Role-Adaptive Collaborative Formation Planning for Team of Quadruped Robots in Cluttered Environments
作者: Magnus Norén, Marios-Nektarios Stamatopoulos, Avijit Banerjee, George Nikolakopoulos
分类: cs.RO
发布日期: 2026-02-20
💡 一句话要点
提出一种角色自适应的四足机器人集群编队规划方法,解决复杂环境下的协同导航问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 集群编队 角色自适应 复杂环境导航 避障 领导者-跟随者 虚拟弹簧-阻尼系统
📋 核心要点
- 传统编队方法在复杂环境中难以适应,常因固定角色或刚性结构导致碰撞和效率低下。
- 该方法通过动态角色分配和局部目标规划,使机器人能灵活调整编队,避开障碍,保持整体目标。
- 仿真和真实实验表明,该方法能有效协调四足机器人集群,在复杂环境中实现鲁棒的编队导航。
📝 摘要(中文)
本文提出了一种基于领导者-跟随者的角色自适应编队规划与控制框架,用于四足机器人集群在复杂环境中运行。与固定领导者或刚性编队角色的传统方法不同,该方法集成了动态角色分配和局部目标规划,从而在复杂场景中实现灵活、无碰撞的导航。通过虚拟弹簧-阻尼系统以及自适应调整每个智能体速度的新型避障层,确保了编队稳定性和机器人间的安全。动态前瞻参考生成器进一步增强了灵活性,允许临时编队变形以绕过障碍物,同时保持目标导向的运动。快速行进平方(FM2)算法为领导者提供全局路径,并为跟随者提供局部路径,作为规划的骨干。通过大量的仿真和真实的四足机器人集群实验验证了该框架。结果表明,在复杂的非结构化环境中,该方法能够实现平滑的协调、自适应的角色切换和鲁棒的编队维护。
🔬 方法详解
问题定义:该论文旨在解决四足机器人集群在复杂、非结构化环境中进行编队导航的问题。现有方法通常采用固定领导者或刚性编队结构,难以适应动态变化的环境,容易发生碰撞,且整体效率较低。痛点在于缺乏灵活性和自适应性,无法在保证编队稳定性的同时有效避开障碍物。
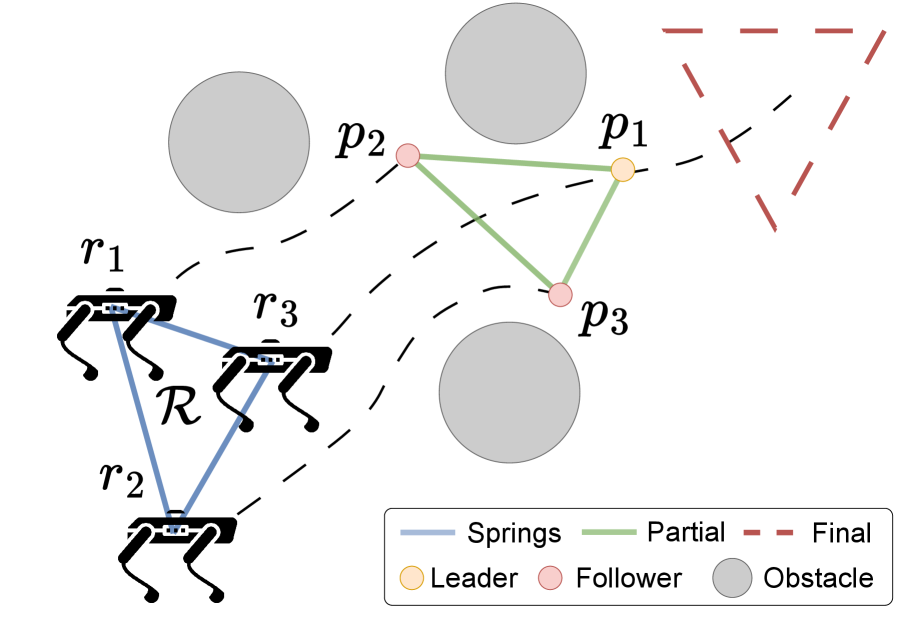
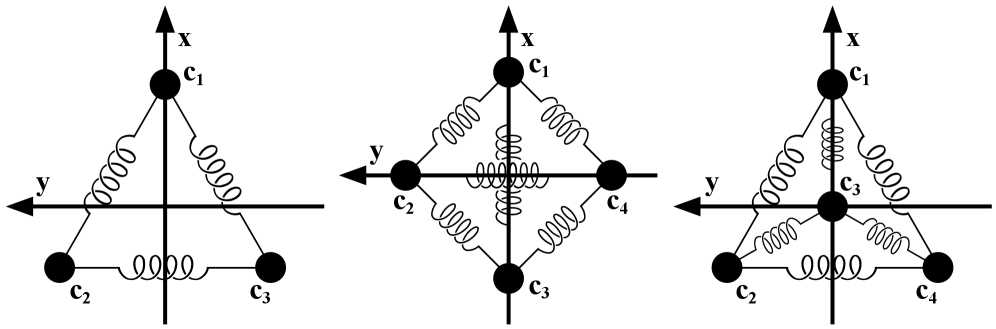
核心思路:核心思路是引入角色自适应机制,允许机器人在领导者和跟随者之间动态切换,并结合局部目标规划,使每个机器人能够根据环境变化调整自身行为。通过虚拟弹簧-阻尼系统维持编队结构,并设计自适应避障层,确保机器人间的安全距离。这种方法旨在提高编队在复杂环境中的灵活性和鲁棒性。
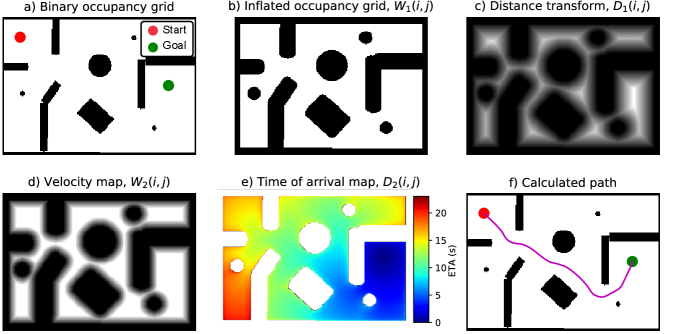
技术框架:整体框架包含以下几个主要模块:1) 全局路径规划:使用快速行进平方(FM2)算法为领导者生成全局路径。2) 局部路径规划:跟随者基于领导者的路径和自身位置,使用FM2算法生成局部路径。3) 角色分配:根据环境和任务需求,动态分配领导者和跟随者角色。4) 编队控制:采用虚拟弹簧-阻尼系统维持编队结构,并结合自适应避障层,调整机器人的速度和方向。5) 前瞻参考生成:生成动态前瞻参考点,允许编队临时变形以绕过障碍物。
关键创新:最重要的技术创新点在于角色自适应机制和自适应避障层。角色自适应允许机器人在领导者和跟随者之间动态切换,提高了编队的灵活性。自适应避障层能够根据障碍物的位置和距离,动态调整机器人的速度和方向,确保机器人间的安全距离,避免碰撞。与现有方法的本质区别在于,该方法能够根据环境变化动态调整编队结构和机器人行为,从而更好地适应复杂环境。
关键设计:虚拟弹簧-阻尼系统的参数(如弹簧刚度和阻尼系数)需要根据机器人的动力学特性和编队要求进行调整。自适应避障层的设计需要考虑障碍物的检测范围、避障优先级和速度调整策略。FM2算法的参数(如步长和搜索范围)需要根据环境的复杂度和机器人的运动能力进行调整。动态前瞻参考生成器的设计需要平衡编队的稳定性和避障能力。
🖼️ 关键图片
📊 实验亮点
通过仿真和真实实验验证了该框架的有效性。实验结果表明,该方法能够实现平滑的协调、自适应的角色切换和鲁棒的编队维护。在复杂环境中,机器人集群能够成功避开障碍物,并保持稳定的编队结构。视频展示了仿真和物理实验及其相关可视化效果,进一步验证了该方法的实用性。
🎯 应用场景
该研究成果可应用于搜救、侦察、环境监测等领域,尤其是在复杂、非结构化环境中。例如,在灾后救援中,四足机器人集群可以协同搜索幸存者,并避开倒塌的建筑物。在环境监测中,机器人集群可以协同收集数据,并绘制环境地图。该研究的实际价值在于提高了机器人集群在复杂环境中的自主性和协同能力,未来有望应用于更多实际场景。
📄 摘要(原文)
This paper presents a role-adaptive Leader-Follower-based formation planning and control framework for teams of quadruped robots operating in cluttered environments. Unlike conventional methods with fixed leaders or rigid formation roles, the proposed approach integrates dynamic role assignment and partial goal planning, enabling flexible, collision-free navigation in complex scenarios. Formation stability and inter-robot safety are ensured through a virtual spring-damper system coupled with a novel obstacle avoidance layer that adaptively adjusts each agent's velocity. A dynamic look-ahead reference generator further enhances flexibility, allowing temporary formation deformation to maneuver around obstacles while maintaining goal-directed motion. The Fast Marching Square (FM2) algorithm provides the global path for the leader and local paths for the followers as the planning backbone. The framework is validated through extensive simulations and real-world experiments with teams of quadruped robots. Results demonstrate smooth coordination, adaptive role switching, and robust formation maintenance in complex, unstructured environments. A video featuring the simulation and physical experiments along with their associated visualizations can be found at https://youtu.be/scq37Tua9W4.