CLASH: Collision Learning via Augmented Sim-to-real Hybridization to Bridge the Reality Gap
作者: Haotian He, Ning Guo, Siqi Shi, Qipeng Liu, Wenzhao Lian
分类: cs.RO
发布日期: 2026-02-21
💡 一句话要点
CLASH:通过增强的Sim-to-real混合学习弥合碰撞现实差距
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Sim-to-real 碰撞学习 混合模拟器 强化学习 机器人操作
📋 核心要点
- 现有物理引擎在模拟碰撞等复杂动力学时,精度不足,导致Sim-to-real迁移困难。
- CLASH通过少量真实数据学习代理碰撞模型,构建高保真混合模拟器,提升模拟精度。
- 实验表明,CLASH能显著提升策略在真实世界的迁移性能,例如连续推物任务成功率翻倍。
📝 摘要(中文)
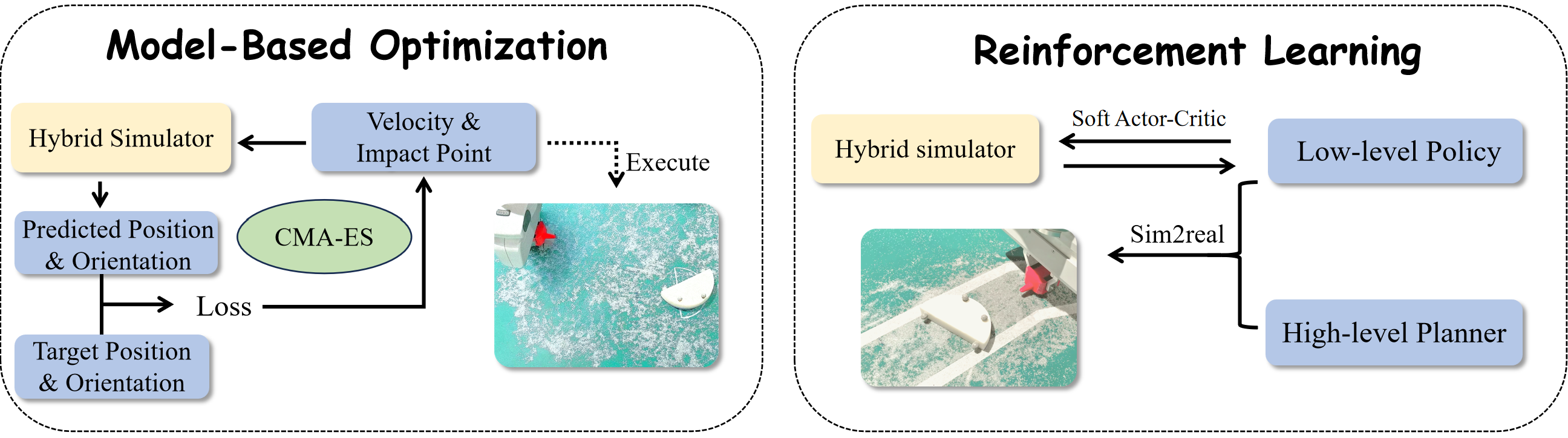
Sim-to-real的差距,尤其是在碰撞等接触密集型动力学的不精确建模方面,仍然是将模拟中训练的机器人策略部署到现实世界的主要障碍。传统的物理引擎通常以牺牲精度来换取计算速度,导致差异阻碍了策略的直接迁移。为了解决这个问题,我们引入了碰撞学习通过增强的Sim-to-real混合(CLASH),这是一个数据高效的框架,通过从最少的真实世界数据中学习代理碰撞模型来创建高保真混合模拟器。在CLASH中,首先从不完善的模拟器(MuJoCo)中提炼出一个基础模型,以捕获一般的物理先验;然后使用极少量的真实世界交互(少至10个样本)对该模型进行微调,以纠正模拟器的固有不准确性。由此产生的混合模拟器不仅实现了更高的预测精度,而且将碰撞计算时间减少了近50%。我们证明,使用我们的混合模拟器获得的策略可以更稳健地迁移到现实世界,通过强化学习使连续推物任务的成功率提高了一倍,并通过基于模型的控制显著提高了任务性能。
🔬 方法详解
问题定义:论文旨在解决机器人领域中,由于模拟器在碰撞动力学建模上的不准确性,导致在模拟环境中训练的策略难以直接迁移到真实世界的问题。现有方法通常依赖于高精度的物理引擎,但计算成本高昂,或者使用领域自适应等技术,但需要大量的真实世界数据。
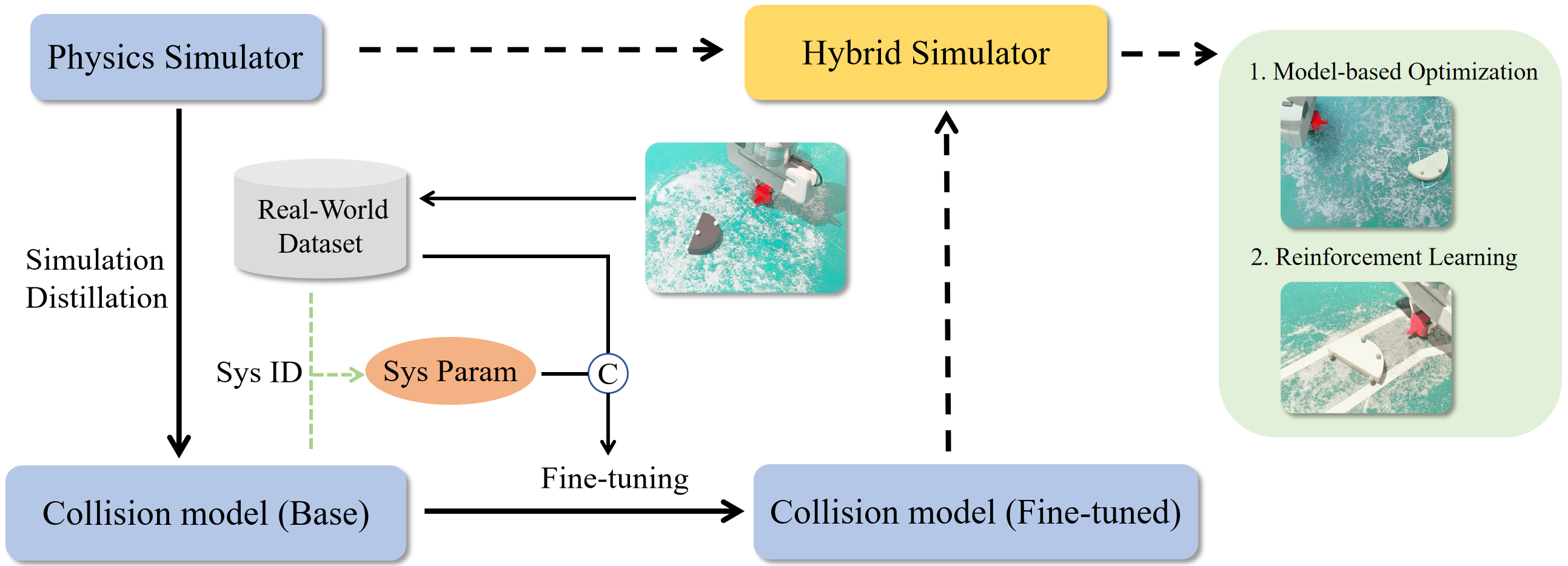
核心思路:论文的核心思路是利用一个数据高效的混合模拟器,该模拟器结合了不完美的模拟器(如MuJoCo)的物理先验知识和少量真实世界数据学习到的碰撞模型。通过这种方式,可以在保证计算效率的同时,提高模拟器的精度,从而实现更好的Sim-to-real迁移。
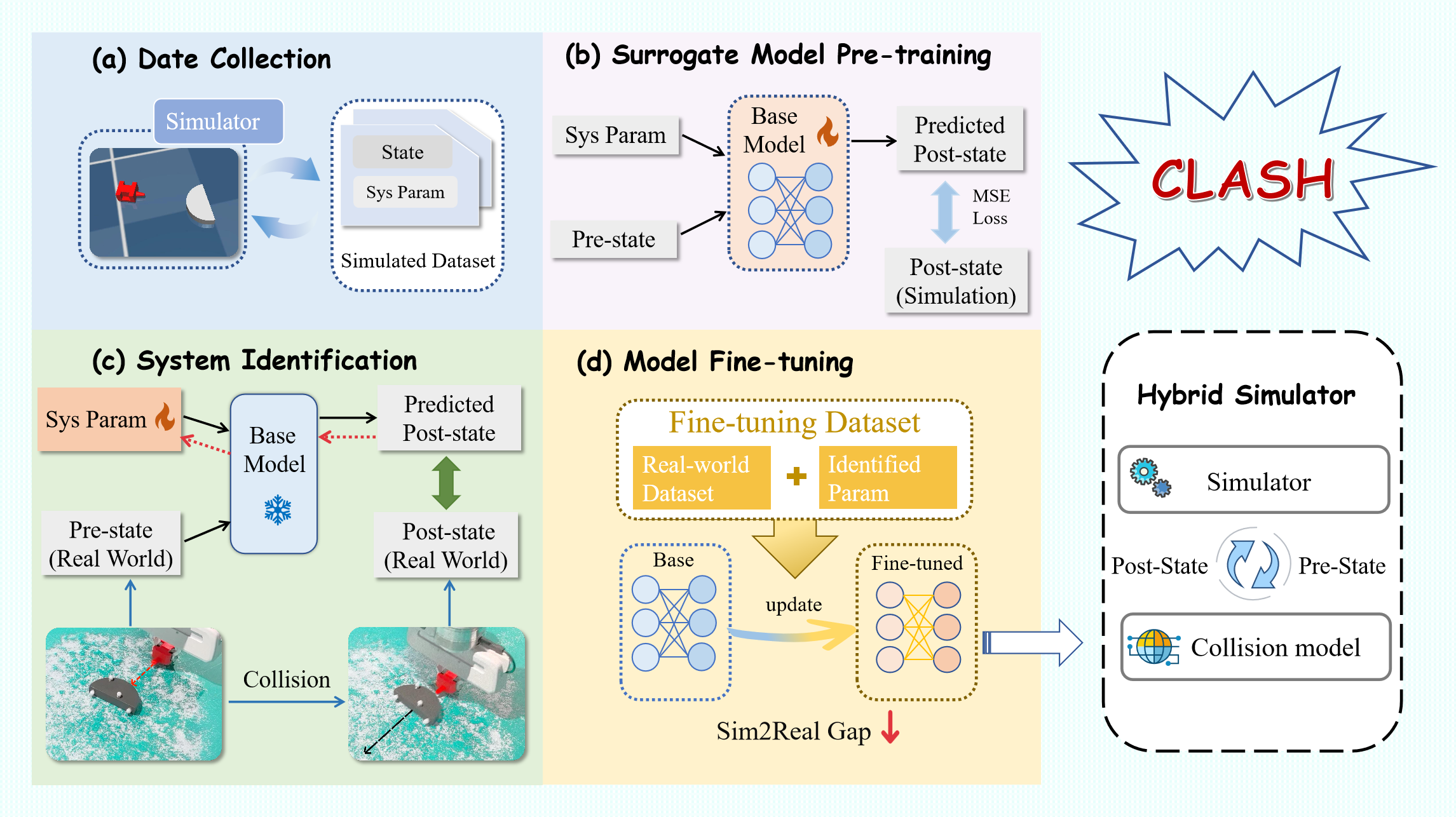
技术框架:CLASH框架主要包含两个阶段:1) 基础模型蒸馏:从一个不完美的模拟器(MuJoCo)中训练一个基础模型,用于捕获一般的物理先验知识。2) 真实数据微调:使用少量真实世界交互数据(例如,通过碰撞实验收集的数据)对基础模型进行微调,以纠正模拟器的固有不准确性。最终得到的混合模拟器可以更准确地预测碰撞结果。
关键创新:CLASH的关键创新在于其数据效率。它只需要极少量的真实世界数据(例如,10个样本)就可以显著提高模拟器的精度,并实现更好的Sim-to-real迁移。这与需要大量真实世界数据的传统方法形成了鲜明对比。此外,该方法还通过学习代理碰撞模型,降低了碰撞计算的时间成本。
关键设计:论文中,代理碰撞模型可能采用神经网络结构,例如多层感知机(MLP)或图神经网络(GNN),用于预测碰撞后的状态。损失函数的设计可能包括预测状态与真实状态之间的均方误差(MSE)等。在微调阶段,可以使用Adam等优化器来更新模型参数。具体的网络结构和参数设置可能需要根据具体的任务和数据集进行调整。
🖼️ 关键图片
📊 实验亮点
实验结果表明,CLASH框架能够显著提高Sim-to-real迁移的性能。在连续推物任务中,使用CLASH训练的策略在真实世界中的成功率提高了一倍。此外,CLASH还能够将碰撞计算时间减少近50%,从而提高模拟效率。这些结果表明,CLASH是一种有效且高效的Sim-to-real迁移方法。
🎯 应用场景
CLASH框架具有广泛的应用前景,可用于机器人操作、自动驾驶、游戏AI等领域。通过提高模拟器的精度和效率,可以加速机器人策略的开发和部署,降低开发成本。例如,可以用于训练机器人在复杂环境中的抓取、装配等任务,或者用于自动驾驶车辆的碰撞避免和路径规划。
📄 摘要(原文)
The sim-to-real gap, particularly in the inaccurate modeling of contact-rich dynamics like collisions, remains a primary obstacle to deploying robot policies trained in simulation. Conventional physics engines often trade accuracy for computational speed, leading to discrepancies that prevent direct policy transfer. To address this, we introduce Collision Learning via Augmented Sim-to-real Hybridization (CLASH), a data-efficient framework that creates a high-fidelity hybrid simulator by learning a surrogate collision model from a minimal set of real-world data. In CLASH, a base model is first distilled from an imperfect simulator (MuJoCo) to capture general physical priors; this model is then fine-tuned with a remarkably small number of real-world interactions (as few as 10 samples) to correct for the simulator's inherent inaccuracies. The resulting hybrid simulator not only achieves higher predictive accuracy but also reduces collision computation time by nearly 50\%. We demonstrate that policies obtained with our hybrid simulator transfer more robustly to the real world, doubling the success rate in sequential pushing tasks with reinforecement learning and significantly increase the task performance with model-based control.