Spatially-Aware Adaptive Trajectory Optimization with Controller-Guided Feedback for Autonomous Racing
作者: Alexander Wachter, Alexander Willert, Marc-Philip Ecker, Christian Hartl-Nesic
分类: cs.RO
发布日期: 2026-02-17
备注: Accepted at ICRA 2026
💡 一句话要点
提出一种结合空间感知的自适应轨迹优化与控制器引导反馈的自动驾驶赛车框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动驾驶赛车 轨迹优化 空间感知 自适应控制 CMA-ES NURBS 模型预测控制
📋 核心要点
- 现有自动驾驶赛车方法难以有效利用跟踪误差中蕴含的赛道信息,导致轨迹优化受限。
- 该方法利用控制器引导的空间反馈,将跟踪误差转化为赛道局部特征信息,自适应优化轨迹。
- 实验表明,该方法在仿真和真实赛道上均能显著提升赛车性能,并对不同摩擦条件具有鲁棒性。
📝 摘要(中文)
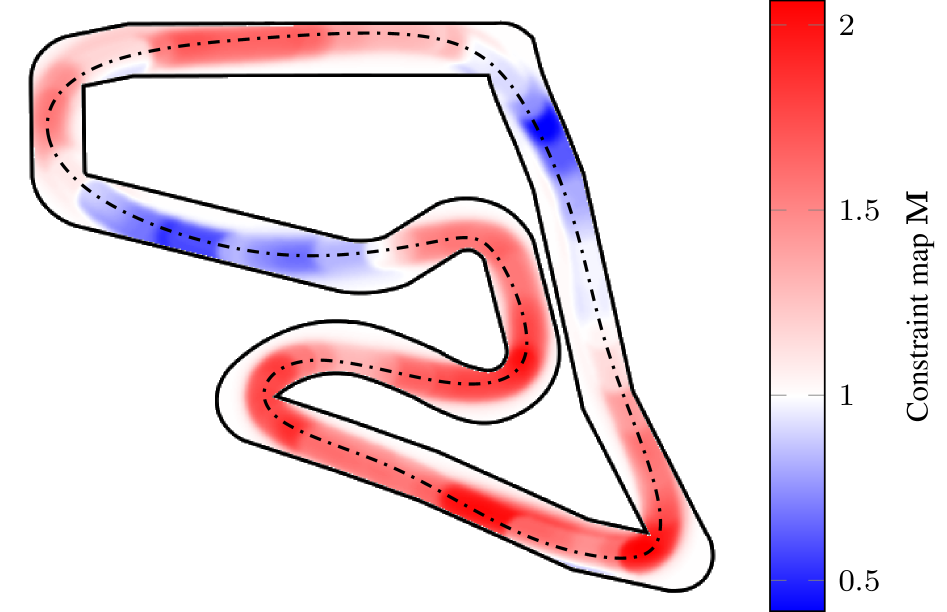
本文提出了一种闭环的自动驾驶赛道优化框架,该框架结合了基于NURBS的轨迹表示、CMA-ES全局轨迹优化和控制器引导的空间反馈。我们的方法没有将跟踪误差视为瞬态扰动,而是通过卡尔曼滤波启发的空间更新,将它们用作局部赛道特征的信息信号。这使得能够构建一个自适应的、基于加速度的约束图,该约束图迭代地优化轨迹,使其在空间变化的赛道和车辆行为下达到接近最优的性能。在仿真中,与使用最大静态加速度参数化的控制器相比,我们的方法实现了17.38%的单圈时间减少。在真实硬件上,使用从高摩擦到低摩擦的不同轮胎配方进行测试,我们获得了7.60%的单圈时间改进,而没有明确地参数化摩擦。这证明了在真实场景中对变化的抓地力条件的鲁棒性。
🔬 方法详解
问题定义:自动驾驶赛车需要在复杂赛道环境下,根据车辆状态和赛道特性,生成最优的行驶轨迹,以尽可能缩短单圈时间。现有方法通常将跟踪误差视为噪声,忽略了其中包含的赛道信息,或者需要预先精确地建模赛道摩擦系数等参数,难以适应真实赛道环境的变化。
核心思路:该论文的核心思路是将跟踪误差视为一种包含赛道局部信息的信号,通过控制器引导的空间反馈,提取这些信息,并用于自适应地调整轨迹优化过程中的约束条件。这种方法能够使轨迹优化器更好地适应赛道的变化,从而生成更优的行驶轨迹。
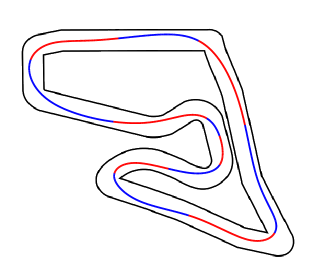
技术框架:该框架包含三个主要模块:1) 基于NURBS的轨迹表示,用于平滑地描述赛道轨迹;2) CMA-ES全局轨迹优化器,用于在全局范围内搜索最优轨迹;3) 控制器引导的空间反馈模块,用于根据跟踪误差更新赛道约束图。整体流程是:首先,CMA-ES生成初始轨迹;然后,车辆根据轨迹行驶,产生跟踪误差;接着,空间反馈模块利用跟踪误差更新约束图;最后,CMA-ES根据更新后的约束图优化轨迹,迭代进行,直至收敛。
关键创新:该论文最重要的技术创新点在于将控制器引导的空间反馈引入到轨迹优化过程中。传统方法通常将跟踪误差视为噪声,而该方法则将其视为一种包含赛道信息的信号,并利用卡尔曼滤波启发的空间更新方法,提取这些信息,用于自适应地调整轨迹优化过程中的约束条件。这种方法能够使轨迹优化器更好地适应赛道的变化,从而生成更优的行驶轨迹。
关键设计:该方法使用基于加速度的约束图来表示赛道约束。约束图根据跟踪误差进行更新,具体来说,如果车辆在某个位置的跟踪误差较大,则该位置的加速度约束会相应地收紧。此外,该方法还使用了CMA-ES算法进行全局轨迹优化,该算法能够有效地搜索高维空间中的最优解。控制器采用模型预测控制(MPC),确保车辆能够精确地跟踪优化后的轨迹。
🖼️ 关键图片

📊 实验亮点
该方法在仿真环境中实现了17.38%的单圈时间减少,优于使用最大静态加速度参数化的控制器。在真实硬件测试中,即使在不同摩擦系数的轮胎条件下,也实现了7.60%的单圈时间改进,无需显式地参数化摩擦系数,展示了良好的鲁棒性。
🎯 应用场景
该研究成果可应用于自动驾驶赛车、无人驾驶车辆以及其他需要在复杂环境中进行轨迹规划的机器人系统。通过自适应地学习环境特征并优化轨迹,可以提高车辆的行驶效率、安全性和鲁棒性,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
We present a closed-loop framework for autonomous raceline optimization that combines NURBS-based trajectory representation, CMA-ES global trajectory optimization, and controller-guided spatial feedback. Instead of treating tracking errors as transient disturbances, our method exploits them as informative signals of local track characteristics via a Kalman-inspired spatial update. This enables the construction of an adaptive, acceleration-based constraint map that iteratively refines trajectories toward near-optimal performance under spatially varying track and vehicle behavior. In simulation, our approach achieves a 17.38% lap time reduction compared to a controller parametrized with maximum static acceleration. On real hardware, tested with different tire compounds ranging from high to low friction, we obtain a 7.60% lap time improvement without explicitly parametrizing friction. This demonstrates robustness to changing grip conditions in real-world scenarios.