Dynamic Modeling and MPC for Locomotion of Tendon-Driven Soft Quadruped
作者: Saumya Karan, Neerav Maram, Suraj Borate, Madhu Vadali
分类: cs.RO
发布日期: 2026-02-18
💡 一句话要点
提出基于Cosserat杆理论和MPC的肌腱驱动软体四足机器人运动控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 四足机器人 运动控制 模型预测控制 Cosserat杆理论
📋 核心要点
- 现有软体机器人运动控制方法难以兼顾物理保真度和计算效率,限制了其在复杂环境中的应用。
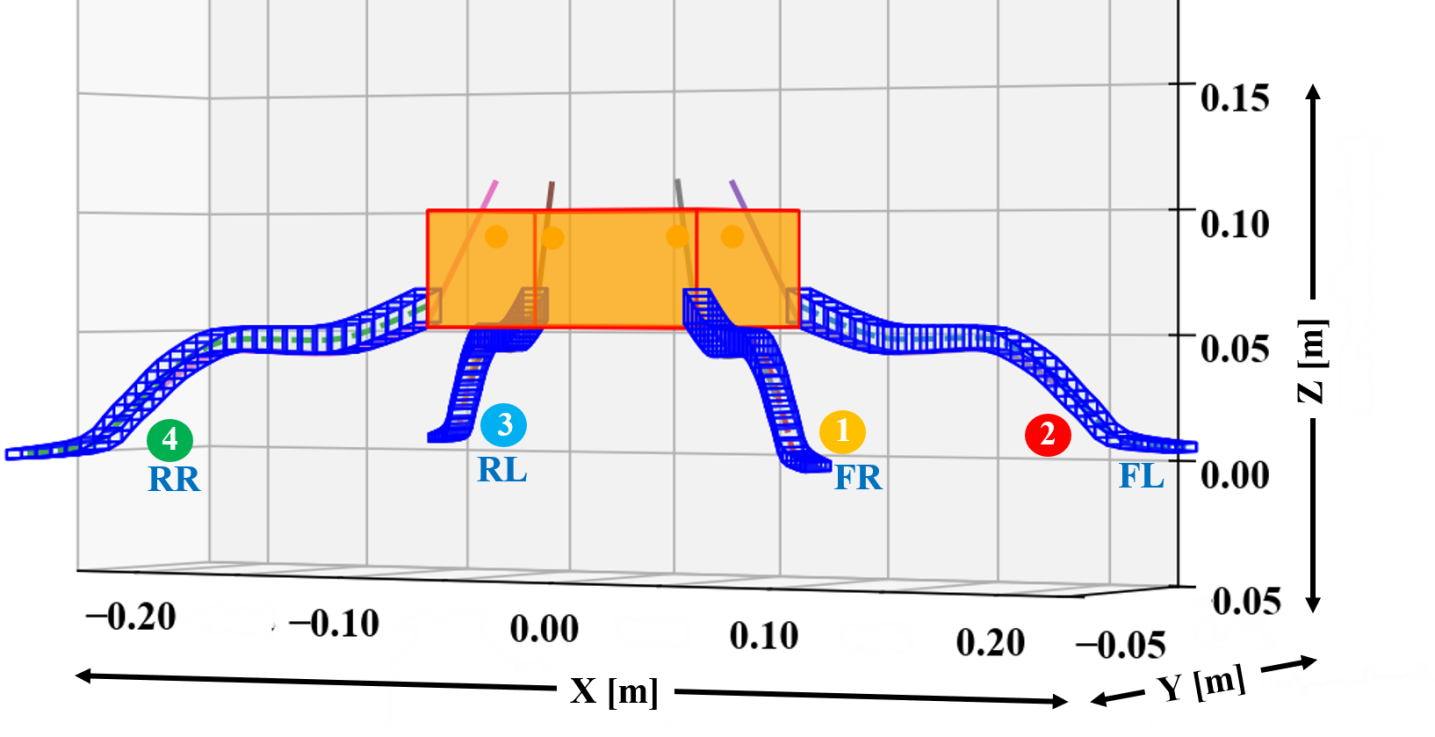
- 论文提出一种模块化建模框架,将柔顺腿部动力学通过反作用力与刚性躯干连接,实现高效的全身仿真和控制。
- 实验结果表明,该方法在爬行和行走步态下均能实现高精度控制,质心轨迹误差小于5mm。
📝 摘要(中文)
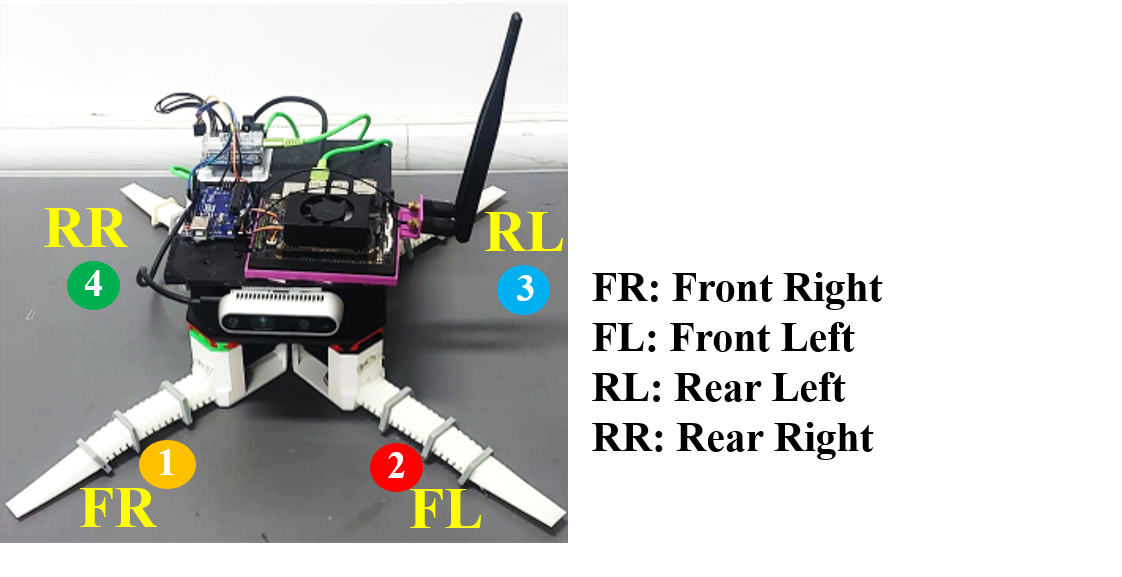
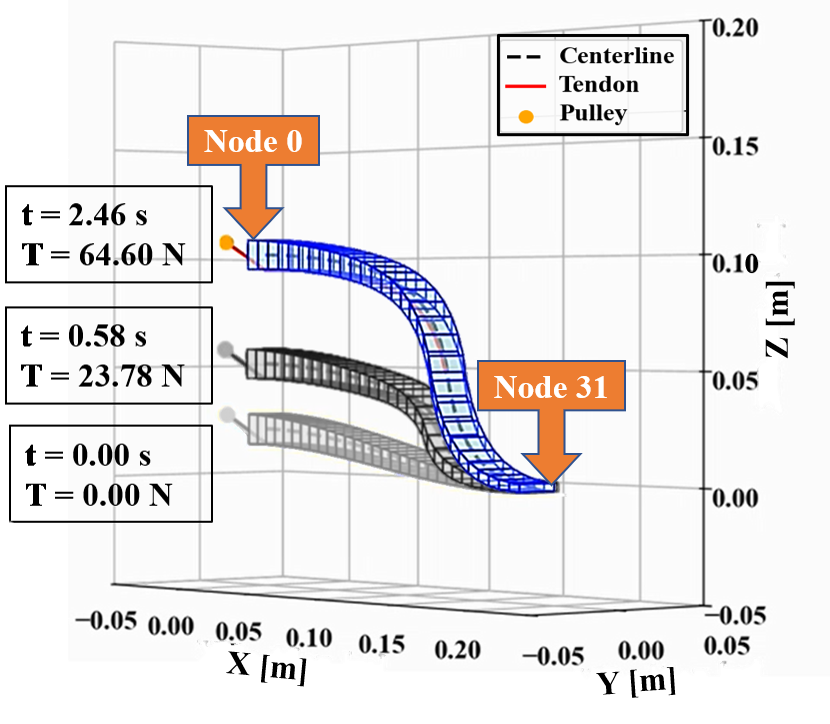
本文提出了一种肌腱驱动的软体四足机器人SLOT,该机器人采用3D打印的TPU腿部,旨在研究基于物理信息的建模和控制方法,仅使用四个执行器实现柔顺的腿部运动。每条腿都被建模为可变形连续体,采用离散Cosserat杆理论,能够捕捉大的弯曲变形、分布式弹性、肌腱驱动和地面接触相互作用。引入了一个模块化的全身建模框架,其中柔顺腿部的动力学通过施加到刚性躯干上的物理一致的反作用力来表示,从而在连续软肢和刚体运动动力学之间提供可扩展的接口。这种公式允许高效的全身仿真和实时控制,而不会牺牲物理保真度。所提出的模型被嵌入到凸模型预测控制框架中,该框架优化了0.495秒预测范围内的地面反作用力,并通过基于物理信息的作用力-角度关系将其映射到肌腱驱动。由此产生的控制器在各种扰动下实现了渐近稳定性。该框架在爬行和行走步态期间在物理原型上进行了实验验证,在质心轨迹中实现了小于5毫米RMSE的高精度。这些结果证明了一种将连续软腿集成到基于模型的运动控制中的通用方法,从而推进了软体四足机器人的可扩展和可重用的建模和控制方法。
🔬 方法详解
问题定义:现有软体四足机器人的运动控制方法通常难以在物理保真度和计算效率之间取得平衡。高精度的有限元模型计算量巨大,难以用于实时控制;而简化的模型则可能无法准确捕捉软体结构的复杂变形和力学特性,导致控制性能下降。因此,如何在保证物理保真度的前提下,实现软体四足机器人的高效建模和控制是一个关键问题。
核心思路:论文的核心思路是将软体腿部的复杂动力学解耦为腿部与躯干之间的反作用力,从而将整个机器人的建模问题分解为软体腿部的建模和刚体躯干的建模两部分。软体腿部采用基于Cosserat杆理论的连续体模型,能够准确捕捉其变形和力学特性;刚体躯干则采用传统的刚体动力学模型。通过这种解耦,可以在保证物理保真度的前提下,显著降低计算复杂度。
技术框架:该方法的技术框架主要包括以下几个模块:1) 基于离散Cosserat杆理论的软体腿部建模;2) 刚性躯干的动力学建模;3) 模块化的全身建模框架,通过反作用力连接软体腿部和刚性躯干;4) 基于凸模型预测控制(MPC)的运动控制器,优化地面反作用力并映射到肌腱驱动。整体流程为:首先,建立软体腿部和刚性躯干的动力学模型;然后,利用模块化框架将两者连接起来,形成完整的机器人模型;最后,利用MPC控制器优化机器人的运动轨迹,并通过肌腱驱动实现期望的运动。
关键创新:该方法最重要的技术创新点在于其模块化的全身建模框架。该框架通过将软体腿部的复杂动力学解耦为腿部与躯干之间的反作用力,实现了软体结构和刚体结构的有效集成。与传统的整体建模方法相比,该框架具有更高的计算效率和可扩展性,能够方便地应用于不同结构的软体机器人。
关键设计:在软体腿部建模中,采用了离散Cosserat杆理论,将连续的杆件离散为多个段,并考虑了弯曲、扭转和伸缩等变形模式。在MPC控制器设计中,采用了凸优化方法,保证了控制器的实时性和稳定性。同时,利用基于物理信息的作用力-角度关系,将地面反作用力映射到肌腱驱动,实现了对软体腿部的精确控制。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在爬行和行走步态下均能实现高精度控制,质心轨迹的均方根误差(RMSE)小于5毫米。此外,该控制器在各种扰动下实现了渐近稳定性,验证了其鲁棒性。这些结果表明,该方法能够有效地控制软体四足机器人的运动,并具有良好的实际应用价值。
🎯 应用场景
该研究成果可应用于复杂地形下的搜索救援、灾后重建、以及农业采摘等领域。软体机器人具有良好的环境适应性和抗冲击能力,能够在恶劣环境下执行任务。此外,该方法为软体机器人的建模和控制提供了一种通用的解决方案,有助于推动软体机器人在更多领域的应用。
📄 摘要(原文)
SLOT (Soft Legged Omnidirectional Tetrapod), a tendon-driven soft quadruped robot with 3D-printed TPU legs, is presented to study physics-informed modeling and control of compliant legged locomotion using only four actuators. Each leg is modeled as a deformable continuum using discrete Cosserat rod theory, enabling the capture of large bending deformations, distributed elasticity, tendon actuation, and ground contact interactions. A modular whole-body modeling framework is introduced, in which compliant leg dynamics are represented through physically consistent reaction forces applied to a rigid torso, providing a scalable interface between continuum soft limbs and rigid-body locomotion dynamics. This formulation allows efficient whole-body simulation and real-time control without sacrificing physical fidelity. The proposed model is embedded into a convex model predictive control framework that optimizes ground reaction forces over a 0.495 s prediction horizon and maps them to tendon actuation through a physics-informed force-angle relationship. The resulting controller achieves asymptotic stability under diverse perturbations. The framework is experimentally validated on a physical prototype during crawling and walking gaits, achieving high accuracy with less than 5 mm RMSE in center of mass trajectories. These results demonstrate a generalizable approach for integrating continuum soft legs into model-based locomotion control, advancing scalable and reusable modeling and control methods for soft quadruped robots.