RA-Nav: A Risk-Aware Navigation System Based on Semantic Segmentation for Aerial Robots in Unpredictable Environments
作者: Ziyi Zong, Xin Dong, Jinwu Xiang, Daochun Li, Zhan Tu
分类: cs.RO
发布日期: 2026-02-19
💡 一句话要点
提出基于语义分割的风险感知导航系统RA-Nav,用于空中机器人在突变环境中的安全导航。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 空中机器人导航 语义分割 风险感知 路径规划 轨迹优化 环境感知 自主导航
📋 核心要点
- 现有空中机器人导航方法难以应对静态障碍物突发移动的情况,缺乏对环境潜在风险的感知和适应能力。
- RA-Nav通过轻量级语义分割网络识别障碍物类型,并设计风险估计函数,构建风险地图,实现风险感知的路径规划。
- 实验表明,RA-Nav在障碍物状态突变场景中,导航成功率优于现有方法,并在真实数据模拟中验证了其有效性。
📝 摘要(中文)
现有的空中机器人导航系统通常规划绕过静态和动态障碍物的路径,但当静态障碍物突然移动时无法适应。集成环境语义感知能够估计突然移动的障碍物带来的潜在风险。本文提出了一种基于语义分割的风险感知导航框架RA-Nav。一个轻量级多尺度语义分割网络实时识别障碍物类别。这些障碍物进一步分为三类:静止的、暂时静止的和动态的。针对每种类型,设计了相应的风险估计函数,以实现实时风险预测,并在此基础上构建完整的局部风险图。基于该地图,设计了风险知情的路径搜索算法,以保证规划平衡路径效率和安全性。然后应用轨迹优化来生成安全、平滑且动态可行的轨迹。比较模拟表明,RA-Nav在突然的障碍物状态转换场景中实现了比基线更高的成功率。其有效性在利用真实世界数据的模拟中得到了进一步验证。
🔬 方法详解
问题定义:现有空中机器人的导航系统主要关注静态和动态障碍物的规避,但忽略了环境中潜在的风险,尤其是在静态障碍物突然变为动态时,导航系统无法及时调整,导致导航失败。因此,需要一种能够感知环境语义信息,并对潜在风险进行评估的导航系统。
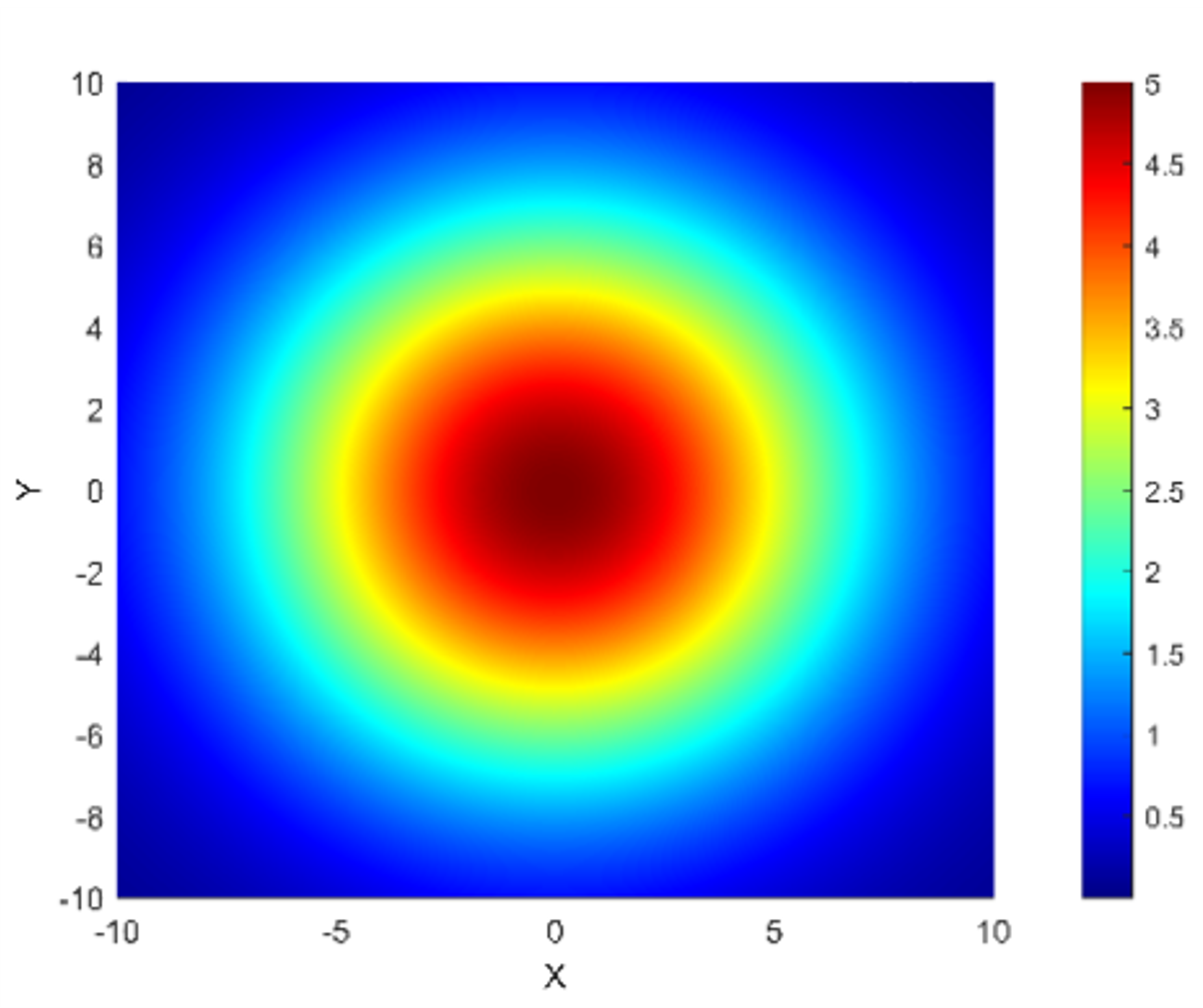
核心思路:RA-Nav的核心思路是利用语义分割技术识别环境中的不同类型的障碍物,并根据其类型(静态、暂时静态、动态)设计不同的风险评估函数,从而构建一个综合的风险地图。然后,基于该风险地图进行路径规划,使得机器人能够避开高风险区域,从而提高导航的安全性。
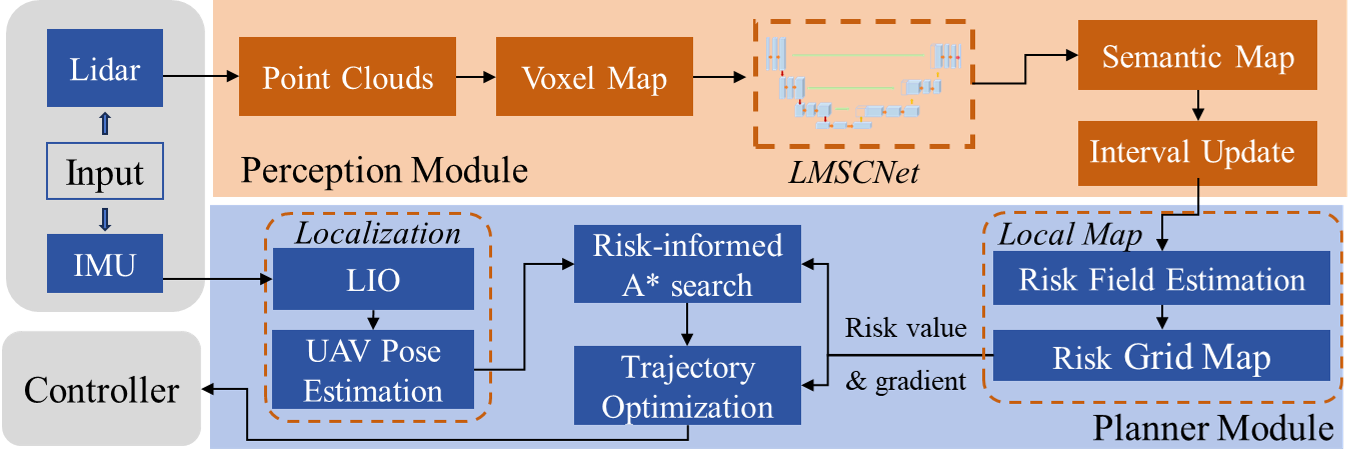
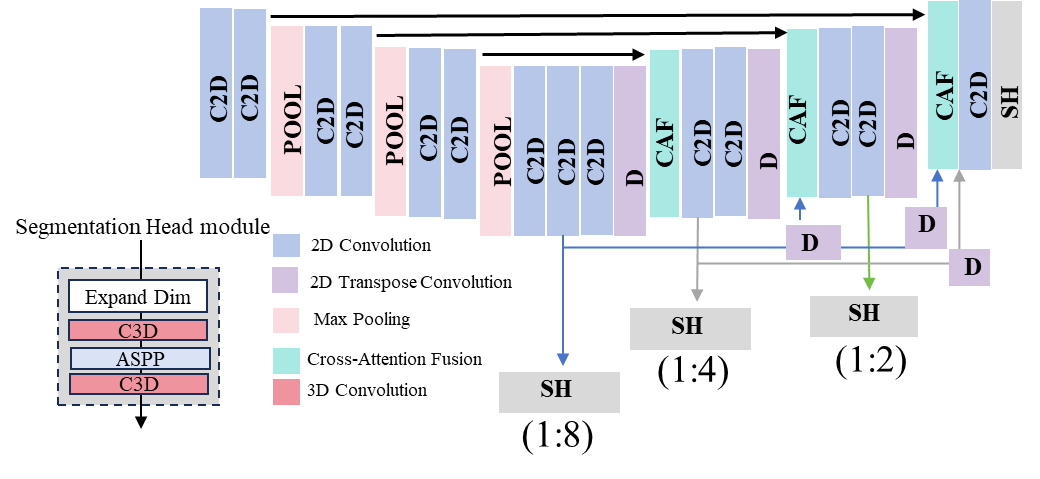
技术框架:RA-Nav的整体框架包括以下几个主要模块:1) 语义分割模块:使用轻量级多尺度语义分割网络,实时识别环境中的障碍物类别。2) 风险评估模块:根据障碍物类型,设计相应的风险评估函数,计算每个障碍物的风险值,并构建局部风险地图。3) 路径规划模块:基于风险地图,使用风险知情的路径搜索算法,生成一条既高效又安全的路径。4) 轨迹优化模块:对路径进行优化,生成安全、平滑且动态可行的轨迹。
关键创新:RA-Nav的关键创新在于将语义分割技术与风险评估相结合,从而实现了对环境潜在风险的感知和预测。与传统的仅考虑几何信息的导航系统相比,RA-Nav能够更好地应对环境变化,提高导航的安全性。此外,针对不同类型的障碍物设计不同的风险评估函数也是一个创新点。
关键设计:语义分割网络采用轻量级设计,以保证实时性。风险评估函数的设计需要考虑障碍物的类型、速度、距离等因素。路径规划算法需要平衡路径的效率和安全性,例如可以使用A*算法,并引入风险代价。轨迹优化可以使用凸优化方法,确保轨迹的平滑性和动态可行性。具体的参数设置和网络结构在论文中应该有详细描述,此处未知。
🖼️ 关键图片
📊 实验亮点
RA-Nav在模拟实验中表现出优异的性能,尤其是在障碍物状态突然改变的场景中,其导航成功率明显高于其他基线方法。具体的数据提升幅度未知,但摘要中明确指出RA-Nav在突变场景中优于基线方法,并且在真实世界数据模拟中验证了其有效性。
🎯 应用场景
RA-Nav可应用于各种需要空中机器人自主导航的场景,例如物流配送、环境监测、灾害救援和农业巡检等。通过提高空中机器人在复杂和动态环境中的导航安全性,RA-Nav能够降低事故风险,提高任务效率,并扩展空中机器人的应用范围。
📄 摘要(原文)
Existing aerial robot navigation systems typically plan paths around static and dynamic obstacles, but fail to adapt when a static obstacle suddenly moves. Integrating environmental semantic awareness enables estimation of potential risks posed by suddenly moving obstacles. In this paper, we propose RA- Nav, a risk-aware navigation framework based on semantic segmentation. A lightweight multi-scale semantic segmentation network identifies obstacle categories in real time. These obstacles are further classified into three types: stationary, temporarily static, and dynamic. For each type, corresponding risk estimation functions are designed to enable real-time risk prediction, based on which a complete local risk map is constructed. Based on this map, the risk-informed path search algorithm is designed to guarantee planning that balances path efficiency and safety. Trajectory optimization is then applied to generate trajectories that are safe, smooth, and dynamically feasible. Comparative simulations demonstrate that RA-Nav achieves higher success rates than baselines in sudden obstacle state transition scenarios. Its effectiveness is further validated in simulations using real- world data.