Reactive Slip Control in Multifingered Grasping: Hybrid Tactile Sensing and Internal-Force Optimization
作者: Théo Ayral, Saifeddine Aloui, Mathieu Grossard
分类: cs.RO, eess.SY
发布日期: 2026-02-18
备注: Accepted to IEEE International Conference on Robotics and Automation (ICRA), 2026
💡 一句话要点
提出一种混合触觉传感与内力优化的多指抓取滑移反应控制方法
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多指抓取 滑移控制 触觉传感 内力优化 二次规划
📋 核心要点
- 现有方法在多指抓取中难以快速、鲁棒地应对滑移,尤其是在外部扰动下。
- 该方法融合压电和压阻触觉传感,结合二次规划优化内力,实现快速滑移检测和响应。
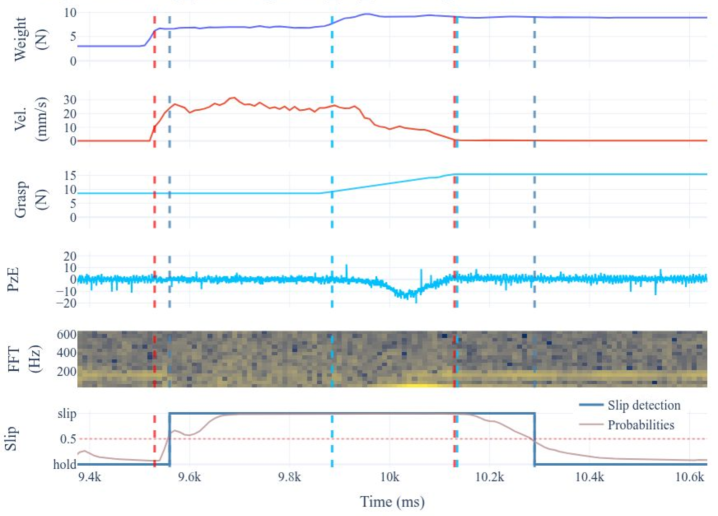
- 实验表明,该方法能有效稳定多指抓取,滑移检测时间为20ms,理论控制延迟低于50ms。
📝 摘要(中文)
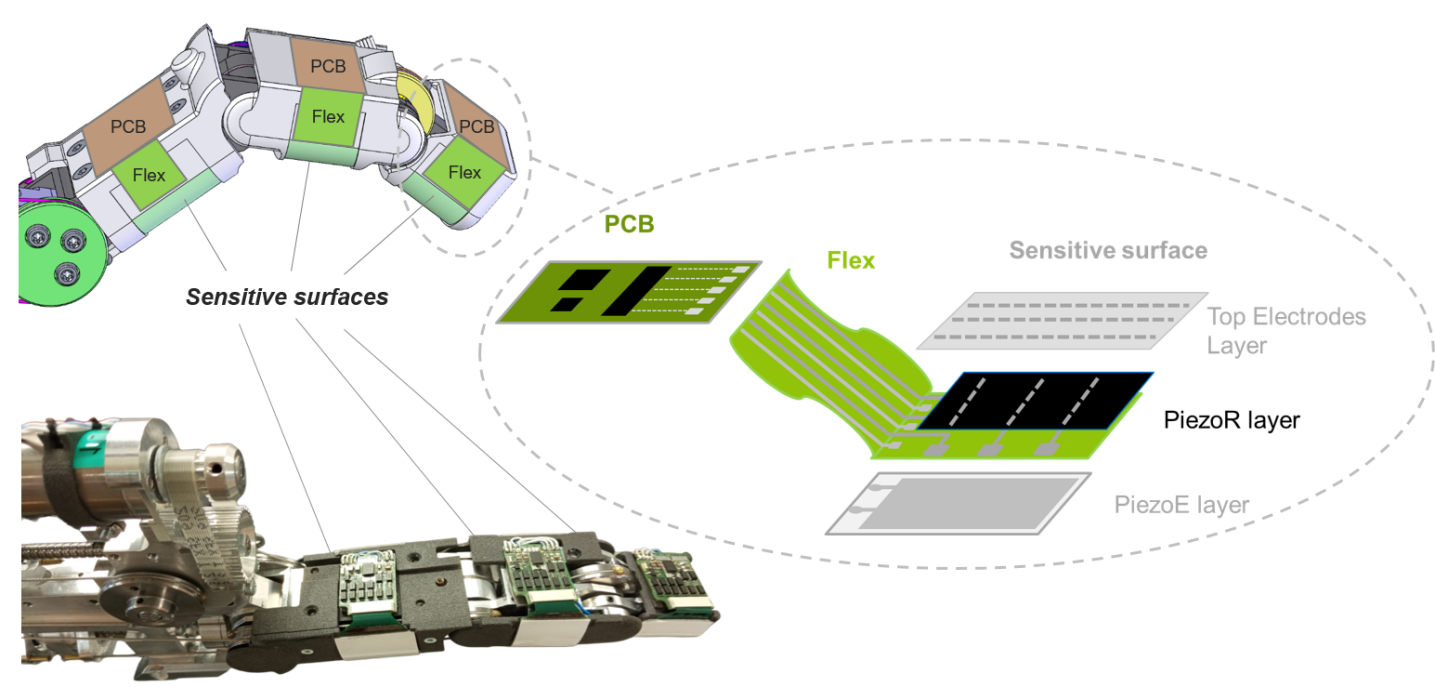
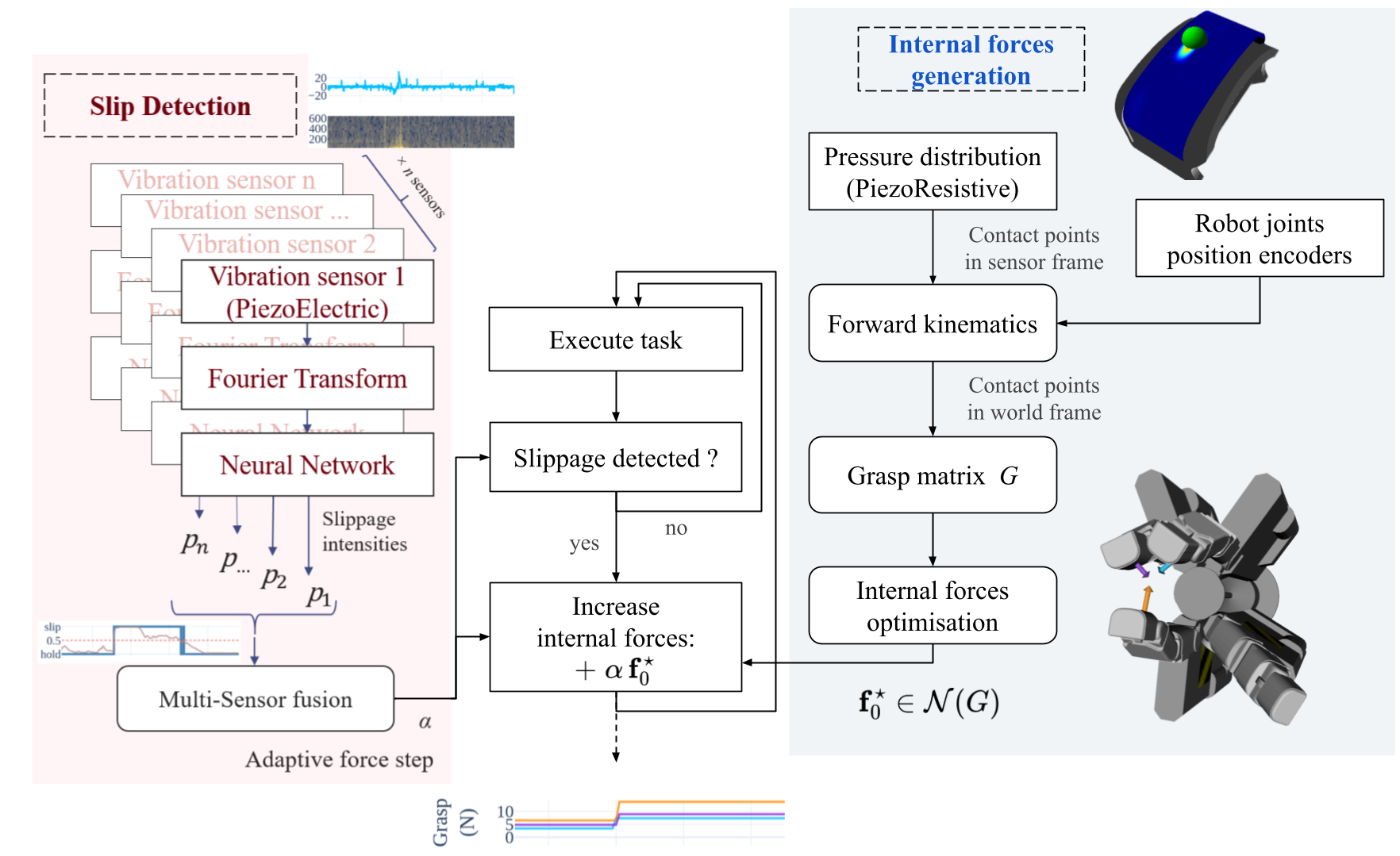
本文提出了一种混合学习和基于模型的方法,该方法通过调整多指机械手的内部抓取力来阻止手中物体的滑移。一个多模态触觉传感器堆栈结合了用于快速滑移提示的压电(PzE)传感和用于接触定位的压阻(PzR)阵列,从而能够在线构建抓取矩阵。一旦发生滑移,我们通过一个二次规划来更新抓取零空间中的内力,该二次规划在保持物体wrench的同时强制执行驱动限制。该流程在理论上实现了35-40毫秒的传感到命令的延迟,其中基于PzR的接触和几何更新需要5毫秒,二次规划求解需要约4毫秒。在受控试验中,滑移的发生可以在20毫秒内检测到。我们展示了在外部扰动下多指抓取的闭环稳定。通过学习到的触觉提示增强高效的解析力控制,可以实现鲁棒性和快速反应,这在我们的端到端评估中得到了证实。测量的延迟主要由实验数据路径决定,而不是实际计算。该分析概述了一条实现亚50毫秒闭环稳定控制的清晰途径。
🔬 方法详解
问题定义:多指机械手抓取物体时,由于外部扰动或抓取力不足,容易发生滑移,导致抓取失败。现有方法通常依赖视觉反馈或复杂的模型预测,难以实现快速、鲁棒的滑移控制。痛点在于滑移检测延迟高,内力调整速度慢,无法有效抑制滑移。
核心思路:论文的核心思路是融合快速触觉传感和内力优化,实现对滑移的快速反应控制。通过压电传感器快速检测滑移,压阻传感器定位接触点,并利用二次规划在抓取零空间内优化内力,从而在不影响物体整体受力的情况下,调整手指间的力分配,抑制滑移。
技术框架:整体框架包含以下几个主要模块:1) 多模态触觉传感器:压电传感器用于快速滑移检测,压阻传感器用于接触位置估计。2) 抓取矩阵构建:根据触觉传感器数据在线构建抓取矩阵。3) 内力优化:通过二次规划在抓取零空间内优化内力,同时考虑驱动限制。4) 闭环控制:根据滑移检测结果,实时调整内力,实现闭环稳定控制。
关键创新:最重要的技术创新点在于混合触觉传感和内力优化的结合。传统的触觉传感方法通常只关注接触位置或力的大小,而该方法同时利用压电传感器的快速响应和压阻传感器的位置信息,实现了对滑移的快速、准确检测。同时,通过在抓取零空间内优化内力,避免了对物体整体受力的影响,保证了抓取的稳定性。
关键设计:关键设计包括:1) 压电传感器的阈值设置,用于快速滑移检测。2) 压阻传感器阵列的排布,用于准确估计接触位置。3) 二次规划的目标函数和约束条件,目标是最小化内力变化,约束条件包括驱动限制和保持物体wrench不变。4) 实验数据路径的设计,尽量减少数据传输延迟。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法能够在20ms内检测到滑移,理论上可以实现低于50ms的闭环稳定控制。通过与传统方法对比,该方法在抑制滑移、提高抓取鲁棒性方面表现出显著优势。实验中测量的延迟主要由实验数据路径决定,而非实际计算,表明该方法具有进一步优化的潜力。
🎯 应用场景
该研究成果可应用于各种需要高精度、高稳定性的多指机械手抓取任务,例如:精密装配、医疗手术、复杂环境下的物体操作等。通过快速响应滑移,提高抓取成功率和鲁棒性,降低操作风险。未来可进一步扩展到更复杂的物体和环境,实现更智能化的抓取控制。
📄 摘要(原文)
We present a hybrid learning and model-based approach that adapts internal grasp forces to halt in-hand slip on a multifingered robotic gripper. A multimodal tactile stack combines piezoelectric (PzE) sensing for fast slip cues with piezoresistive (PzR) arrays for contact localization, enabling online construction of the grasp matrix. Upon slip, we update internal forces computed in the null space of the grasp via a quadratic program that preserves the object wrench while enforcing actuation limits. The pipeline yields a theoretical sensing-to-command latency of 35-40 ms, with 5 ms for PzR-based contact and geometry updates and about 4 ms for the quadratic program solve. In controlled trials, slip onset is detected at 20ms. We demonstrate closed-loop stabilization on multifingered grasps under external perturbations. Augmenting efficient analytic force control with learned tactile cues yields both robustness and rapid reactions, as confirmed in our end-to-end evaluation. Measured delays are dominated by the experimental data path rather than actual computation. The analysis outlines a clear route to sub-50 ms closed-loop stabilization.