Nonplanar Model Predictive Control for Autonomous Vehicles with Recursive Sparse Gaussian Process Dynamics
作者: Ahmad Amine, Kabir Puri, Viet-Anh Le, Rahul Mangharam
分类: cs.RO, eess.SY
发布日期: 2026-02-18
备注: 6 pages, 5 figures. Accepted to IEEE Intelligent Vehicles Symposium (IV), 2026
💡 一句话要点
提出基于递归稀疏高斯过程动态的非平面模型预测控制,用于自主车辆在复杂地形导航。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非平面地形 模型预测控制 高斯过程 自主车辆 机器人 动力学建模 递归稀疏
📋 核心要点
- 传统自主车辆控制方法难以应对复杂非平面地形,车辆动力学建模面临挑战。
- 论文提出一种几何感知建模方法,学习残差高斯过程,并利用递归稀疏GP实现实时地形适应。
- 实验结果表明,该框架在复杂3D表面上能保持高跟踪精度,验证了其有效性。
📝 摘要(中文)
本文提出了一种用于在非平面地形上运行的自主车辆的非平面模型预测控制(MPC)框架。为了逼近此类环境中复杂的车辆动力学,我们开发了一种几何感知建模方法,该方法学习残差高斯过程(GP)。通过利用递归稀疏GP,该框架能够实时适应不同的地形几何形状。通过使用模型预测路径积分(MPPI)控制器,在参考跟踪任务中验证了学习模型的有效性。在自定义Isaac Sim环境中的验证证实了该框架在具有挑战性的3D表面上保持高跟踪精度的能力。
🔬 方法详解
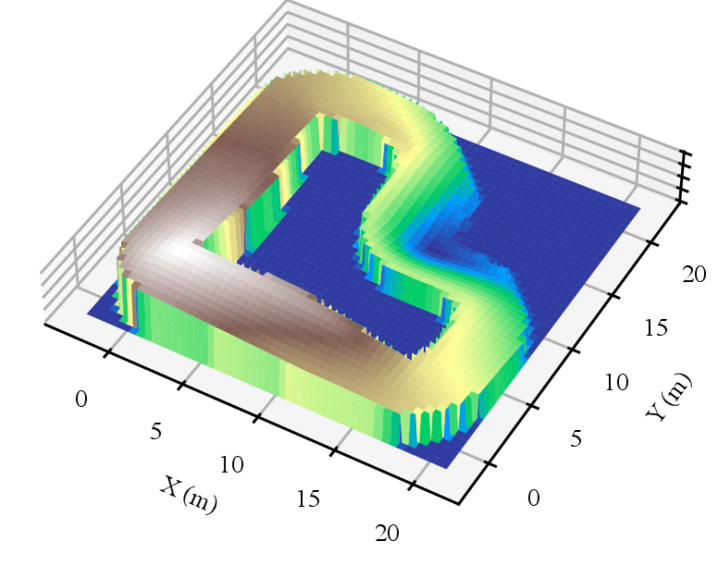
问题定义:自主车辆在非平面地形上的运动控制是一个复杂的问题。传统的模型预测控制方法通常依赖于简化的车辆动力学模型,难以准确描述车辆在复杂地形上的行为。此外,地形几何形状的变化也会影响车辆的动力学特性,使得控制器的设计更具挑战性。现有方法难以实时适应变化的地形,导致控制性能下降。
核心思路:本文的核心思路是利用高斯过程(GP)来学习车辆的残差动力学模型,从而更准确地描述车辆在非平面地形上的运动。通过引入几何感知建模,模型能够感知地形的几何信息,并将其融入到动力学模型的学习中。此外,采用递归稀疏GP能够实现模型的实时更新和适应,从而应对变化的地形。
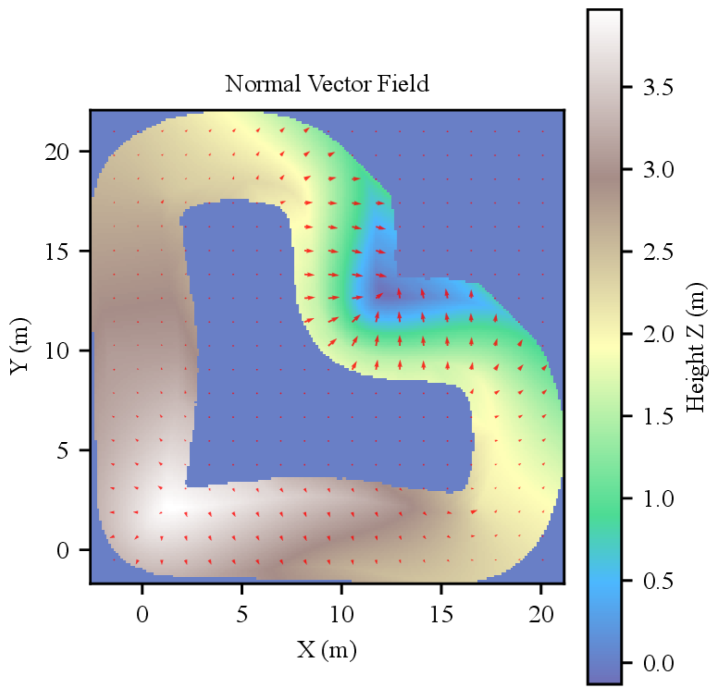
技术框架:该框架主要包含以下几个模块:1) 几何感知建模:利用传感器数据获取地形的几何信息,并将其作为输入特征。2) 残差高斯过程学习:学习车辆的残差动力学模型,即实际动力学与简化模型之间的差异。3) 递归稀疏GP:采用递归稀疏GP实现模型的实时更新和适应。4) 模型预测控制:利用学习到的动力学模型,设计模型预测路径积分(MPPI)控制器,实现车辆的自主导航。
关键创新:该论文的关键创新在于将几何感知建模与递归稀疏GP相结合,用于学习车辆在非平面地形上的动力学模型。与传统的基于物理模型的控制方法相比,该方法能够更准确地描述车辆的运动,并实现实时地形适应。与传统的GP方法相比,递归稀疏GP能够降低计算复杂度,实现实时控制。
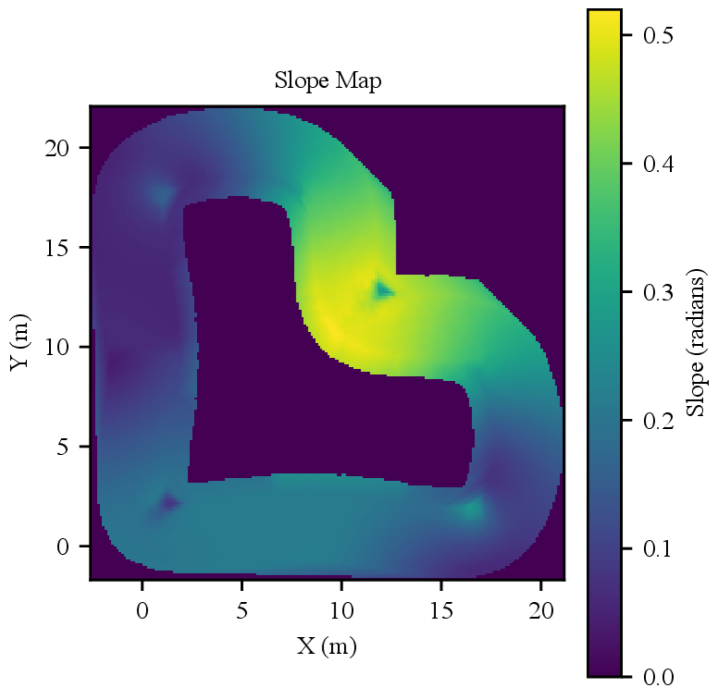
关键设计:在几何感知建模中,需要选择合适的几何特征,例如地形的高度、坡度、曲率等。在残差高斯过程学习中,需要选择合适的核函数和超参数。在递归稀疏GP中,需要选择合适的稀疏化方法和更新策略。在模型预测控制中,需要设计合适的代价函数和约束条件。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该框架在自定义Isaac Sim环境中能够保持高跟踪精度。具体而言,在具有挑战性的3D表面上,该框架能够实现较低的跟踪误差,验证了其有效性。与传统的基于物理模型的控制方法相比,该框架能够显著提高车辆的导航性能。
🎯 应用场景
该研究成果可应用于各种需要在复杂地形上运行的自主车辆,例如火星探测车、农业机器人、矿业车辆等。通过提高自主车辆在复杂地形上的导航能力,可以降低人工干预的需求,提高工作效率,并降低安全风险。此外,该研究成果还可以推广到其他类型的机器人,例如无人机、水下机器人等。
📄 摘要(原文)
This paper proposes a nonplanar model predictive control (MPC) framework for autonomous vehicles operating on nonplanar terrain. To approximate complex vehicle dynamics in such environments, we develop a geometry-aware modeling approach that learns a residual Gaussian Process (GP). By utilizing a recursive sparse GP, the framework enables real-time adaptation to varying terrain geometry. The effectiveness of the learned model is demonstrated in a reference-tracking task using a Model Predictive Path Integral (MPPI) controller. Validation within a custom Isaac Sim environment confirms the framework's capability to maintain high tracking accuracy on challenging 3D surfaces.