Reactive Motion Generation With Particle-Based Perception in Dynamic Environments
作者: Xiyuan Zhao, Huijun Li, Lifeng Zhu, Zhikai Wei, Xianyi Zhu, Aiguo Song
分类: cs.RO
发布日期: 2026-02-18
备注: This paper has 20 pages, 15 figures, and 3 tables
💡 一句话要点
提出基于粒子动态感知的反应式运动生成方法,解决动态环境中机器人操作的避障问题
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱五:交互与反应 (Interaction & Reaction) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 反应式运动规划 动态环境感知 粒子滤波 模型预测控制 机器人操作
📋 核心要点
- 现有方法在动态环境中进行反应式运动规划时,通常依赖于静态感知和系统动力学建模,难以应对动态障碍物。
- 论文提出了一种基于粒子滤波的动态感知方法,显式地维护障碍物的速度和协方差,并结合模型预测控制进行轨迹优化。
- 实验结果表明,该方法在模拟和真实环境中均能有效避开静态和动态障碍物,显著提升了安全性和反应性。
📝 摘要(中文)
本文提出了一种基于模型的反应式运动生成方法,用于解决动态和非结构化环境中机器人操作的挑战。该方法着重于揭示反应式规划和动态映射之间的紧密联系。为了实现高效的、具有动态属性的粒子感知,提出了一种张量化的粒子权重更新方案,显式地维护障碍物的速度和协方差。在此动态表示的基础上,提出了一种基于障碍物感知的MPPI规划公式,该公式联合传播机器人-障碍物动力学,从而可以在不确定性下预测和评估未来的系统运动。模型预测方法显著提高了动态环境中的安全性和反应性。通过在模拟和真实的噪声环境中应用该框架,证明了显式地建模机器人-障碍物动力学能够持续地提升性能,优于基于MPPI的感知-规划基线方法,从而避免多个静态和动态障碍物。
🔬 方法详解
问题定义:在动态和非结构化的环境中,机器人操作面临着反应式运动生成的问题。现有的方法通常依赖于静态的感知信息,难以准确地建模动态障碍物,并且在感知和控制存在不确定性的情况下,难以优化出安全的轨迹。因此,如何在动态环境中实现安全、高效的反应式运动规划是一个关键挑战。
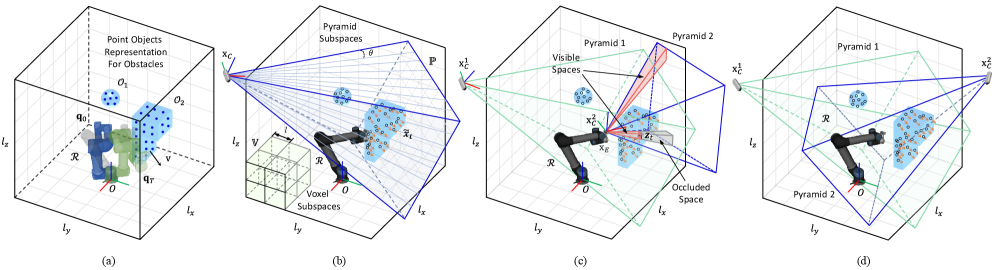
核心思路:论文的核心思路是将反应式规划和动态环境感知紧密结合。通过显式地建模障碍物的动态属性(速度和协方差),并将其融入到运动规划过程中,从而使机器人能够更好地预测和应对动态环境的变化。这种方法的核心在于建立一个能够表达动态信息的环境模型,并利用该模型进行预测和规划。
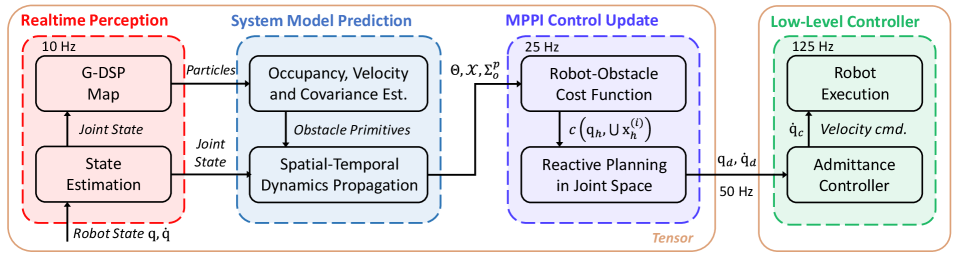
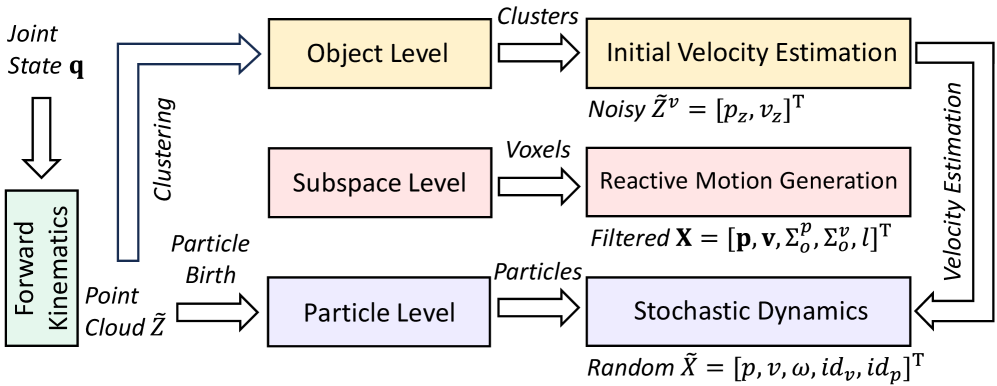
技术框架:该方法主要包含两个核心模块:动态粒子感知和基于障碍物感知的MPPI规划。首先,使用张量化的粒子权重更新方案来维护障碍物的速度和协方差,从而构建动态环境的粒子表示。然后,基于此动态表示,提出了一种基于障碍物感知的MPPI规划公式,该公式联合传播机器人-障碍物动力学,从而可以在不确定性下预测和评估未来的系统运动。整个框架通过迭代感知和规划,实现对动态环境的反应式运动生成。
关键创新:该方法最重要的创新点在于显式地建模了机器人与障碍物之间的动态关系。传统的运动规划方法通常将障碍物视为静态的,而该方法通过维护障碍物的速度和协方差,能够更准确地预测障碍物的未来运动,从而提高规划的安全性。此外,张量化的粒子权重更新方案能够高效地维护动态属性,降低了计算复杂度。
关键设计:在粒子滤波方面,采用了张量化的权重更新方案,以高效地维护障碍物的速度和协方差。在MPPI规划方面,设计了一种障碍物感知的成本函数,该函数考虑了机器人与障碍物之间的距离、速度等因素,从而引导规划器生成安全的轨迹。此外,还对控制输入进行了约束,以保证机器人的运动能力。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在模拟和真实环境中均能有效避开静态和动态障碍物。与基于静态感知的MPPI基线方法相比,该方法在安全性和反应性方面均有显著提升。具体而言,在复杂的动态环境中,该方法能够成功避开多个动态障碍物,并且能够更快地响应环境变化,从而保证机器人的安全运行。
🎯 应用场景
该研究成果可应用于各种需要在动态环境中进行操作的机器人系统,例如自动驾驶、物流机器人、服务机器人等。通过提高机器人在动态环境中的安全性和反应性,可以使其更好地适应复杂和不确定的场景,从而提高工作效率和安全性。未来,该方法可以进一步扩展到多机器人协作、人机协作等领域。
📄 摘要(原文)
Reactive motion generation in dynamic and unstructured scenarios is typically subject to essentially static perception and system dynamics. Reliably modeling dynamic obstacles and optimizing collision-free trajectories under perceptive and control uncertainty are challenging. This article focuses on revealing tight connection between reactive planning and dynamic mapping for manipulators from a model-based perspective. To enable efficient particle-based perception with expressively dynamic property, we present a tensorized particle weight update scheme that explicitly maintains obstacle velocities and covariance meanwhile. Building upon this dynamic representation, we propose an obstacle-aware MPPI-based planning formulation that jointly propagates robot-obstacle dynamics, allowing future system motion to be predicted and evaluated under uncertainty. The model predictive method is shown to significantly improve safety and reactivity with dynamic surroundings. By applying our complete framework in simulated and noisy real-world environments, we demonstrate that explicit modeling of robot-obstacle dynamics consistently enhances performance over state-of-the-art MPPI-based perception-planning baselines avoiding multiple static and dynamic obstacles.