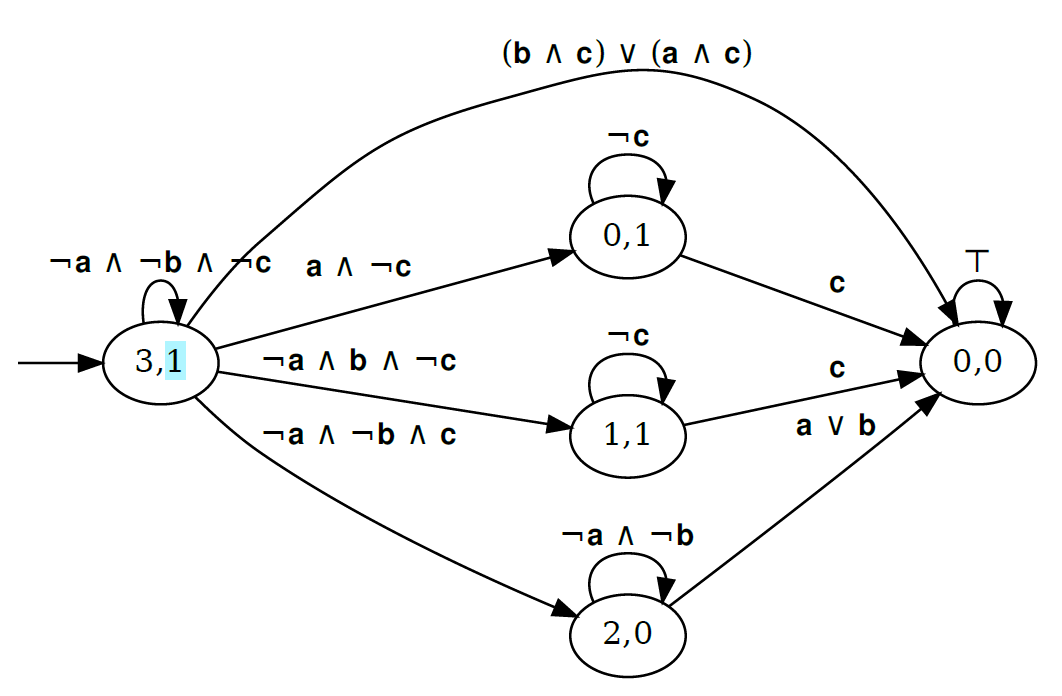
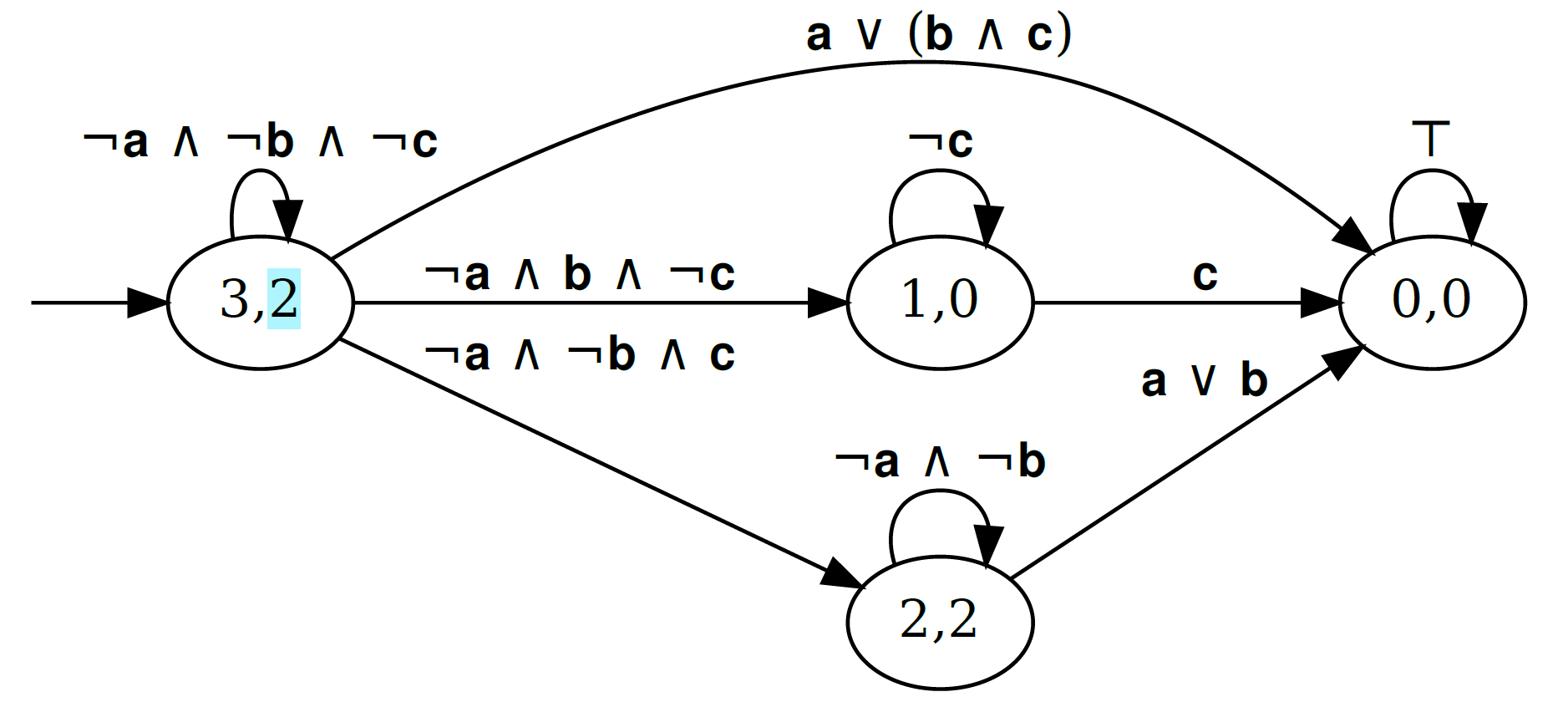
- 论文提出一种基于“提交状态”的自动机,用于捕捉不可逆操作带来的任务进度,并指导机器人探索。
- 通过仿真实验验证了所提算法的有效性,表明该方法能够在未知环境中引导机器人完成时序逻辑任务。
📝 摘要(中文)
本文研究了在未知环境中自主机器人满足时序逻辑运动规划的问题。目标是使机器人在事先不知道期望标签确切位置的情况下,满足句法上co-safe的线性时序逻辑(scLTL)规范。我们引入了一种新型的自动机状态,称为提交状态。这些状态捕获了由于不可逆转的行为而产生的中间任务进度。换句话说,在采取导致提交状态的行动之后,某些未来的满足路径变得不可行。通过利用提交状态,我们提出了一种可靠且完备的基于前沿探索的算法,该算法策略性地引导机器人朝着任务取得进展,同时保留满足任务的所有可能方式。通过仿真验证了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决未知环境下,自主机器人如何满足给定的时序逻辑(特别是scLTL)运动规划问题。现有方法在处理具有不可逆操作的任务时,难以保证任务的完成,因为这些操作会限制未来的可行路径。传统的探索算法可能无法有效地引导机器人探索那些仍然能够满足任务的区域。
核心思路:论文的核心思路是引入“提交状态”的概念,用于表示执行某些动作后,任务已经取得了一定的进展,但同时也可能导致某些未来的满足路径变得不可行。通过显式地建模这些提交状态,算法可以更好地权衡探索的收益和风险,从而更有效地引导机器人探索。
技术框架:该方法基于前沿探索框架,并对其进行了扩展,以适应时序逻辑约束。整体流程如下:1. 构建带有提交状态的自动机,用于表示时序逻辑规范。2. 机器人根据当前状态和环境信息,选择下一个要探索的前沿。3. 执行探索动作,并更新环境地图和自动机状态。4. 重复步骤2和3,直到满足时序逻辑规范或确定无法满足。
关键创新:该论文的关键创新在于引入了“提交状态”的概念,并将其集成到前沿探索算法中。与传统的基于前沿探索的算法相比,该方法能够更好地处理具有不可逆操作的时序逻辑任务。通过显式地建模提交状态,算法可以更准确地评估探索的收益和风险,从而更有效地引导机器人探索。
关键设计:论文中关键的设计包括:1. 如何将时序逻辑规范转换为带有提交状态的自动机。2. 如何根据当前状态和环境信息,选择下一个要探索的前沿。这可能涉及到设计一个合适的奖励函数,用于权衡探索的收益(例如,发现新的区域)和风险(例如,进入一个无法满足任务的区域)。3. 如何在执行探索动作后,更新自动机状态。这需要考虑执行动作的后果,以及如何将这些后果反映到自动机状态的转移上。
🖼️ 关键图片
📊 实验亮点
论文通过仿真实验验证了所提算法的有效性。实验结果表明,与传统的基于前沿探索的算法相比,该方法能够在未知环境中更有效地引导机器人完成时序逻辑任务。具体的性能数据(例如,任务完成时间、探索区域大小等)未知,但论文强调了该方法在处理具有不可逆操作的任务时的优势。
🎯 应用场景
该研究成果可应用于各种需要在未知环境中执行复杂任务的自主机器人系统,例如:搜索救援、环境监测、工业巡检等。通过结合时序逻辑规范和前沿探索算法,可以使机器人在未知环境中更加智能和可靠地完成任务,提高工作效率和安全性。未来的研究可以进一步探索如何将该方法应用于更复杂的时序逻辑规范和更大规模的环境。
📄 摘要(原文)
This paper addresses the problem of temporal logic motion planning for an autonomous robot operating in an unknown environment. The objective is to enable the robot to satisfy a syntactically co-safe Linear Temporal Logic (scLTL) specification when the exact locations of the desired labels are not known a priori. We introduce a new type of automaton state, referred to as commit states. These states capture intermediate task progress resulting from actions whose consequences are irreversible. In other words, certain future paths to satisfaction become not feasible after taking those actions that lead to the commit states. By leveraging commit states, we propose a sound and complete frontier-based exploration algorithm that strategically guides the robot to make progress toward the task while preserving all possible ways of satisfying it. The efficacy of the proposed method is validated through simulations.