Snapping Actuators with Asymmetric and Sequenced Motion
作者: Xin Li, Ye Jin, Mohsen Jafarpour, Hugo de Souza Oliveira, Edoardo Milana
分类: cs.RO, cond-mat.soft
发布日期: 2026-02-20
备注: 9th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2026)
💡 一句话要点
提出基于几何诱导不稳定性的非对称吸动器,实现可控软体机器人运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 吸动器 非对称运动 几何不稳定性 气动驱动
📋 核心要点
- 软体机器人驱动面临快速性和能量效率的挑战,现有方法难以兼顾。
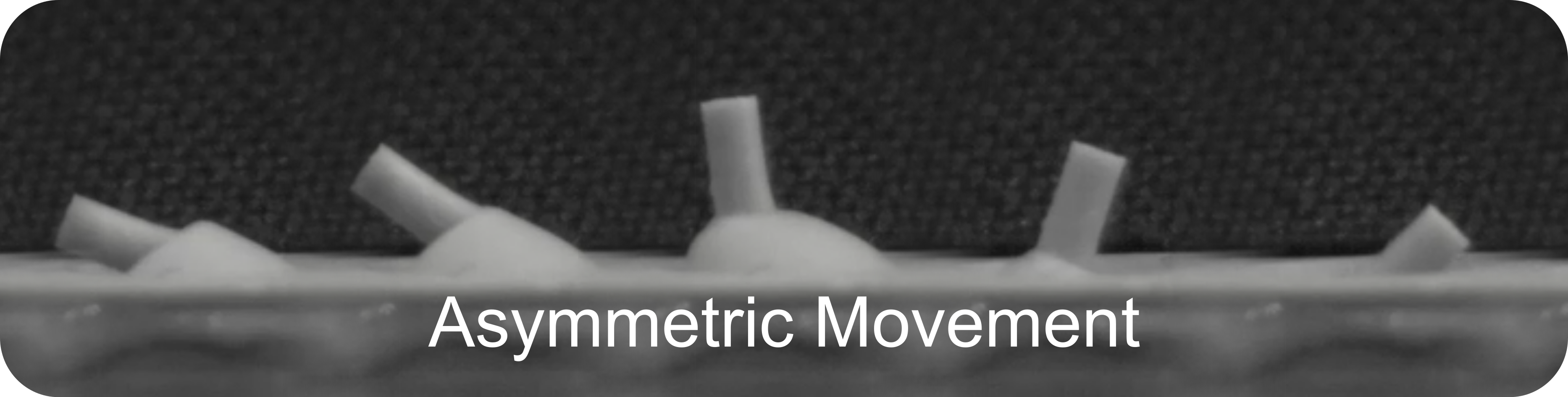
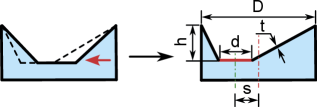
- 利用软结构中的吸动不稳定性,设计偏心穹顶形吸动器,实现几何诱导的非对称运动。
- 四足机器人实验验证了该吸动器的有效性,在特定频率下实现了较高的运动速度。
📝 摘要(中文)
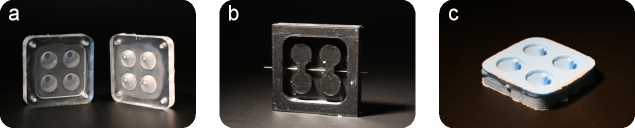
本研究开发了一种偏心穹顶形吸动器,通过几何诱导的不稳定性产生可控的非对称运动,从而实现快速且节能的驱动。有限元模拟和实验结果均表明,该吸动器具有一致的非对称变形和相应的压力特性。通过将四个吸动器耦合到一个气动网络中,一个紧凑的四足机器人仅使用单一压力输入即可实现协调的波浪式运动。该机器人表现出频率相关的性能,在7.5赫兹时达到72.78毫米/秒的最大速度。这些发现证明了非对称吸动机制在物理控制驱动方面的潜力,并为完全无线且高效的软体机器人系统奠定了基础。
🔬 方法详解
问题定义:现有软体机器人驱动方法通常在快速性和能量效率之间难以取得平衡。传统方法可能需要复杂的控制系统或多个驱动器来实现复杂的运动,这增加了系统的复杂性和能量消耗。因此,需要一种简单、高效且可控的驱动机制来实现软体机器人的运动。
核心思路:本研究的核心思路是利用软结构中的吸动不稳定性,通过巧妙的几何设计来实现可控的非对称运动。具体而言,设计了一种偏心穹顶形的吸动器,其几何形状能够诱导特定的变形模式,从而实现非对称的运动输出。这种设计简化了控制需求,并提高了能量效率。
技术框架:该研究的技术框架主要包括以下几个阶段:1) 设计并制造偏心穹顶形吸动器;2) 通过有限元模拟分析吸动器的变形行为和压力特性;3) 进行实验验证,测量吸动器的变形和压力响应;4) 将多个吸动器耦合到一个气动网络中,构建四足机器人;5) 通过控制单一压力输入,实现机器人的波浪式运动,并评估其性能。
关键创新:该研究的关键创新在于利用几何诱导的不稳定性来实现可控的非对称运动。与传统的对称吸动器相比,偏心穹顶形吸动器能够产生更复杂的运动模式,从而为软体机器人提供更灵活的驱动方式。此外,通过将多个吸动器耦合到一个气动网络中,实现了仅使用单一压力输入即可控制复杂运动的功能。
关键设计:偏心穹顶形吸动器的关键设计参数包括穹顶的半径、厚度和偏心距。这些参数决定了吸动器的变形模式和压力响应。在实验中,通过调整压力输入和频率,可以控制机器人的运动速度和步态。此外,气动网络的拓扑结构也对机器人的运动性能有重要影响。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该吸动器能够产生一致的非对称变形,并且其压力特性与有限元模拟结果相符。四足机器人实验表明,通过控制单一压力输入,机器人能够实现协调的波浪式运动,在7.5赫兹时达到72.78毫米/秒的最大速度。该速度明显优于某些同类型的软体机器人。
🎯 应用场景
该研究成果可应用于医疗机器人、康复设备、探索机器人等领域。非对称吸动器能够实现更精细和复杂的运动控制,例如在微创手术中进行精准操作,或在复杂地形中进行探索。此外,该技术还有助于开发更轻便、更节能的软体机器人,从而扩展其应用范围。
📄 摘要(原文)
Snapping instabilities in soft structures offer a powerful pathway to achieve rapid and energy-efficient actuation. In this study, an eccentric dome-shaped snapping actuator is developed to generate controllable asymmetric motion through geometry-induced instability. Finite element simulations and experiments reveal consistent asymmetric deformation and the corresponding pressure characteristics. By coupling four snapping actuators in a pneumatic network, a compact quadrupedal robot achieves coordinated wavelike locomotion using only a single pressure input. The robot exhibits frequency-dependent performance with a maximum speed of 72.78~mm/s at 7.5~Hz. These findings demonstrate the potential of asymmetric snapping mechanisms for physically controlled actuation and lay the groundwork for fully untethered and efficient soft robotic systems.