Equivalence and Divergence of Bayesian Log-Odds and Dempster's Combination Rule for 2D Occupancy Grids
作者: Tatiana Berlenko, Kirill Krinkin
分类: cs.RO
发布日期: 2026-02-21
备注: 29 pages, 6 figures, 6 tables. Includes complete proofs, ablation studies, and supplementary statistical analysis
💡 一句话要点
提出基于pignistic变换的比较方法,评估贝叶斯Log-Odds与Dempster组合规则在栅格地图构建中的优劣。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 栅格地图构建 贝叶斯融合 Dempster组合规则 pignistic变换 概率融合 机器人导航 环境感知
📋 核心要点
- 栅格地图构建中,贝叶斯方法和Dempster组合规则是两种常用的融合方法,但缺乏公平的比较框架。
- 论文提出基于pignistic变换的匹配方法,通过匹配观测概率,隔离融合规则与传感器参数的影响,实现公平比较。
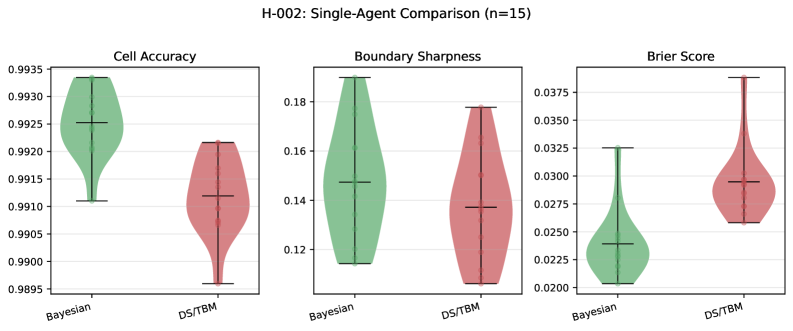
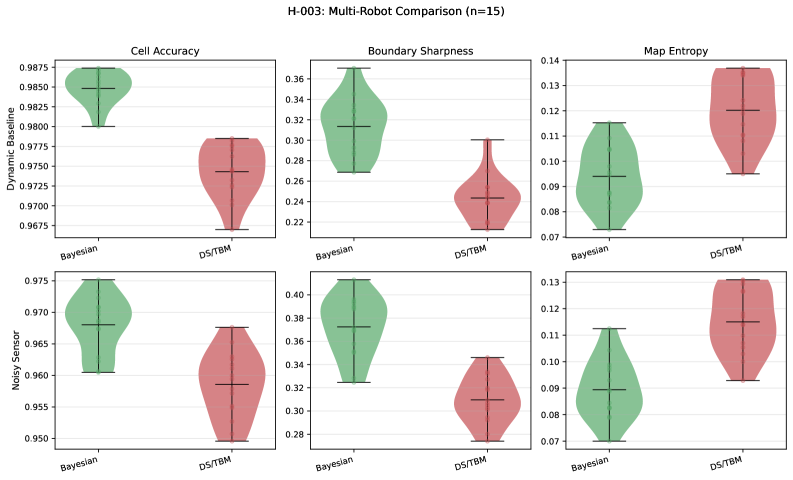
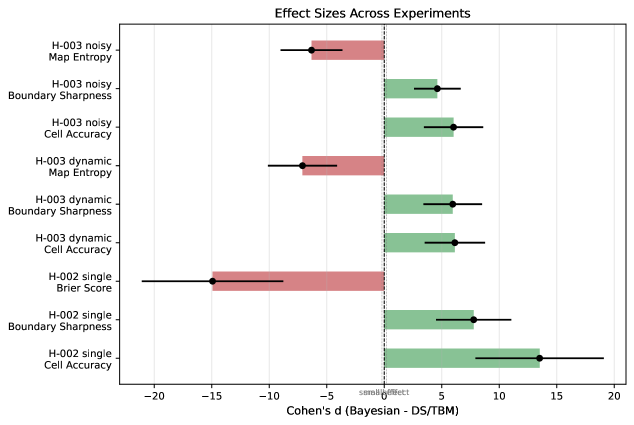
- 实验表明,在BetP匹配下,贝叶斯融合优于Dempster规则;在归一化合理性匹配下,结果相反,强调了匹配标准的重要性。
📝 摘要(中文)
本文提出了一种基于pignistic变换的方法,用于公平比较贝叶斯log-odds和Dempster组合规则在栅格地图构建中的性能。该方法通过匹配每次观测的决策概率,将融合规则与传感器参数化隔离开来。在仿真和真实激光雷达数据集上,通过BetP匹配,贝叶斯融合始终表现更优(15/15方向一致性,p = 3.1e-5),且绝对差异较小(0.001-0.022)。使用归一化合理性匹配时,结果反转,证实了结果依赖于匹配标准。该方法可复用于未来任何贝叶斯/信念函数比较。
🔬 方法详解
问题定义:论文旨在解决二维栅格地图构建中,如何公平比较贝叶斯log-odds和Dempster组合规则这两种概率融合方法的问题。现有方法通常直接比较两种方法的结果,但由于传感器参数化和先验信息设置的差异,导致比较结果可能不公平,难以确定哪种融合规则本身更优。
核心思路:论文的核心思路是通过pignistic变换,将两种融合规则的输出转换为可比较的概率形式,并基于不同的匹配准则(如BetP匹配和归一化合理性匹配)来评估它们的性能。通过匹配每次观测的决策概率,从而将融合规则与传感器参数化隔离开来,从而实现更公平的比较。
技术框架:该方法主要包含以下几个步骤:1) 使用贝叶斯log-odds或Dempster组合规则进行栅格地图构建;2) 对两种融合规则的输出进行pignistic变换,将其转换为概率形式;3) 基于不同的匹配准则(如BetP匹配和归一化合理性匹配),比较两种方法的性能;4) 在仿真和真实数据集上进行实验验证,并进行下游路径规划任务的评估。
关键创新:论文最重要的技术创新点在于提出了基于pignistic变换的匹配方法,用于公平比较不同的概率融合规则。与现有方法相比,该方法能够有效地隔离融合规则与传感器参数的影响,从而更准确地评估融合规则本身的性能。此外,论文还探讨了不同匹配准则对比较结果的影响,强调了匹配准则选择的重要性。
关键设计:论文的关键设计包括:1) 使用pignistic变换将Dempster-Shafer理论的信念函数转换为概率分布;2) 采用BetP匹配和归一化合理性匹配作为不同的匹配准则,用于比较两种融合规则的性能;3) 在仿真和真实激光雷达数据集上进行实验验证,并使用方向一致性作为评估指标;4) 将栅格地图应用于下游路径规划任务,进一步评估地图质量。
🖼️ 关键图片
📊 实验亮点
实验结果表明,在BetP匹配下,贝叶斯融合在方向一致性方面始终优于Dempster组合规则(15/15方向一致性,p = 3.1e-5),且绝对差异较小(0.001-0.022)。然而,在归一化合理性匹配下,结果反转,表明匹配准则的选择对比较结果有显著影响。这些结果强调了在比较不同融合规则时,选择合适的匹配准则的重要性。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、环境感知等领域。通过选择合适的概率融合规则,可以提高栅格地图构建的准确性和可靠性,从而提升机器人的自主导航能力和环境适应性。该方法也为未来比较和选择不同的概率融合算法提供了一个通用的框架。
📄 摘要(原文)
We introduce a pignistic-transform-based methodology for fair comparison of Bayesian log-odds and Dempster's combination rule in occupancy grid mapping, matching per-observation decision probabilities to isolate the fusion rule from sensor parameterization. Under BetP matching across simulation, two real lidar datasets, and downstream path planning, Bayesian fusion is consistently favored (15/15 directional consistency, p = 3.1e-5) with small absolute differences (0.001-0.022). Under normalized plausibility matching, the direction reverses, confirming the result is matching-criterion-specific. The methodology is reusable for any future Bayesian/belief function comparison.