Benchmarking the Effects of Object Pose Estimation and Reconstruction on Robotic Grasping Success
作者: Varun Burde, Pavel Burget, Torsten Sattler
分类: cs.RO, cs.CV
发布日期: 2026-02-19
💡 一句话要点
提出基于物理仿真的机器人抓取基准,评估6D位姿估计和三维重建对抓取成功率的影响
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 三维重建 6D位姿估计 物理仿真 基准测试 机器人操作 感知系统
📋 核心要点
- 现有三维重建评估方法缺乏与下游机器人操作任务(如抓取)的直接关联,难以评估重建质量对实际操作性能的影响。
- 论文提出一个基于物理仿真的大规模基准,通过模拟抓取过程,评估6D位姿估计和三维重建质量对机器人抓取成功率的综合影响。
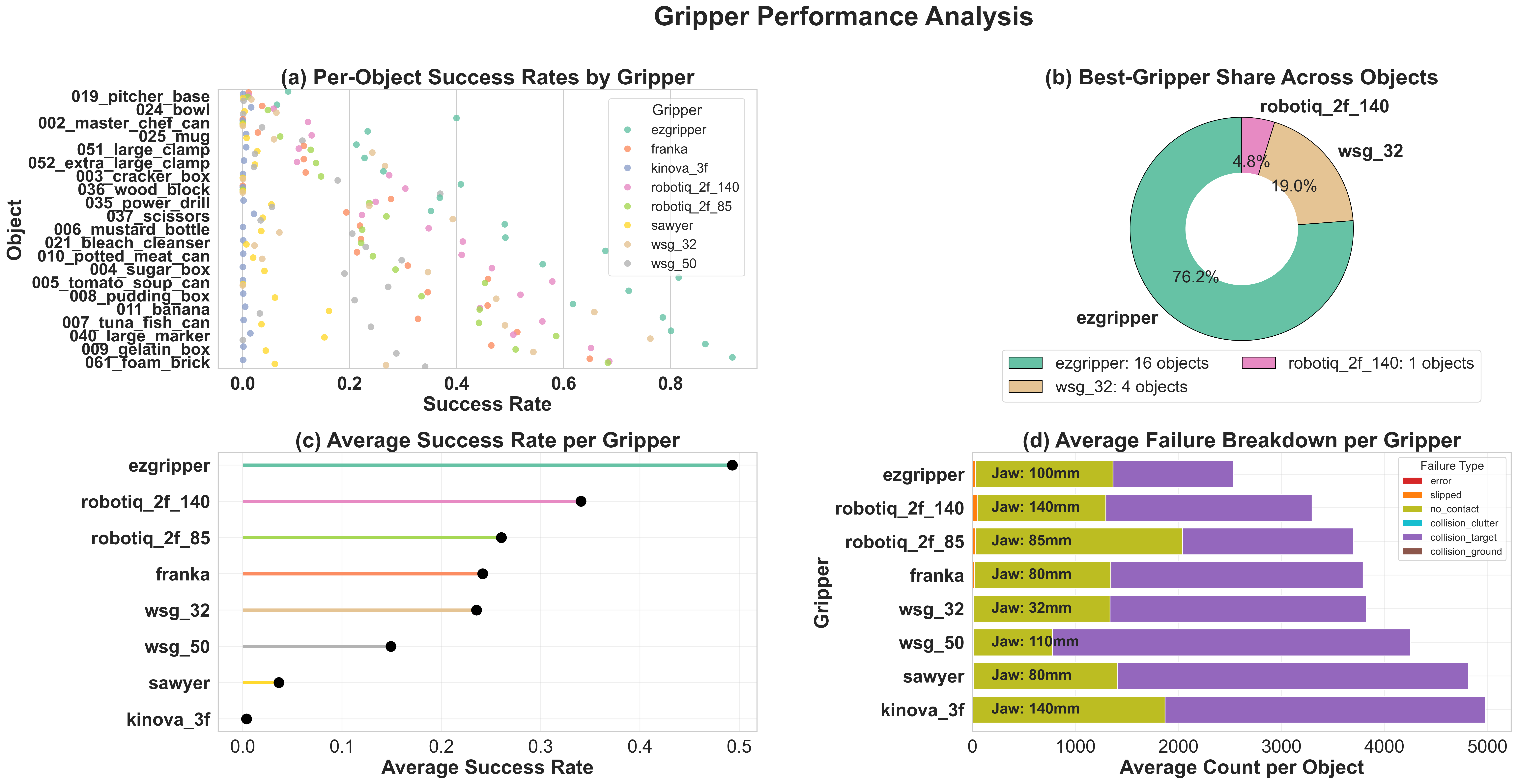
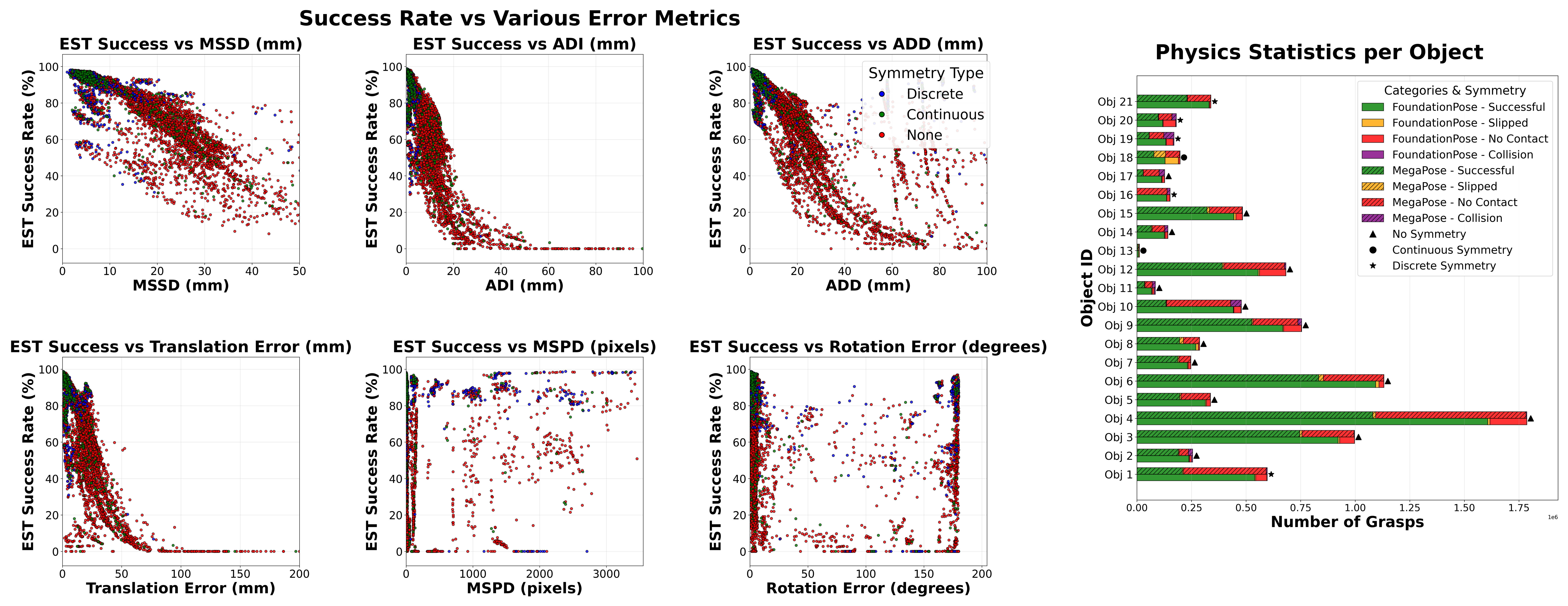
- 实验结果表明,重建伪影会减少抓取姿态候选数量,但对准确位姿下的抓取性能影响不大,且空间误差是影响抓取成功率的关键因素。
📝 摘要(中文)
三维重建是许多机器人感知任务的基础,包括6D物体位姿估计和抓取姿态生成。现代三维重建方法可以从多视角图像生成视觉和几何上令人印象深刻的网格模型,但标准的几何评估并不能反映重建质量如何影响下游任务,如机器人操作性能。本文通过引入一个大规模的、基于物理的基准来解决这个问题,该基准评估了6D位姿估计器和3D网格模型在抓取中的功能有效性。我们通过在各种重建的3D网格上生成抓取姿态,并在真实模型上执行它们来分析模型保真度的影响,模拟使用不完善的模型生成的抓取姿态如何影响与真实物体的交互。这评估了位姿误差、抓取鲁棒性和三维重建的几何不准确性的综合影响。结果表明,重建伪影显著减少了抓取姿态候选的数量,但对于准确估计的位姿,对抓取性能的影响可以忽略不计。我们的结果还表明,抓取成功率和位姿误差之间的关系主要受空间误差的影响,即使是简单的平移误差也能提供对对称物体抓取姿态成功率的洞察。这项工作提供了关于感知系统如何与使用机器人的物体操作相关的见解。
🔬 方法详解
问题定义:现有三维重建方法的评估指标主要关注几何精度,缺乏与下游机器人操作任务(如抓取)的直接联系。因此,即使重建模型在视觉上很逼真,也难以评估其对机器人操作性能的实际影响。现有方法无法有效评估重建质量对抓取成功率的影响,以及位姿估计误差和重建几何误差的综合作用。
核心思路:论文的核心思路是通过构建一个基于物理仿真的基准,模拟机器人抓取过程,将三维重建和6D位姿估计的质量与实际的抓取成功率联系起来。通过在重建模型上生成抓取姿态,并在真实模型上执行抓取,可以评估重建误差和位姿误差对抓取性能的综合影响。这种方法能够更真实地反映重建质量对机器人操作的价值。
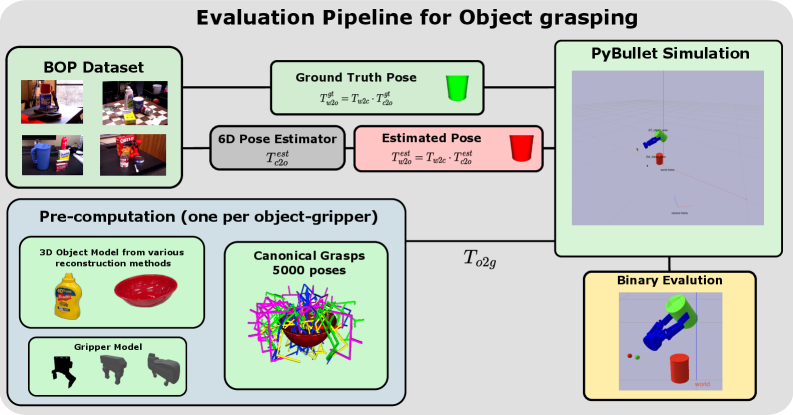
技术框架:该基准测试框架包含以下主要步骤:1) 使用不同的三维重建方法生成物体的三维网格模型。2) 使用6D位姿估计器估计物体在场景中的位姿。3) 在重建的网格模型上生成候选抓取姿态。4) 在物理仿真环境中,使用真实物体的三维模型,执行生成的抓取姿态。5) 评估抓取是否成功,并分析抓取成功率与重建质量和位姿估计误差之间的关系。
关键创新:该论文的关键创新在于构建了一个大规模的、基于物理仿真的机器人抓取基准。该基准能够直接评估三维重建和6D位姿估计对机器人抓取成功率的影响,弥补了现有评估方法的不足。通过模拟真实世界的抓取过程,该基准能够更准确地反映重建质量对机器人操作的价值。
关键设计:该基准的关键设计包括:1) 使用多种三维重建方法生成不同质量的网格模型,以便评估重建质量的影响。2) 使用物理仿真引擎模拟抓取过程,考虑了物体的物理属性和机器人运动学。3) 设计了评估指标,用于量化抓取成功率和位姿估计误差之间的关系。4) 考虑了对称物体,并分析了平移误差对抓取成功率的影响。
🖼️ 关键图片
📊 实验亮点
实验结果表明,重建伪影显著减少了抓取姿态候选的数量,但对于准确估计的位姿,对抓取性能的影响可以忽略不计。研究还发现,抓取成功率和位姿误差之间的关系主要受空间误差的影响,即使是简单的平移误差也能提供对对称物体抓取姿态成功率的洞察。这些发现为改进机器人感知和操作系统提供了重要的指导。
🎯 应用场景
该研究成果可应用于机器人操作、自动化装配、物流分拣等领域。通过该基准,可以更好地评估和选择适用于特定任务的三维重建和位姿估计方法,提高机器人操作的效率和可靠性。此外,该基准还可以用于训练和优化机器人抓取策略,提高机器人的自主操作能力。
📄 摘要(原文)
3D reconstruction serves as the foundational layer for numerous robotic perception tasks, including 6D object pose estimation and grasp pose generation. Modern 3D reconstruction methods for objects can produce visually and geometrically impressive meshes from multi-view images, yet standard geometric evaluations do not reflect how reconstruction quality influences downstream tasks such as robotic manipulation performance. This paper addresses this gap by introducing a large-scale, physics-based benchmark that evaluates 6D pose estimators and 3D mesh models based on their functional efficacy in grasping. We analyze the impact of model fidelity by generating grasps on various reconstructed 3D meshes and executing them on the ground-truth model, simulating how grasp poses generated with an imperfect model affect interaction with the real object. This assesses the combined impact of pose error, grasp robustness, and geometric inaccuracies from 3D reconstruction. Our results show that reconstruction artifacts significantly decrease the number of grasp pose candidates but have a negligible effect on grasping performance given an accurately estimated pose. Our results also reveal that the relationship between grasp success and pose error is dominated by spatial error, and even a simple translation error provides insight into the success of the grasping pose of symmetric objects. This work provides insight into how perception systems relate to object manipulation using robots.