Gait Asymmetry from Unilateral Weakness and Improvement With Ankle Assistance: a Reinforcement Learning based Simulation Study
作者: Yifei Yuan, Ghaith Androwis, Xianlian Zhou
分类: cs.RO
发布日期: 2026-02-21
💡 一句话要点
基于强化学习的肌肉骨骼模拟,研究单侧肌无力步态不对称及踝关节外骨骼辅助改善
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 强化学习 肌肉骨骼模拟 步态不对称 外骨骼辅助 单侧肌无力
📋 核心要点
- 单侧肌肉无力导致步态不对称,影响肢体协调和站立时机,现有方法缺乏有效量化和改善手段。
- 利用强化学习构建肌肉骨骼模拟框架,通过逐步降低单侧肌肉力量模拟不对称步态,并评估踝关节外骨骼的辅助效果。
- 实验结果表明,肌肉无力程度与步态不对称性呈正相关,踝关节外骨骼在一定程度上改善了运动学对称性。
📝 摘要(中文)
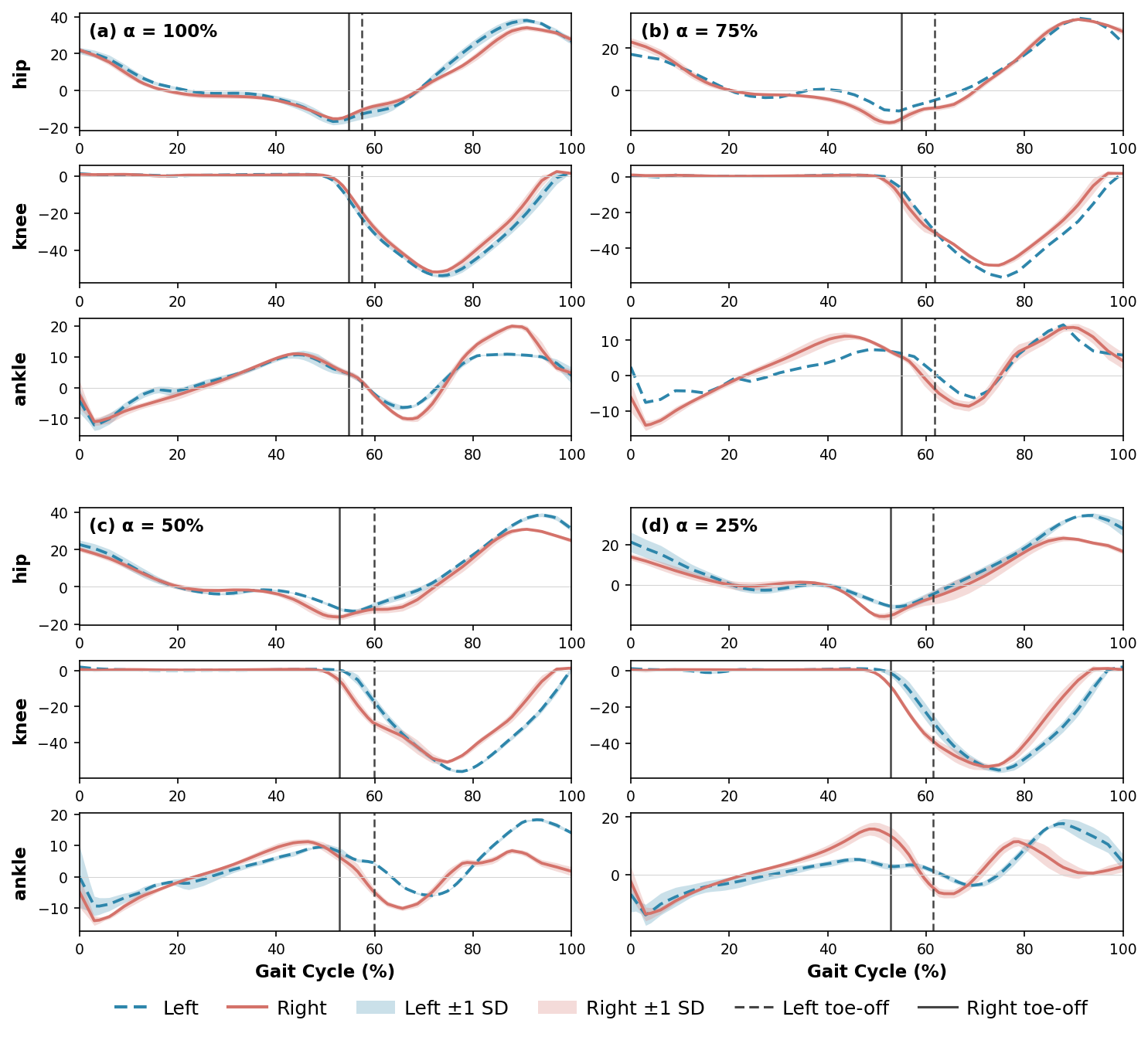
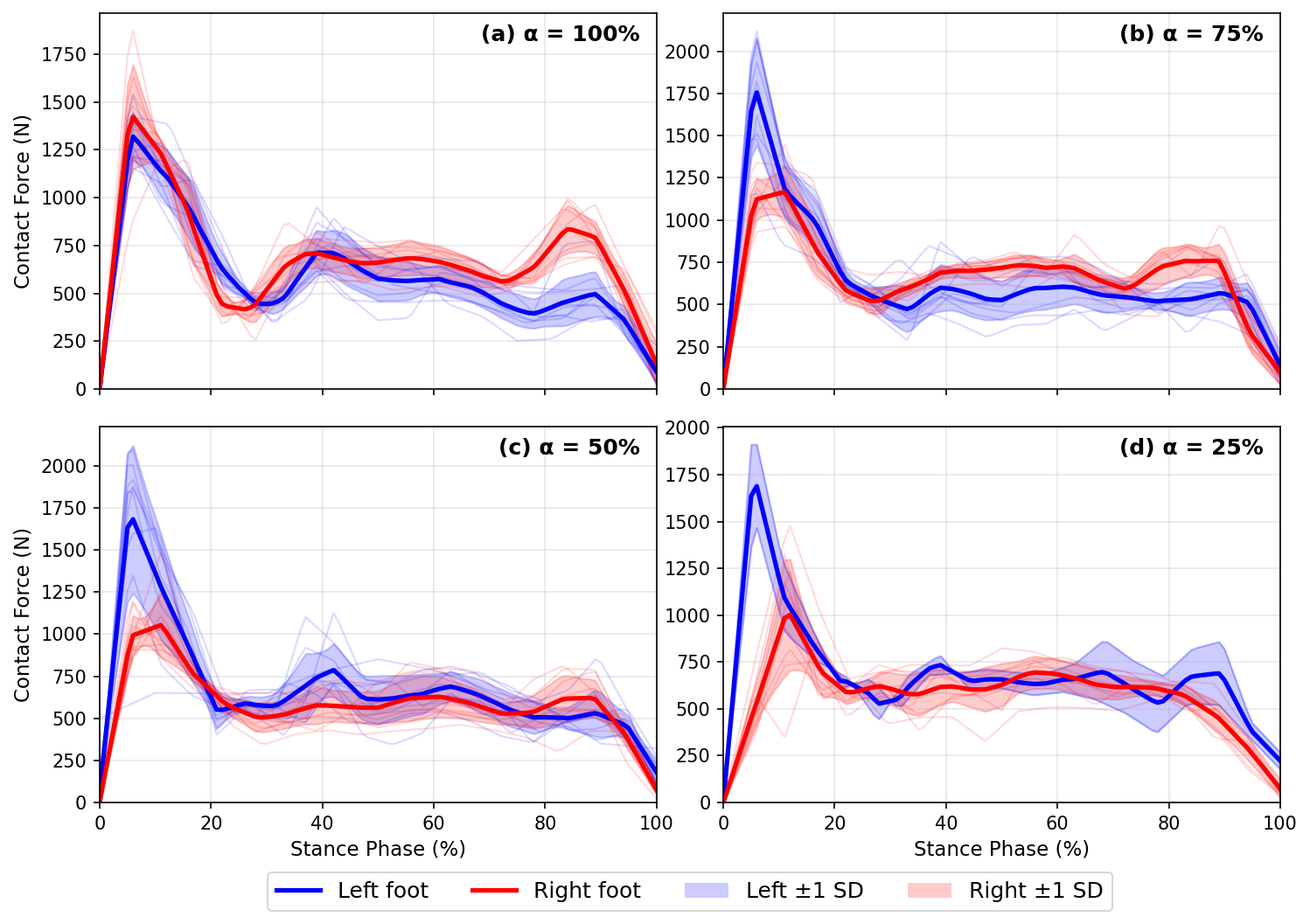
本研究提出了一种基于强化学习(RL)的肌肉骨骼模拟框架,旨在(1)量化渐进性单侧肌肉无力如何影响步态对称性,以及(2)评估踝关节外骨骼辅助是否能改善受损条件下的步态对称性。总体目标是建立一个基于模拟和学习的工作流程,在患者实验之前支持早期控制器开发。通过将右腿肌肉力量降低至基线的75%、50%和25%来诱导不对称步态。使用脚趾离地时间、峰值接触力和关节水平对称性指标来量化步态不对称性。肌肉无力程度的增加导致了越来越大的时间和运动学不对称性,在踝关节处最为明显。在50%的肌肉力量下,踝关节外骨骼辅助改善了相对于未辅助受损情况的运动学对称性,降低了踝关节对称性指数的幅度,并增加了踝关节相关性,但峰值负荷仍然偏向于未受损侧。总而言之,该框架支持对损伤严重程度和辅助策略的受控评估,并为未来在人体实验中进行验证奠定了基础。
🔬 方法详解
问题定义:论文旨在解决单侧肌肉无力引起的步态不对称问题。现有方法难以在患者实验前进行充分的控制器开发和辅助策略评估,缺乏对损伤严重程度和辅助效果的受控评估手段。
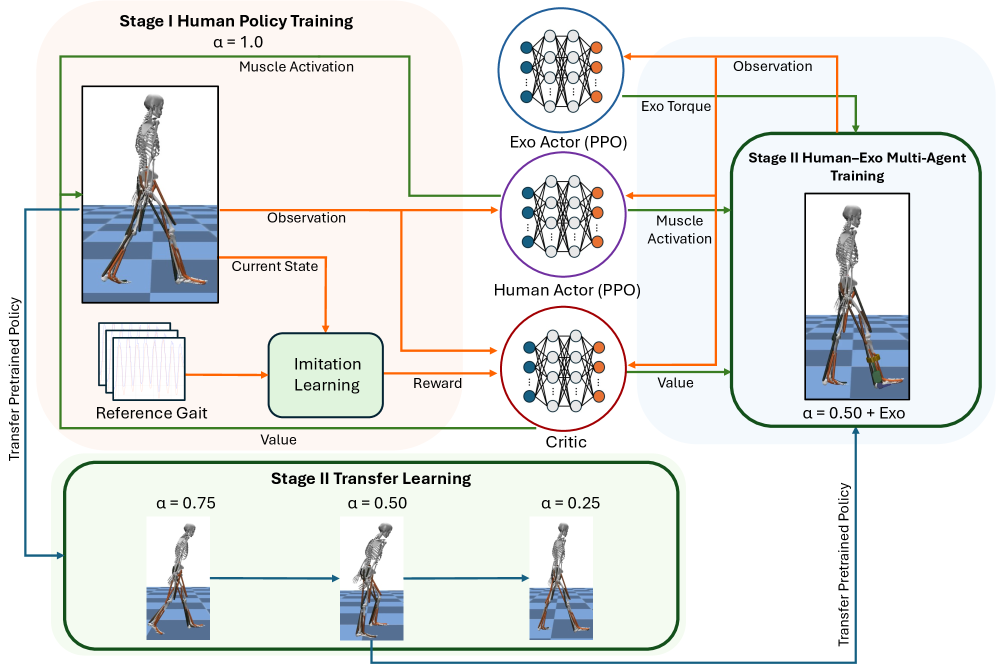
核心思路:论文的核心思路是利用强化学习构建一个肌肉骨骼模拟环境,通过控制肌肉力量来模拟不同程度的单侧肌肉无力,并使用强化学习算法训练踝关节外骨骼的控制器,从而评估外骨骼对改善步态对称性的效果。这种方法可以在虚拟环境中进行大量的实验,降低了患者实验的风险和成本。
技术框架:该研究的技术框架主要包括以下几个模块:1)肌肉骨骼模型:使用OpenSim等工具构建人体下肢的肌肉骨骼模型。2)强化学习环境:将肌肉骨骼模型集成到强化学习环境中,定义状态空间、动作空间和奖励函数。状态空间包括关节角度、角速度等信息,动作空间包括外骨骼的辅助力矩,奖励函数旨在鼓励对称的步态。3)强化学习算法:使用如PPO等强化学习算法训练外骨骼控制器。4)步态分析:使用对称性指标(如对称性指数SI和相关系数r)量化步态对称性。
关键创新:该研究的关键创新在于将强化学习与肌肉骨骼模拟相结合,构建了一个可用于评估步态不对称和外骨骼辅助效果的虚拟平台。与传统方法相比,该方法能够更灵活地控制实验条件,并进行大量的模拟实验,从而加速外骨骼控制器的开发过程。
关键设计:在实验设计方面,论文逐步降低右腿肌肉力量(75%、50%、25%),模拟不同程度的单侧肌肉无力。奖励函数的设计旨在鼓励对称的步态,例如,可以包含左右腿关节角度差异的惩罚项。强化学习算法采用PPO,并对超参数进行了调整,以获得最佳的训练效果。
🖼️ 关键图片
📊 实验亮点
实验结果表明,随着肌肉无力程度的增加,步态不对称性也随之增加,尤其是在踝关节处。在50%肌肉力量下,踝关节外骨骼辅助将踝关节对称性指数从25.8%降低到18.5%,相关系数从0.948提高到0.966。虽然峰值负荷仍然偏向于未受损侧,但整体运动学对称性得到了改善。
🎯 应用场景
该研究成果可应用于康复机器人、外骨骼设计和步态分析等领域。通过模拟不同程度的肌肉无力,可以帮助康复医生制定个性化的康复计划。此外,该框架还可以用于评估不同外骨骼设计的辅助效果,从而指导外骨骼的优化设计。该研究为未来开发更有效的步态辅助设备提供了理论基础和技术支持。
📄 摘要(原文)
Unilateral muscle weakness often leads to asymmetric gait, disrupting interlimb coordination and stance timing. This study presents a reinforcement learning (RL) based musculoskeletal simulation framework to (1) quantify how progressive unilateral muscle weakness affects gait symmetry and (2) evaluate whether ankle exoskeleton assistance can improve gait symmetry under impaired conditions. The overarching goal is to establish a simulation- and learning-based workflow that supports early controller development prior to patient experiments. Asymmetric gait was induced by reducing right-leg muscle strength to 75%, 50%, and 25% of baseline. Gait asymmetry was quantified using toe-off timing, peak contact forces, and joint-level symmetry metrics. Increasing weakness produced progressively larger temporal and kinematic asymmetry, most pronounced at the ankle. Ankle range of motion symmetry degraded from near-symmetric behavior at 100% strength (symmetry index, SI = +6.4%; correlation r=0.974) to severe asymmetry at 25% strength (SI = -47.1%, r=0.889), accompanied by a load shift toward the unimpaired limb. At 50% strength, ankle exoskeleton assistance improved kinematic symmetry relative to the unassisted impaired condition, reducing the magnitude of ankle SI from 25.8% to 18.5% and increasing ankle correlation from r=0.948 to 0.966, although peak loading remained biased toward the unimpaired side. Overall, this framework supports controlled evaluation of impairment severity and assistive strategies, and provides a basis for future validation in human experiments.