Fluoroscopy-Constrained Magnetic Robot Control via Zernike-Based Field Modeling and Nonlinear MPC
作者: Xinhao Chen, Hongkun Yao, Anuruddha Bhattacharjee, Suraj Raval, Lamar O. Mair, Yancy Diaz-Mercado, Axel Krieger
分类: cs.RO
发布日期: 2026-02-17
💡 一句话要点
提出基于Zernike场建模和非线性MPC的荧光透视约束磁力机器人控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 磁力机器人 模型预测控制 Zernike多项式 荧光透视 卡尔曼滤波
📋 核心要点
- 磁力驱动手术机器人在复杂解剖路径中导航具有优势,但荧光透视成像的低帧率和噪声反馈限制了临床应用。
- 该论文提出了一种结合Zernike多项式磁场建模、非线性模型预测控制和卡尔曼滤波的控制框架,以提高控制精度和稳定性。
- 实验结果表明,即使在模拟临床荧光透视的低帧率和高噪声条件下,该方法仍能保持较高的控制精度,并在脊柱模型中实现了精确的药物递送。
📝 摘要(中文)
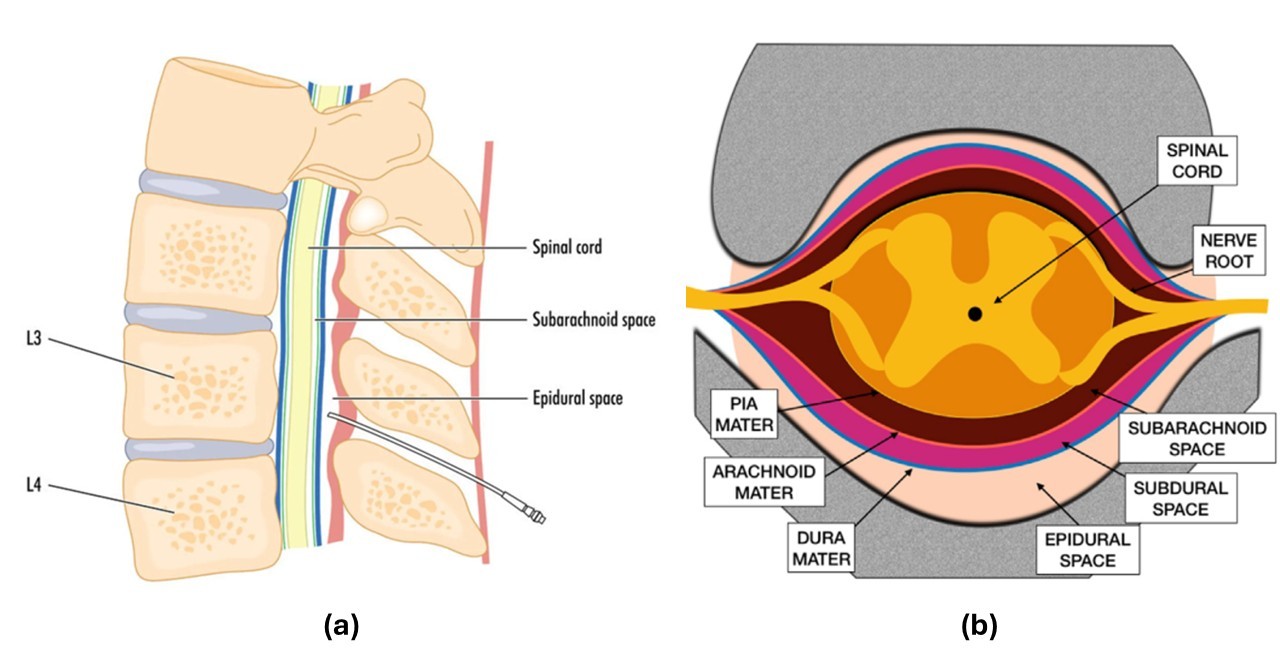
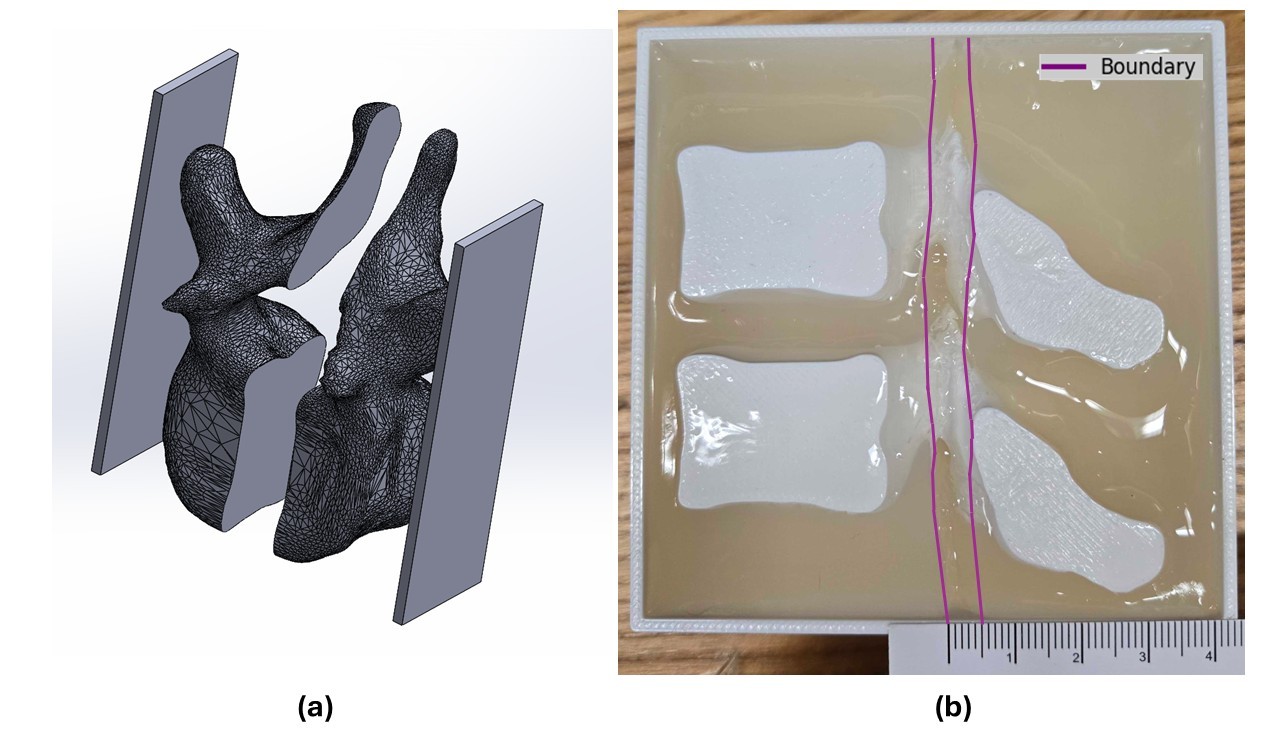
本文提出了一种控制框架,旨在解决在低帧率和噪声姿态反馈的荧光透视成像条件下,磁力机器人控制的精度和稳定性问题。该框架结合了直接输出线圈电流的非线性模型预测控制(NMPC)、基于Zernike多项式的解析可微磁场模型以及用于估计机器人状态的卡尔曼滤波器。通过在3D打印的流体工作空间和模拟硬膜外腔药物递送的脊柱模型中进行的实验验证,结果表明,所提出的控制方法在反馈降采样至3 Hz并添加高斯噪声(sigma = 2 mm)的情况下,仍能保持高精度。在脊柱模型实验中,该方法成功执行了药物递送轨迹,均方根(RMS)位置误差为1.18 mm,同时保持了与关键解剖边界的安全距离。
🔬 方法详解
问题定义:磁力机器人在手术中的应用受到荧光透视成像质量的限制,具体表现为低帧率和噪声大的位姿反馈。现有的控制方法难以在这种条件下保持足够的精度和稳定性,从而阻碍了磁力机器人在临床上的广泛应用。
核心思路:论文的核心思路是结合磁场建模、非线性模型预测控制和状态估计,从而在低质量的视觉反馈下实现精确的磁力机器人控制。通过精确的磁场模型,可以更准确地预测机器人的运动;通过非线性模型预测控制,可以优化线圈电流,实现精确的轨迹跟踪;通过卡尔曼滤波,可以有效地融合视觉反馈和模型预测,提高状态估计的准确性。
技术框架:该控制框架主要包含三个模块:1) 基于Zernike多项式的磁场建模模块,用于建立磁场与线圈电流之间的关系;2) 非线性模型预测控制(NMPC)模块,用于根据期望轨迹和当前状态,优化线圈电流;3) 卡尔曼滤波模块,用于融合荧光透视成像提供的位姿反馈和模型预测,估计机器人的状态。整体流程是:首先,利用卡尔曼滤波器估计机器人当前状态;然后,NMPC模块根据当前状态和期望轨迹,计算出最优的线圈电流;最后,将线圈电流施加到磁力机器人上,实现运动控制。
关键创新:该论文的关键创新在于:1) 使用Zernike多项式建立磁场模型,该模型具有解析可微的特性,便于优化和控制;2) 将NMPC直接应用于线圈电流的控制,避免了中间环节的误差;3) 将卡尔曼滤波与NMPC相结合,有效地提高了在低质量视觉反馈下的控制精度。与现有方法相比,该方法能够更好地适应荧光透视成像的特点,实现更精确和稳定的磁力机器人控制。
关键设计:Zernike多项式用于磁场建模,其系数通过实验标定获得。NMPC的目标函数包括轨迹跟踪误差和线圈电流的惩罚项,通过优化算法求解最优的线圈电流。卡尔曼滤波器的状态转移模型基于磁力机器人的运动学模型,观测模型基于荧光透视成像提供的位姿信息。实验中,反馈频率被降采样至3Hz,并添加了高斯噪声(sigma = 2mm),以模拟临床荧光透视成像的条件。
🖼️ 关键图片

📊 实验亮点
实验结果表明,在模拟临床荧光透视成像条件下(3 Hz反馈频率,sigma = 2 mm高斯噪声),该方法仍能保持较高的控制精度。在脊柱模型实验中,该方法成功执行了药物递送轨迹,均方根(RMS)位置误差为1.18 mm,同时保持了与关键解剖边界的安全距离。这些结果验证了该方法在实际临床应用中的潜力。
🎯 应用场景
该研究成果可应用于微创手术、药物递送、介入治疗等领域。通过提高在低质量成像条件下的磁力机器人控制精度,可以扩展磁力机器人在临床上的应用范围,例如在脊柱、血管等复杂解剖结构中进行精确的操作,从而减少手术创伤,提高治疗效果。未来,该技术有望与增强现实等技术结合,为医生提供更直观的手术导航。
📄 摘要(原文)
Magnetic actuation enables surgical robots to navigate complex anatomical pathways while reducing tissue trauma and improving surgical precision. However, clinical deployment is limited by the challenges of controlling such systems under fluoroscopic imaging, which provides low frame rate and noisy pose feedback. This paper presents a control framework that remains accurate and stable under such conditions by combining a nonlinear model predictive control (NMPC) framework that directly outputs coil currents, an analytically differentiable magnetic field model based on Zernike polynomials, and a Kalman filter to estimate the robot state. Experimental validation is conducted with two magnetic robots in a 3D-printed fluid workspace and a spine phantom replicating drug delivery in the epidural space. Results show the proposed control method remains highly accurate when feedback is downsampled to 3 Hz with added Gaussian noise (sigma = 2 mm), mimicking clinical fluoroscopy. In the spine phantom experiments, the proposed method successfully executed a drug delivery trajectory with a root mean square (RMS) position error of 1.18 mm while maintaining safe clearance from critical anatomical boundaries.