Graph Neural Model Predictive Control for High-Dimensional Systems
作者: Patrick Benito Eberhard, Luis Pabon, Daniele Gammelli, Hugo Buurmeijer, Amon Lahr, Mark Leone, Andrea Carron, Marco Pavone
分类: cs.RO
发布日期: 2026-02-19
💡 一句话要点
提出基于图神经网络模型预测控制框架,实现高维系统实时控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 图神经网络 模型预测控制 高维系统 软体机器人 实时控制
📋 核心要点
- 高维系统控制面临复杂动力学建模和计算效率的双重挑战,现有方法难以兼顾。
- 利用图神经网络对系统动力学进行建模,并结合结构化模型预测控制,实现高效的实时控制。
- 实验表明,该方法在软体机器人控制中表现出色,实现了高精度跟踪和有效的避障。
📝 摘要(中文)
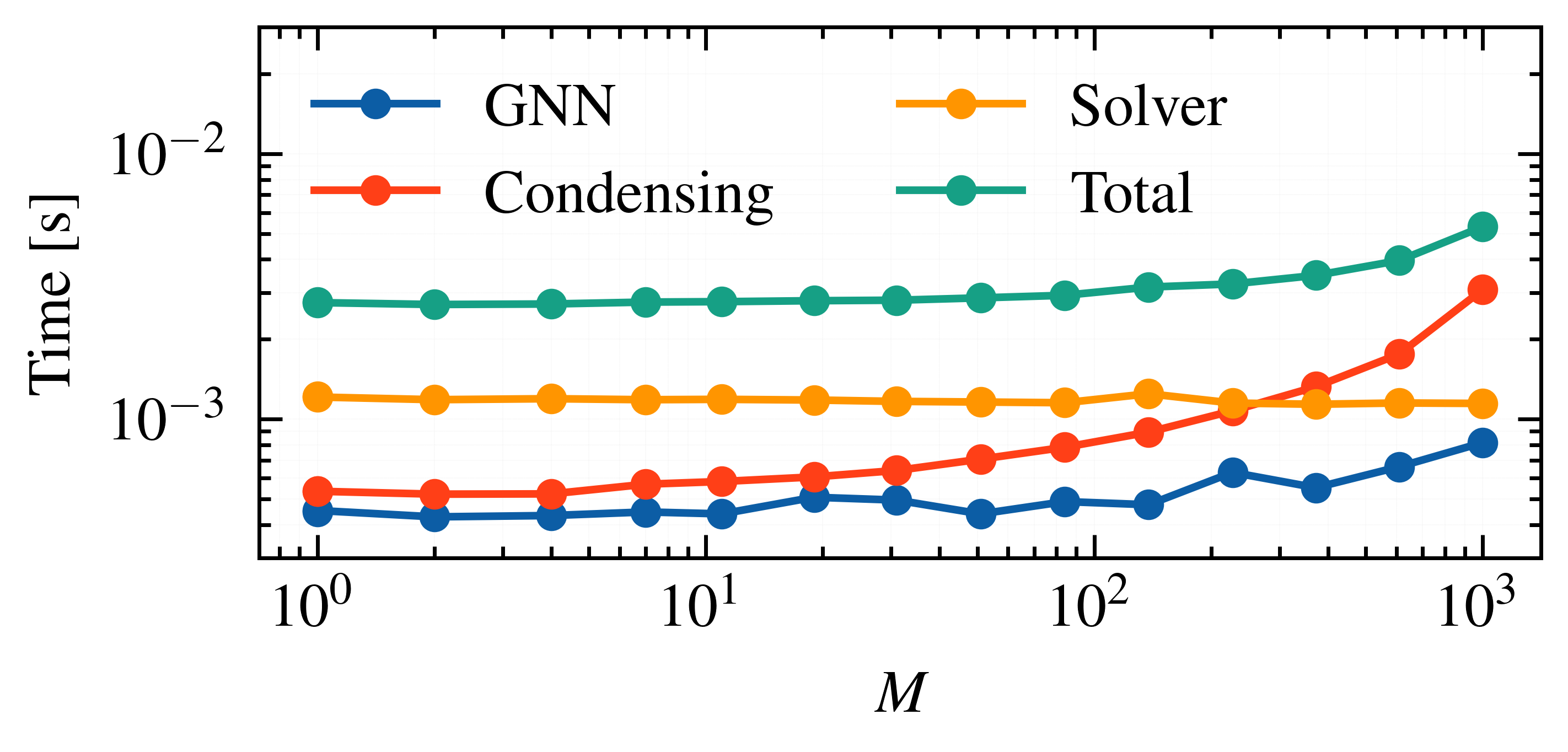
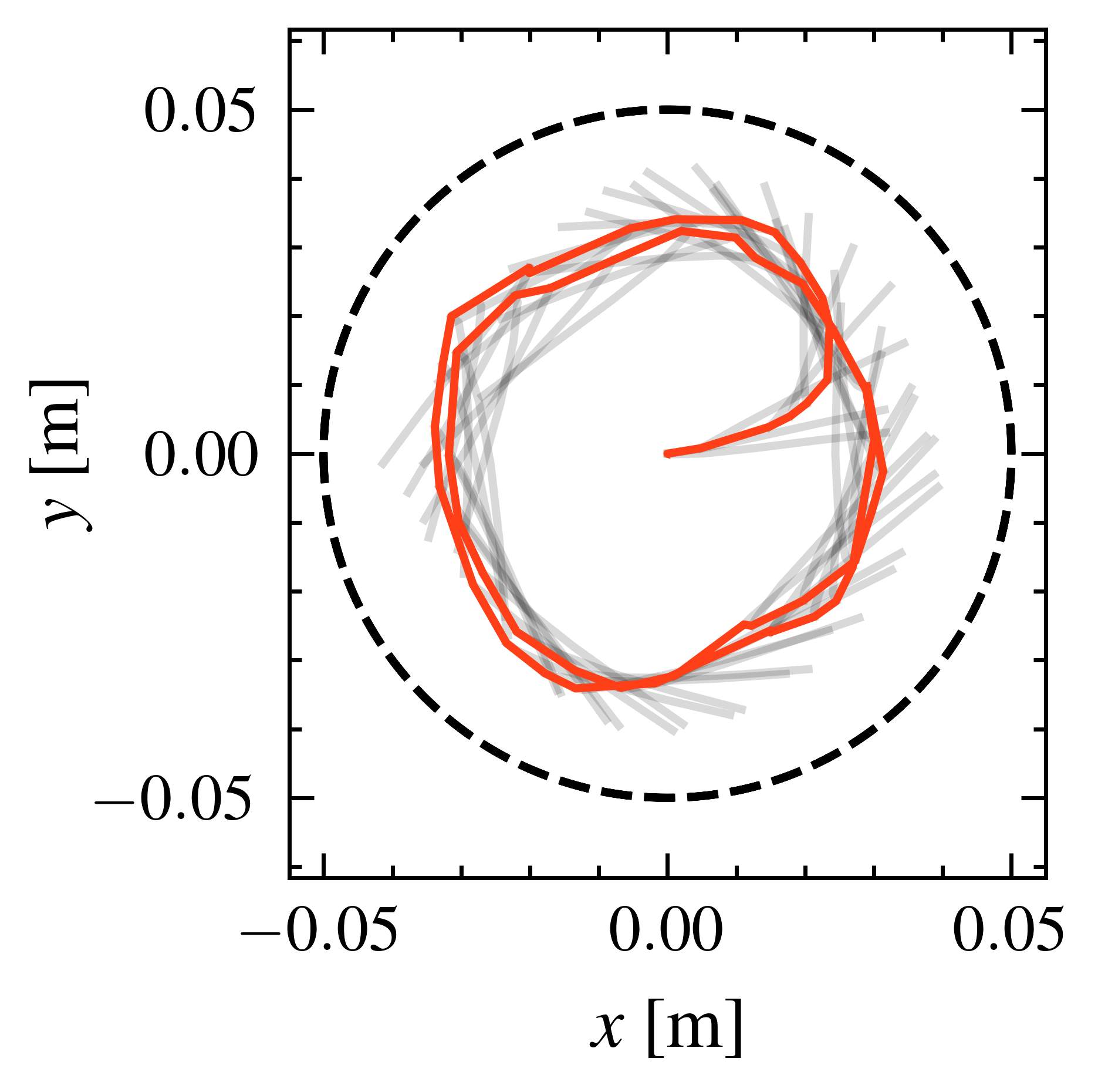
本文提出了一种将基于图神经网络(GNN)的动力学模型与结构化模型预测控制相结合的框架,旨在实现高维系统的实时控制,例如软体机器人。通过将系统表示为具有局部交互的图,GNN保留了稀疏性。同时,定制的压缩算法消除了控制问题中的状态变量,确保了高效计算。该压缩算法的复杂度与系统节点的数量呈线性关系,并利用图形处理器(GPU)并行化来实现实时性能。该方法在仿真和物理软体机器人躯干上进行了实验验证。结果表明,该方法能够以100 Hz的频率扩展到具有多达1,000个节点的系统,并在硬件上实现了亚厘米级的实时参考跟踪,性能优于基线方法63.6%。最后,展示了该方法实现有效全身避障的能力。
🔬 方法详解
问题定义:高维系统的控制,例如软体机器人,需要能够准确捕捉复杂动力学且计算上易于处理的模型。现有的模型预测控制方法在高维系统中的计算复杂度过高,难以实现实时控制。传统的动力学模型可能无法有效捕捉软体机器人的复杂形变和非线性特性。
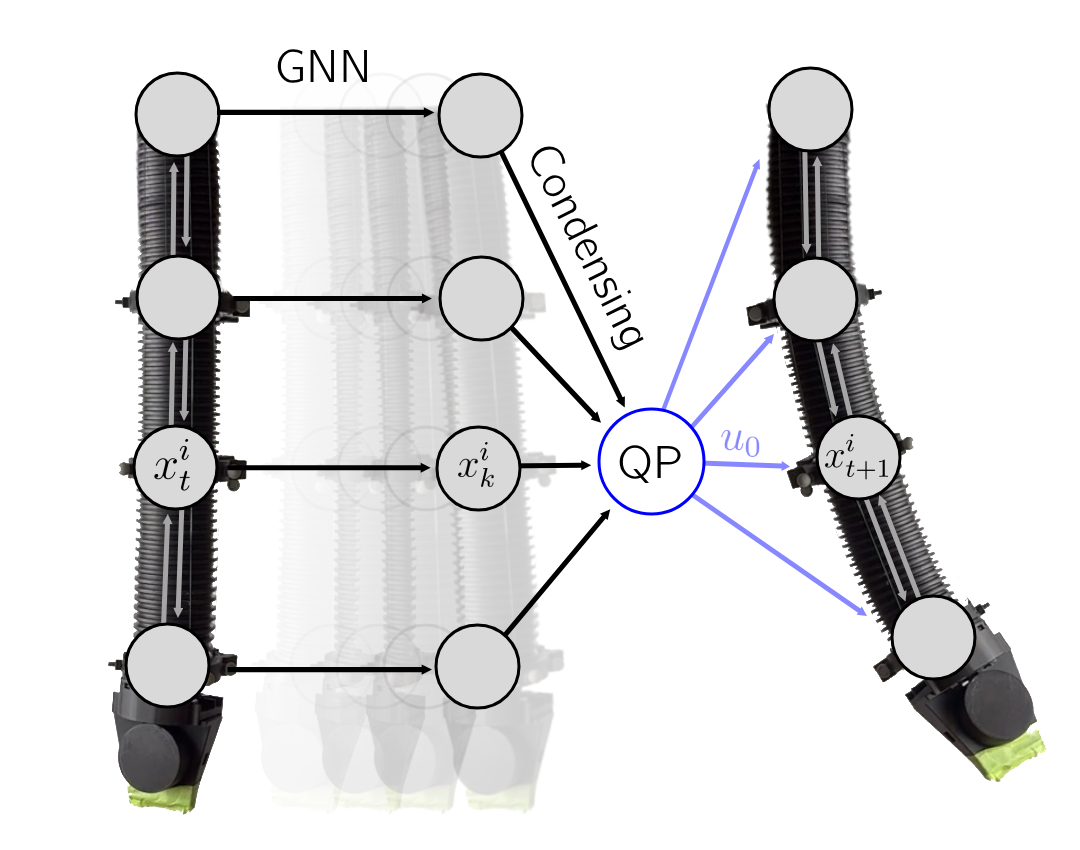
核心思路:利用图神经网络(GNN)来学习系统的动力学模型,并结合结构化的模型预测控制(MPC)方法。GNN能够有效地捕捉系统中节点之间的局部交互,从而保持模型的稀疏性,降低计算复杂度。通过定制的压缩算法,进一步减少MPC问题中的状态变量,提高计算效率。
技术框架:该框架主要包含以下几个模块:1) 基于GNN的动力学模型学习模块:使用GNN学习高维系统的动力学模型,将系统表示为一个图,节点代表系统的状态,边代表节点之间的交互。2) 结构化模型预测控制模块:利用学习到的动力学模型,设计MPC控制器,实现对系统的控制。3) 压缩算法模块:通过定制的压缩算法,消除MPC问题中的状态变量,降低计算复杂度。4) GPU并行化模块:利用GPU进行并行计算,进一步提高计算效率。
关键创新:该方法的核心创新在于将GNN与结构化MPC相结合,并提出了定制的压缩算法。GNN能够有效地学习高维系统的动力学模型,而结构化MPC和压缩算法能够降低计算复杂度,从而实现实时控制。与传统的MPC方法相比,该方法能够处理更高维度的系统,并实现更快的控制频率。
关键设计:GNN的网络结构设计需要根据具体的系统进行调整,例如可以选择不同的消息传递机制和聚合函数。压缩算法的关键在于如何选择需要消除的状态变量,以及如何保证压缩后的模型仍然能够准确地描述系统的动力学。MPC控制器的设计需要考虑控制目标和约束条件,例如可以设计二次规划(QP)问题来求解最优控制策略。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法能够以100 Hz的频率控制具有多达1,000个节点的系统。在物理软体机器人躯干上的实验结果表明,该方法能够实现亚厘米级的实时参考跟踪,性能优于基线方法63.6%。此外,该方法还展示了实现有效全身避障的能力,验证了其在高维系统控制中的有效性。
🎯 应用场景
该研究成果可广泛应用于高维系统的控制领域,例如软体机器人、多智能体系统、柔性结构等。在软体机器人领域,可以实现对复杂形变的精确控制,从而完成各种复杂的任务,如抓取、操作、导航等。在多智能体系统领域,可以实现对多个智能体的协同控制,从而完成更复杂的任务,如编队飞行、协同搜索等。该方法具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
The control of high-dimensional systems, such as soft robots, requires models that faithfully capture complex dynamics while remaining computationally tractable. This work presents a framework that integrates Graph Neural Network (GNN)-based dynamics models with structure-exploiting Model Predictive Control to enable real-time control of high-dimensional systems. By representing the system as a graph with localized interactions, the GNN preserves sparsity, while a tailored condensing algorithm eliminates state variables from the control problem, ensuring efficient computation. The complexity of our condensing algorithm scales linearly with the number of system nodes, and leverages Graphics Processing Unit (GPU) parallelization to achieve real-time performance. The proposed approach is validated in simulation and experimentally on a physical soft robotic trunk. Results show that our method scales to systems with up to 1,000 nodes at 100 Hz in closed-loop, and demonstrates real-time reference tracking on hardware with sub-centimeter accuracy, outperforming baselines by 63.6%. Finally, we show the capability of our method to achieve effective full-body obstacle avoidance.