Scout-Rover cooperation: online terrain strength mapping and traversal risk estimation for planetary-analog explorations
作者: Shipeng Liu, J. Diego Caporale, Yifeng Zhang, Xingjue Liao, William Hoganson, Wilson Hu, Shivangi Misra, Neha Peddinti, Rachel Holladay, Ethan Fulcher, Akshay Ram Panyam, Andrik Puentes, Jordan M. Bretzfelder, Michael Zanetti, Uland Wong, Daniel E. Koditschek, Mark Yim, Douglas Jerolmack, Cynthia Sung, Feifei Qian
分类: cs.RO
发布日期: 2026-02-21
备注: 8 figures
💡 一句话要点
提出基于腿式机器人侦察和地形强度映射的行星探测车安全导航方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 行星探测 腿式机器人 轮式机器人 地形强度估计 风险感知 路径规划 机器人协同
📋 核心要点
- 现有行星探测任务在松软地形中面临挑战,传统轮式机器人易受困,限制了科学探索范围。
- 利用腿式机器人感知地形强度,构建地形图,结合探测车运动模型评估风险,指导安全路径规划。
- 实验验证了该框架在模拟行星环境中的有效性,实现了风险感知的导航,扩展了可达区域。
📝 摘要(中文)
行星表面机器人辅助探测对于理解地质过程至关重要,但许多具有科学价值的区域,如火星沙丘和月球陨石坑,由于松散、可变形的土壤而仍然危险。本文提出了一种侦察车合作框架,利用腿式和轮式机器人的混合团队来扩展对这类地形的安全访问。在该方法中,高机动性的腿式机器人作为移动侦察员,利用本体感受腿-地形交互来估计运动过程中土壤强度,并构建空间分辨的地形图。这些地图与探测车运动模型相结合,以估计穿越风险并为路径规划提供信息。通过在NASA Ames月球模拟试验台和白沙沙丘场进行的模拟任务验证了该框架。实验证明了(1)来自腿式运动的在线地形强度映射和(2)特定于探测车的穿越风险估计,从而能够安全导航到科学目标。结果表明,侦察车生成的地形图能够可靠地捕捉空间变异性并预测移动失败模式,从而实现避免危险区域的风险感知路径规划。通过将具身地形感知与异构探测车合作相结合,该框架增强了操作鲁棒性,并扩展了可到达的科学工作空间在可变形行星环境中。
🔬 方法详解
问题定义:行星探测任务中,轮式机器人在松软、可变形地形(如沙丘、陨石坑)中容易发生移动失败,导致任务中断甚至失败。现有方法主要依赖于预先设定的安全参数或简单的视觉感知,无法有效应对复杂多变的地形,限制了探测范围和效率。
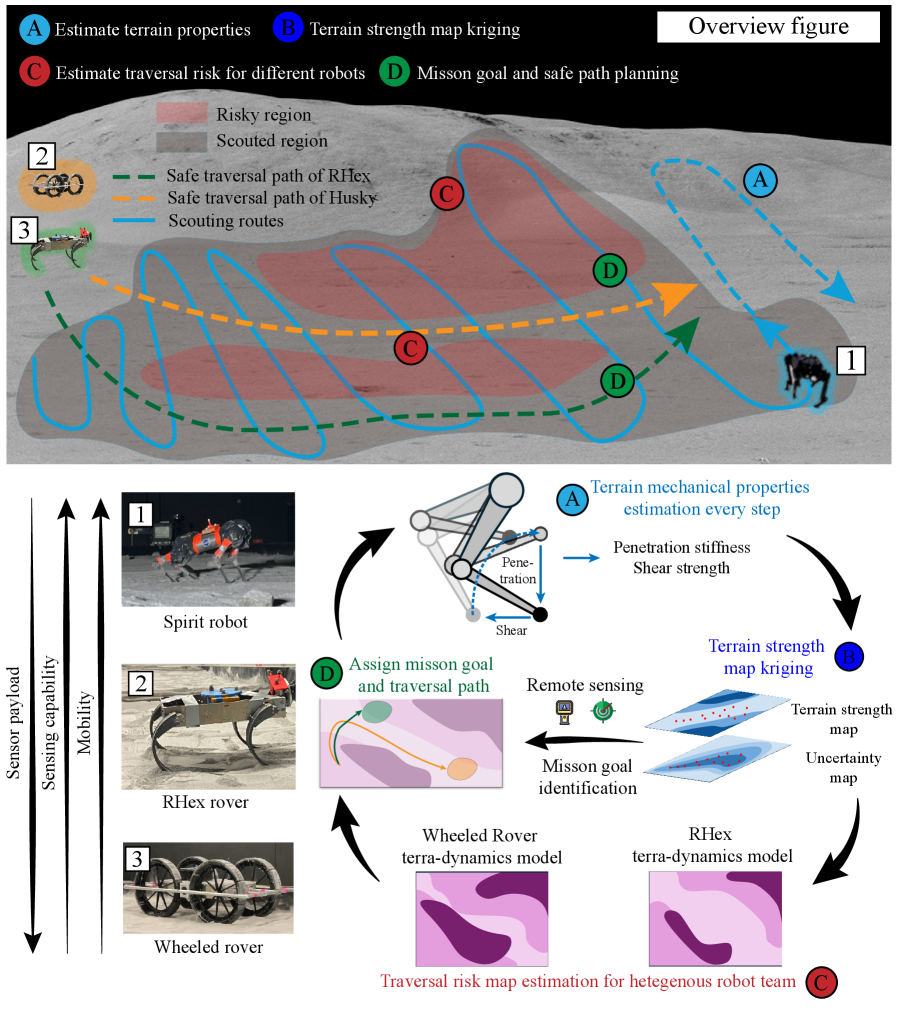
核心思路:利用腿式机器人作为先锋侦察员,通过其与地形的交互(如腿部受力、滑移等)在线估计地形强度,构建地形强度图。然后,将该地形图与轮式探测车的运动学模型相结合,预测探测车在不同区域的穿越风险,从而指导路径规划,避开高风险区域。
技术框架:该框架包含以下几个主要模块:1) 腿式机器人运动与地形交互数据采集;2) 基于腿部运动数据的地形强度估计;3) 地形强度图构建与更新;4) 轮式探测车运动模型建立;5) 基于地形图的穿越风险评估;6) 风险感知的路径规划。整体流程是腿式机器人先行侦察,生成地形图,探测车根据地形图规划安全路径。
关键创新:该方法的核心创新在于将腿式机器人的本体感受能力用于在线地形强度估计,并将其与轮式探测车的运动模型相结合,实现了风险感知的路径规划。与传统方法相比,该方法能够更准确地评估地形风险,并根据探测车的自身特性进行个性化路径规划。
关键设计:地形强度估计可能依赖于腿部受力传感器数据,采用卡尔曼滤波或其他状态估计方法融合多种传感器信息。穿越风险评估可能基于蒙特卡洛模拟或解析模型,考虑探测车的重量、轮径、地形摩擦系数等参数。路径规划算法可能采用A*算法或RRT算法,并引入风险代价函数。
🖼️ 关键图片
📊 实验亮点
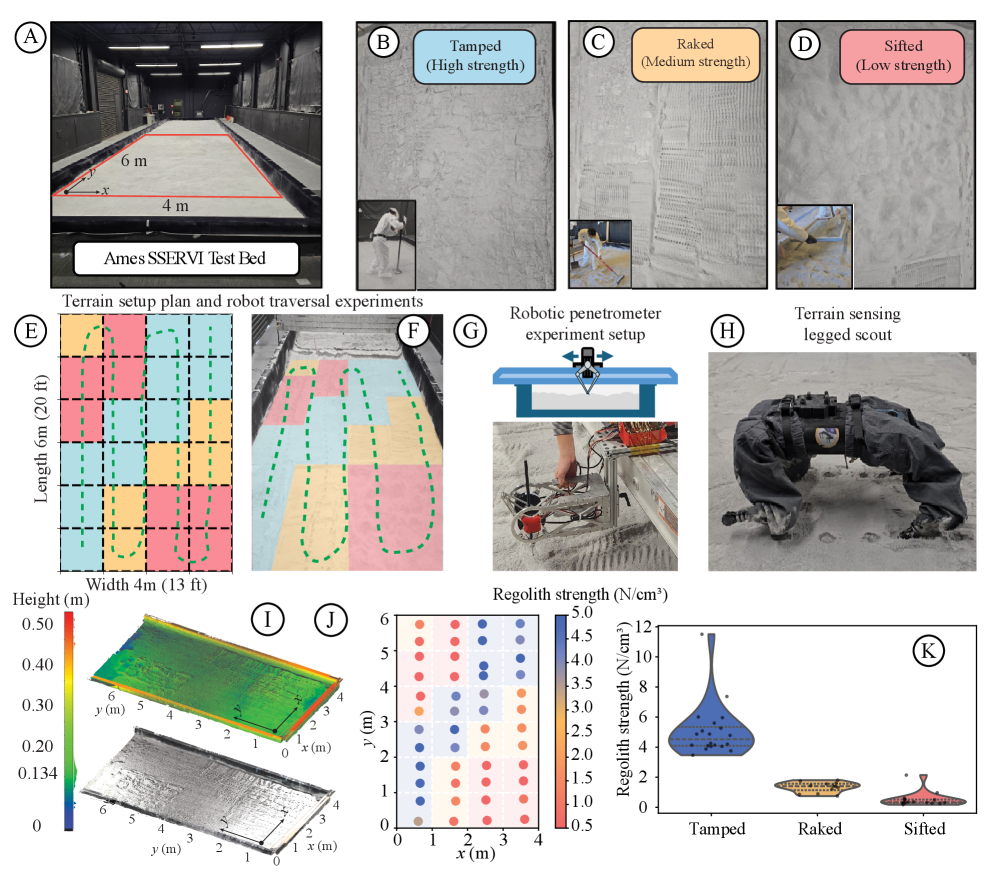
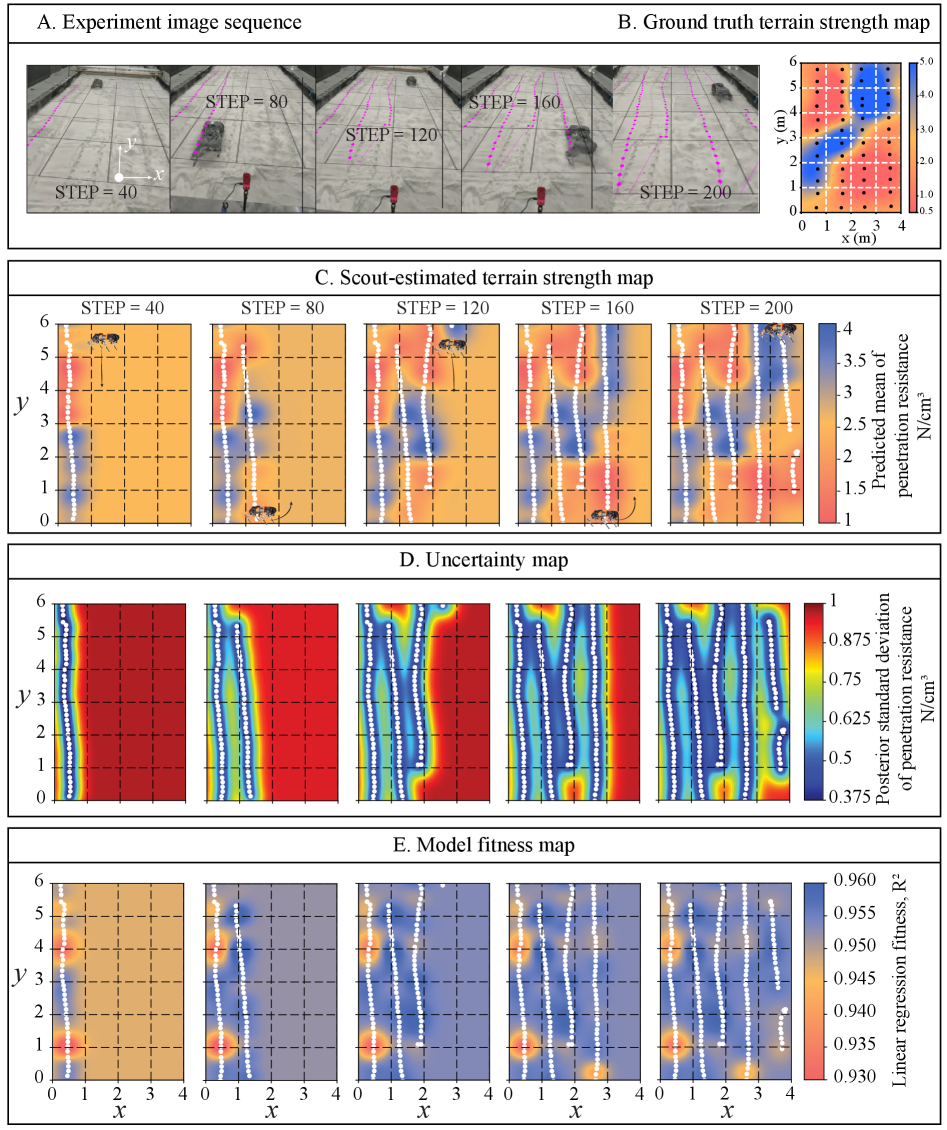
在NASA Ames月球模拟试验台和白沙沙丘场进行的实验表明,腿式机器人生成的地形图能够准确反映地形强度的空间变化,并有效预测轮式探测车的移动失败模式。通过风险感知的路径规划,探测车能够成功避开高风险区域,安全到达目标地点,显著提高了任务成功率。具体性能数据未知,但定性结果表明该方法具有显著优势。
🎯 应用场景
该研究成果可应用于未来的行星探测任务,尤其是在火星、月球等具有复杂地形的星球表面。通过腿式机器人与轮式探测车的协同工作,可以显著提高探测任务的安全性、效率和科学价值,扩展对未知区域的探索范围,获取更多有价值的科学数据。此外,该方法也可应用于地面救援、灾后搜救等场景。
📄 摘要(原文)
Robot-aided exploration of planetary surfaces is essential for understanding geologic processes, yet many scientifically valuable regions, such as Martian dunes and lunar craters, remain hazardous due to loose, deformable regolith. We present a scout-rover cooperation framework that expands safe access to such terrain using a hybrid team of legged and wheeled robots. In our approach, a high-mobility legged robot serves as a mobile scout, using proprioceptive leg-terrain interactions to estimate regolith strength during locomotion and construct spatially resolved terrain maps. These maps are integrated with rover locomotion models to estimate traversal risk and inform path planning. We validate the framework through analogue missions at the NASA Ames Lunar Simulant Testbed and the White Sands Dune Field. Experiments demonstrate (1) online terrain strength mapping from legged locomotion and (2) rover-specific traversal-risk estimation enabling safe navigation to scientific targets. Results show that scout-generated terrain maps reliably capture spatial variability and predict mobility failure modes, allowing risk-aware path planning that avoids hazardous regions. By combining embodied terrain sensing with heterogeneous rover cooperation, this framework enhances operational robustness and expands the reachable science workspace in deformable planetary environments.