Robot-Assisted Social Dining as a White Glove Service
作者: Atharva S Kashyap, Ugne Aleksandra Morkute, Patricia Alves-Oliveira
分类: cs.RO, cs.AI, cs.HC
发布日期: 2026-02-17
备注: 20 pages, 9 figures. Proceedings of the 2026 CHI Conference on Human Factors in Computing Systems (CHI '26)
💡 一句话要点
提出白手套服务原则,设计餐厅场景下辅助用餐机器人系统
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人辅助用餐 社交机器人 人机交互 参与式设计 白手套服务
📋 核心要点
- 现有机器人辅助用餐系统主要在受控环境测试,缺乏对真实餐厅等社交环境的适应性。
- 论文提出“白手套服务”原则,指导机器人辅助用餐系统的设计,强调用户优先、社交适应和功能扩展。
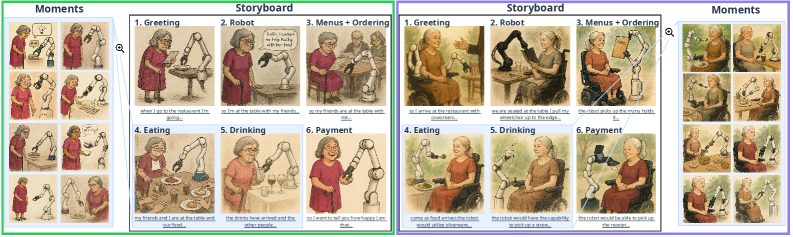
- 通过参与式设计、访谈和AI辅助故事板,探索了残疾人士在餐厅场景下的理想用餐体验。
📝 摘要(中文)
本文旨在探索机器人辅助用餐在公共社交环境(如餐厅)中的应用。现有系统主要在实验室或家庭环境中测试,缺乏对动态、无监督餐厅环境的考虑。通过与残疾人士进行推测性参与式设计,结合半结构化访谈和基于AI的视觉故事板工具,揭示了理想的社交用餐场景。研究提出,此类系统应遵循“白手套服务”原则:(1) 支持多模态输入和不引人注目的输出;(2) 具有上下文相关的社交行为并优先考虑用户;(3) 扩展到喂食以外的角色;(4) 适应餐桌上的其他关系。该研究对机器人辅助喂食在公共环境和群体环境中的应用具有重要意义。
🔬 方法详解
问题定义:论文旨在解决现有机器人辅助用餐系统在真实社交环境(如餐厅)中应用不足的问题。现有系统主要在实验室或家庭环境中进行测试,缺乏对动态、无监督的餐厅环境的适应性,无法满足用户在社交用餐场景下的需求。现有方法的痛点在于缺乏对用户社交需求和环境变化的考虑,导致用户体验不佳。
核心思路:论文的核心思路是借鉴“白手套服务”的理念,将机器人设计成一个体贴、周到、不引人注目的助手。通过理解用户的需求和偏好,机器人能够提供个性化的服务,并融入到社交环境中。这种设计思路强调用户优先、社交适应和功能扩展,旨在提升用户在社交用餐场景下的体验。
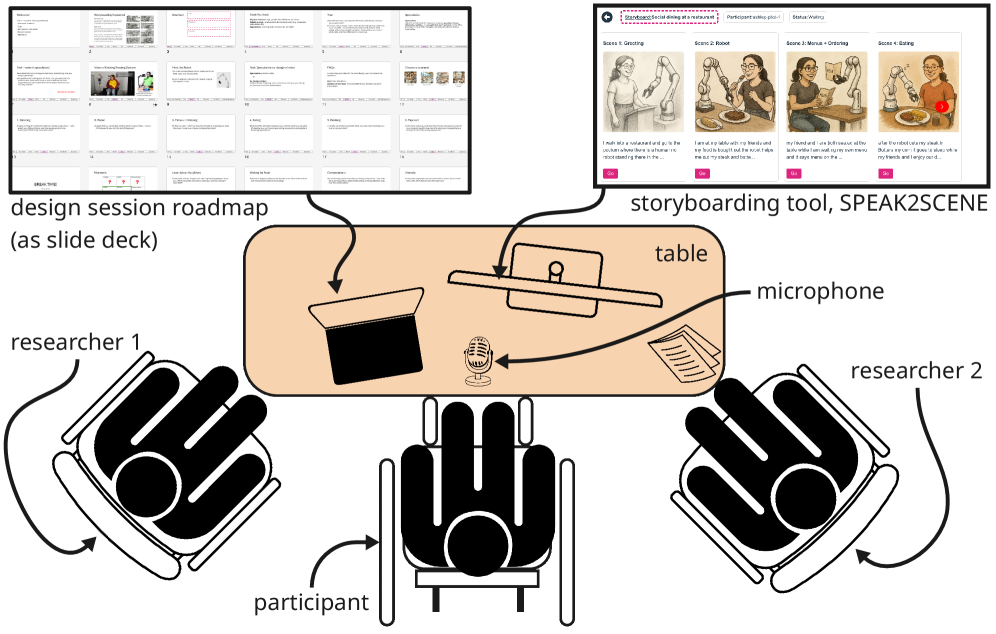
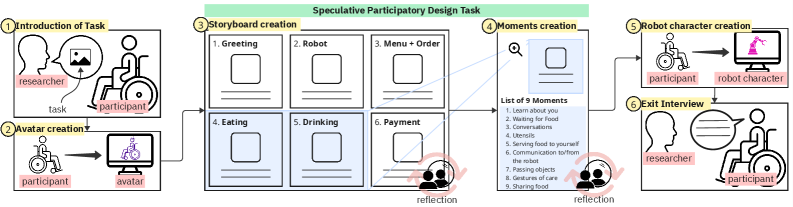
技术框架:论文采用了一种以用户为中心的设计方法,包括以下几个主要阶段:(1) 与残疾人士进行推测性参与式设计,收集用户对理想社交用餐场景的期望;(2) 进行半结构化访谈,深入了解用户的需求和痛点;(3) 开发基于AI的视觉故事板工具,帮助用户可视化和表达他们的想法;(4) 基于收集到的信息,提炼出“白手套服务”原则,并将其应用于机器人系统的设计。
关键创新:论文最重要的技术创新点在于提出了“白手套服务”原则,并将其应用于机器人辅助用餐系统的设计。该原则强调机器人应具备以下特点:(1) 支持多模态输入和不引人注目的输出;(2) 具有上下文相关的社交行为并优先考虑用户;(3) 扩展到喂食以外的角色;(4) 适应餐桌上的其他关系。与现有方法相比,该原则更加注重用户的社交需求和环境适应性。
关键设计:论文侧重于设计原则的提出,并未涉及具体的参数设置、损失函数或网络结构等技术细节。未来的研究可以基于这些原则,进一步开发具体的机器人系统,并针对不同的用户需求和环境特点进行优化。
🖼️ 关键图片
📊 实验亮点
论文通过与残疾人士的深入交流,揭示了他们在餐厅等社交环境下的真实需求和期望。研究提出的“白手套服务”原则为机器人辅助用餐系统的设计提供了新的思路,强调了用户优先、社交适应和功能扩展的重要性。虽然没有提供具体的性能数据,但该研究为未来的研究方向提供了有价值的指导。
🎯 应用场景
该研究成果可应用于开发更智能、更人性化的机器人辅助用餐系统,帮助残疾人士在餐厅等社交环境中享受用餐的乐趣,提升他们的生活质量。此外,该研究提出的“白手套服务”原则也可应用于其他类型的辅助机器人设计,例如医疗护理、家庭服务等,具有广泛的应用前景。
📄 摘要(原文)
Robot-assisted feeding enables people with disabilities who require assistance eating to enjoy a meal independently and with dignity. However, existing systems have only been tested in-lab or in-home, leaving in-the-wild social dining contexts (e.g., restaurants) largely unexplored. Designing a robot for such contexts presents unique challenges, such as dynamic and unsupervised dining environments that a robot needs to account for and respond to. Through speculative participatory design with people with disabilities, supported by semi-structured interviews and a custom AI-based visual storyboarding tool, we uncovered ideal scenarios for in-the-wild social dining. Our key insight suggests that such systems should: embody the principles of a white glove service where the robot (1) supports multimodal inputs and unobtrusive outputs; (2) has contextually sensitive social behavior and prioritizes the user; (3) has expanded roles beyond feeding; (4) adapts to other relationships at the dining table. Our work has implications for in-the-wild and group contexts of robot-assisted feeding.