Soft Surfaced Vision-Based Tactile Sensing for Bipedal Robot Applications
作者: Jaeeun Kim, Junhee Lim, Yu She
分类: cs.RO
发布日期: 2026-02-20
备注: 8 pages, 11 figures, RoboSoft 2026. For the supplementary video, please visit: https://youtu.be/ceJiy9q_2Aw
💡 一句话要点
提出基于视觉的软表面触觉足传感器,提升双足机器人平衡与环境感知能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉传感 双足机器人 视觉触觉 软体机器人 环境感知
📋 核心要点
- 双足机器人依赖本体感觉进行运动,但缺乏与环境的直接触觉感知,限制了其在复杂地形下的稳定性和适应性。
- 该论文提出一种软表面、基于视觉的触觉足传感器,通过捕捉足底与地面接触时的形变图像,提取丰富的触觉信息。
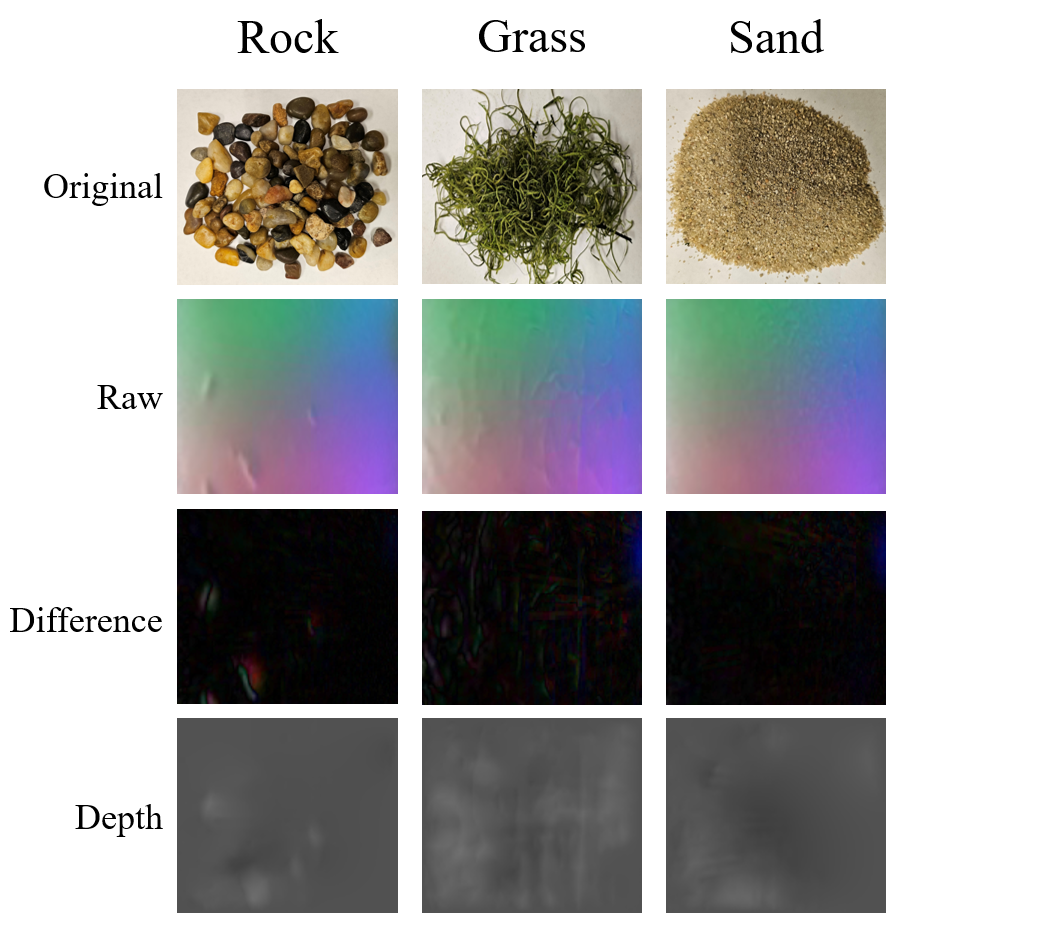
- 实验表明,该传感器能够有效估计接触姿态、压力中心,并进行地形分类,显著提升双足机器人在复杂环境下的平衡控制能力。
📝 摘要(中文)
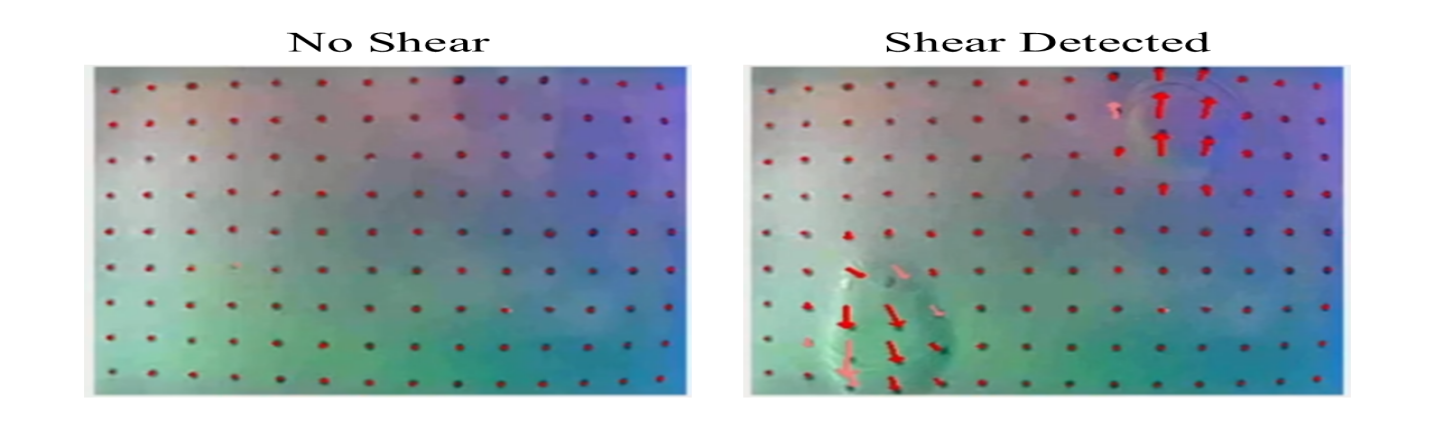
本文提出了一种基于视觉的软表面触觉足传感器,旨在为双足机器人提供类皮肤的可变形层,通过光学方式捕捉接触变形,将足部与地面的交互转化为丰富的触觉信号。该方法从接触图像流中估计接触姿态(位置和方向),可视化剪切力,计算压力中心(CoP),分类地形,并检测接触区域的几何特征。在倾斜平台和视觉遮挡条件下验证了这些能力,结果表明,足部触觉反馈能够改善平衡控制和地形感知,超越了仅依靠本体感觉的效果。研究表明,将触觉感知集成到腿式机器人足部可以提高稳定性、适应性和环境感知能力,为更柔顺和智能的运动系统提供了一个有希望的方向。
🔬 方法详解
问题定义:双足机器人在复杂地形上的稳定行走依赖于精确的环境感知。然而,传统的本体感觉信息不足以提供充分的地面接触信息,尤其是在视觉受限或地形崎岖的情况下。现有的触觉传感器通常较为昂贵或难以集成到机器人足部,限制了其在实际应用中的可行性。因此,需要一种低成本、易于集成且能提供丰富触觉信息的足部传感器,以提升双足机器人的环境适应能力。
核心思路:该论文的核心思路是利用软表面材料和视觉传感器的结合,将足底与地面的接触形变转化为图像信息。通过分析这些图像,可以提取出接触姿态、压力分布、地形类型等关键触觉特征。这种方法的优势在于成本较低、易于集成,并且能够提供比传统触觉传感器更丰富的触觉信息。软表面材料的选择至关重要,需要兼顾形变能力和耐用性。
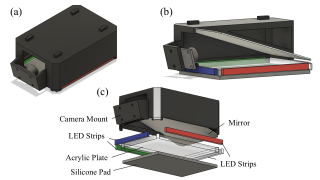
技术框架:该系统的整体架构包括:1)软表面足部:由可变形的弹性材料制成,与地面接触时会发生形变;2)视觉传感器:安装在足部内部,用于捕捉软表面形变的图像;3)图像处理模块:对图像进行预处理、特征提取和分析,估计接触姿态、压力中心等触觉信息;4)控制模块:根据触觉信息调整机器人的运动控制策略,实现稳定行走。整个流程是从物理接触到图像采集,再到触觉信息提取和控制决策。
关键创新:该论文的关键创新在于将软表面触觉传感与视觉技术相结合,实现了一种低成本、高灵敏度的足部触觉传感器。与传统的力/扭矩传感器相比,该方法能够提供更丰富的触觉信息,例如接触面的几何特征和剪切力分布。此外,该方法还能够进行地形分类,从而使机器人能够根据不同的地形调整运动策略。这种基于视觉的触觉感知方法为机器人与环境的交互提供了新的可能性。
关键设计:软表面材料的选择需要根据具体的应用场景进行优化,需要考虑材料的硬度、弹性、耐磨性等因素。视觉传感器的分辨率和帧率也会影响触觉信息的精度和实时性。图像处理算法的设计需要能够有效地提取出接触形变的特征,例如边缘、纹理等。此外,还需要设计合适的校准方法,以消除视觉传感器的误差和软表面材料的非线性形变。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该触觉足传感器能够准确估计接触姿态和压力中心,并在倾斜平台上显著提升了双足机器人的平衡控制能力。在视觉遮挡条件下,该传感器仍然能够有效地进行地形分类,表明其具有较强的鲁棒性。与仅依靠本体感觉的控制策略相比,使用该触觉传感器能够显著降低机器人的跌倒风险,提高了机器人在复杂环境下的适应能力。
🎯 应用场景
该研究成果可广泛应用于双足机器人、假肢、康复机器人等领域。在双足机器人领域,该传感器能够提升机器人在复杂地形下的行走稳定性和环境适应性。在假肢领域,该传感器能够为截肢者提供更自然的触觉反馈,提高假肢的控制精度和舒适度。在康复机器人领域,该传感器能够用于评估患者的步态和平衡能力,并为康复训练提供指导。
📄 摘要(原文)
Legged locomotion benefits from embodied sensing, where perception emerges from the physical interaction between body and environment. We present a soft-surfaced, vision-based tactile foot sensor that endows a bipedal robot with a skin-like deformable layer that captures contact deformations optically, turning foot-ground interactions into rich haptic signals. From a contact image stream, our method estimates contact pose (position and orientation), visualizes shear, computes center of pressure (CoP), classifies terrain, and detects geometric features of the contact patch. We validate these capabilities on a tilting platform and in visually obscured conditions, showing that foot-borne tactile feedback improves balance control and terrain awareness beyond proprioception alone. These findings suggest that integrating tactile perception into legged robot feet improves stability, adaptability, and environmental awareness, offering a promising direction toward more compliant and intelligent locomotion systems. For the supplementary video, please visit: https://youtu.be/ceJiy9q_2Aw