Constraining Streaming Flow Models for Adapting Learned Robot Trajectory Distributions
作者: Jieting Long, Dechuan Liu, Weidong Cai, Ian Manchester, Weiming Zhi
分类: cs.RO
发布日期: 2026-02-17
备注: 8 pages, 8 figure
💡 一句话要点
提出约束感知流(CASF)框架,用于自适应机器人轨迹分布并满足约束条件
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人轨迹生成 流式策略 约束感知 运动规划 机器人控制
📋 核心要点
- 现有流式策略缺乏在训练后调整轨迹以满足安全和任务约束的机制,限制了其在实际机器人应用中的部署。
- 提出约束感知流(CASF)框架,通过约束相关的度量来重塑学习到的速度场,从而在执行期间自适应调整轨迹。
- 在模拟和真实世界的操作任务中,CASF生成满足约束且平滑、可行和动态一致的轨迹,优于传统方法。
📝 摘要(中文)
机器人运动分布通常呈现多模态特性,需要灵活的生成模型进行精确表示。流式策略(SFPs)通过在动作空间中直接集成学习到的速度场来生成机器人轨迹,从而实现平滑和反应式控制。然而,现有的方法缺乏在训练后调整轨迹以强制执行安全和特定任务约束的机制。我们提出了约束感知流(CASF),该框架通过约束相关的度量来增强流式策略,从而在执行期间重塑学习到的速度场。CASF将每个约束(在机器人工作空间或配置空间中定义)建模为可微距离函数,该函数被转换为局部度量并拉回到机器人的控制空间。远离约束区域时,得到的度量简化为单位矩阵;接近约束边界时,它平滑地衰减或重定向运动,有效地变形底层流以保持安全。这允许实时调整轨迹,确保机器人动作尊重关节限制、避免碰撞并保持在可行的工作空间内,同时保留流式策略的多模态和反应式特性。我们在模拟和真实世界的操作任务中展示了CASF,表明它产生满足约束的轨迹,这些轨迹保持平滑、可行和动态一致,优于标准的事后投影基线。
🔬 方法详解
问题定义:论文旨在解决机器人轨迹生成中,如何使学习到的轨迹分布能够满足各种约束条件,如关节限制、碰撞避免和工作空间限制等。现有的流式策略虽然能够生成平滑和反应式的轨迹,但缺乏在训练后根据约束条件进行调整的能力,导致生成的轨迹可能违反约束,影响机器人的安全性和任务完成。
核心思路:论文的核心思路是将约束条件转化为可微的距离函数,并将其转换为局部度量,从而在机器人的控制空间中重塑学习到的速度场。通过这种方式,当机器人接近约束边界时,速度场会受到约束的影响,从而引导机器人避开约束区域,生成满足约束的轨迹。
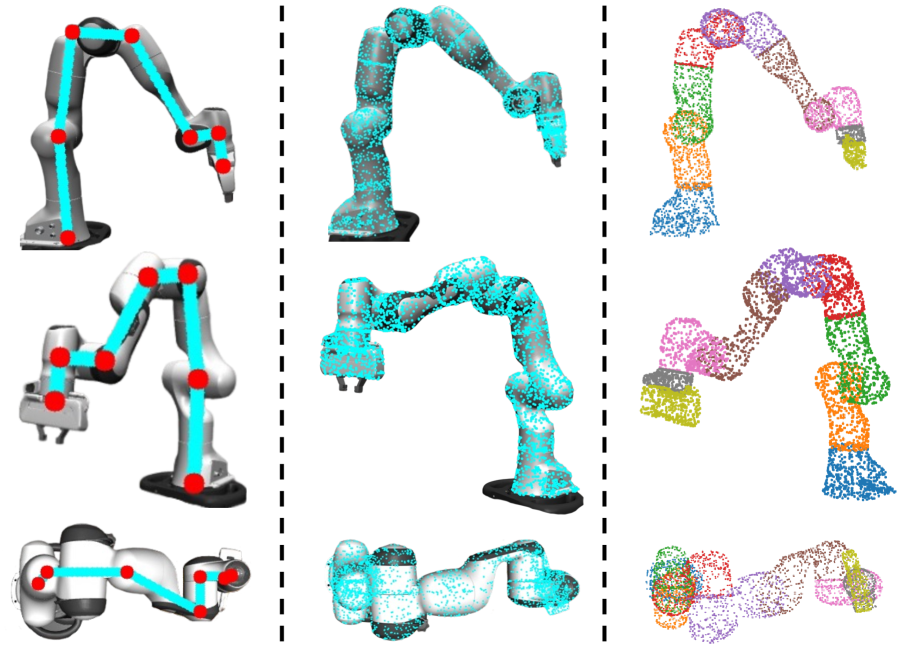
技术框架:CASF框架主要包含以下几个模块:1) 流式策略(SFP):用于生成初始的机器人轨迹;2) 约束建模:将各种约束条件(如关节限制、碰撞避免等)建模为可微的距离函数;3) 度量转换:将距离函数转换为局部度量,该度量反映了约束对机器人运动的影响;4) 速度场重塑:利用局部度量来调整流式策略学习到的速度场,从而生成满足约束的轨迹。
关键创新:CASF的关键创新在于将约束条件融入到流式策略的速度场中,从而实现了轨迹的实时自适应调整。与传统的事后投影方法相比,CASF能够生成更加平滑和动态一致的轨迹,同时更好地满足约束条件。此外,CASF框架具有通用性,可以应用于各种类型的约束条件。
关键设计:约束建模采用可微的距离函数,例如,可以使用 signed distance function (SDF) 来表示环境中的障碍物。度量转换将距离函数映射到控制空间中的局部度量,可以使用高斯函数或其他平滑函数来实现。速度场重塑通过将局部度量与原始速度场进行加权平均来实现,权重的大小取决于机器人与约束边界的距离。
🖼️ 关键图片

📊 实验亮点
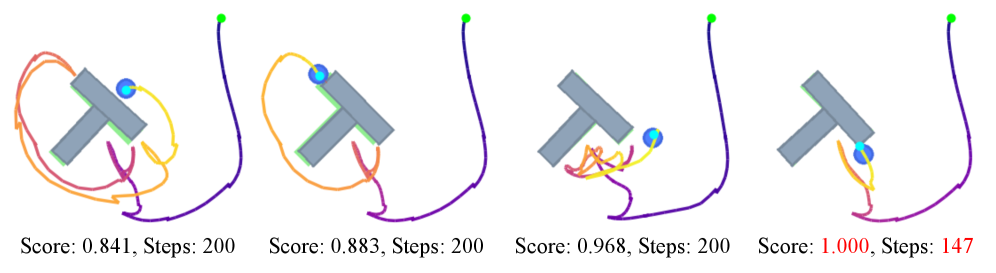
实验结果表明,CASF框架能够生成满足约束条件的轨迹,并且在轨迹的平滑性、可行性和动态一致性方面优于标准的事后投影基线。在模拟和真实世界的操作任务中,CASF能够有效地避免碰撞、尊重关节限制,并保持在可行的工作空间内。具体而言,CASF在满足约束条件的同时,能够保持较高的任务完成率,并且生成的轨迹更加自然和流畅。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如装配、抓取、避障等。通过CASF框架,机器人能够生成满足约束条件的轨迹,从而提高其安全性和可靠性。此外,该方法还可以应用于自动驾驶、无人机等领域,以确保车辆或飞行器在复杂环境中安全运行。未来,该研究有望推动机器人技术在工业、医疗、服务等领域的广泛应用。
📄 摘要(原文)
Robot motion distributions often exhibit multi-modality and require flexible generative models for accurate representation. Streaming Flow Policies (SFPs) have recently emerged as a powerful paradigm for generating robot trajectories by integrating learned velocity fields directly in action space, enabling smooth and reactive control. However, existing formulations lack mechanisms for adapting trajectories post-training to enforce safety and task-specific constraints. We propose Constraint-Aware Streaming Flow (CASF), a framework that augments streaming flow policies with constraint-dependent metrics that reshape the learned velocity field during execution. CASF models each constraint, defined in either the robot's workspace or configuration space, as a differentiable distance function that is converted into a local metric and pulled back into the robot's control space. Far from restricted regions, the resulting metric reduces to the identity; near constraint boundaries, it smoothly attenuates or redirects motion, effectively deforming the underlying flow to maintain safety. This allows trajectories to be adapted in real time, ensuring that robot actions respect joint limits, avoid collisions, and remain within feasible workspaces, while preserving the multi-modal and reactive properties of streaming flow policies. We demonstrate CASF in simulated and real-world manipulation tasks, showing that it produces constraint-satisfying trajectories that remain smooth, feasible, and dynamically consistent, outperforming standard post-hoc projection baselines.