OSCAR: An Ovipositor-Inspired Self-Propelling Capsule Robot for Colonoscopy
作者: Mostafa A. Atalla, Anand S. Sekar, Remi van Starkenburg, David J. Jager, Aimée Sakes, Michaël Wiertlewski, Paul Breedveld
分类: cs.RO, physics.med-ph
发布日期: 2026-02-17
💡 一句话要点
OSCAR:一种受产卵器启发的自推进胶囊机器人,用于结肠镜检查
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 胶囊机器人 结肠镜检查 自推进 摩擦各向异性 生物启发 医疗机器人 粘弹性 产卵器
📋 核心要点
- 传统结肠镜检查存在轴环问题,导致患者不适,而现有自推进胶囊机器人在结肠内可靠移动面临挑战。
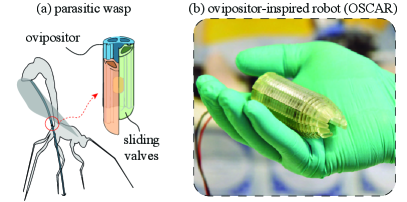
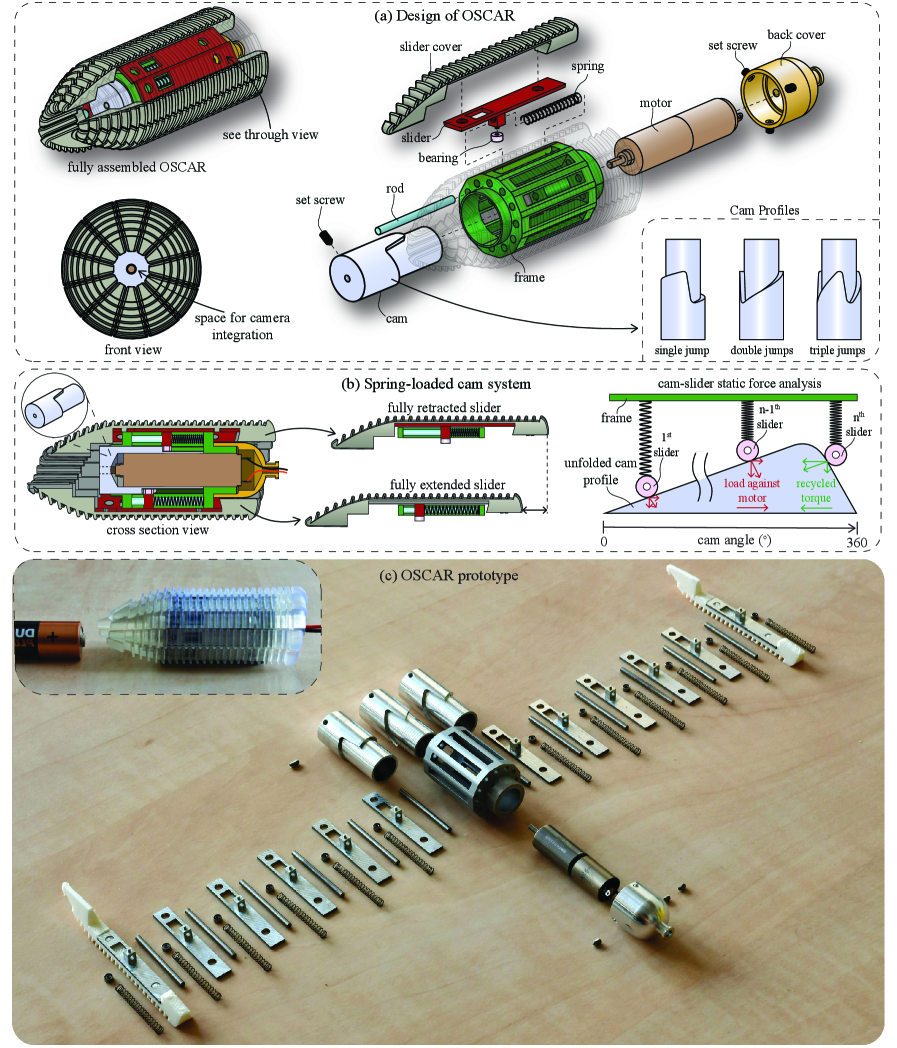
- OSCAR通过模仿寄生蜂产卵器运动,利用弹簧凸轮系统驱动滑块,产生可控的摩擦各向异性,实现自推进。
- 实验表明,OSCAR能产生0.85N的牵引力,速度达3.08mm/s,足以匹配传统结肠镜检查速度,且推力可预测。
📝 摘要(中文)
自推进机器人胶囊消除了传统结肠镜检查中轴环的形成,从而减少了患者的不适。然而,在结肠的湿滑、粘弹性环境中可靠地移动仍然是一个重大挑战。我们提出OSCAR,一种受产卵器启发的自推进胶囊机器人,它将寄生蜂的运输策略转化为结肠镜检查的推进机制。OSCAR通过一个弹簧加载的凸轮系统机械地编码受产卵器启发的运动模式,该系统以协调的、相移的顺序驱动十二个圆周滑块。通过调整运动曲线以最大化相对于前进阶段的收缩阶段,该胶囊在界面处产生可控的摩擦各向异性,从而产生净向前推力。我们开发了一个分析模型,结合Kelvin-Voigt公式来捕捉滑块和组织之间的粘弹性粘滑相互作用,将前进和收缩阶段持续时间之间的不对称性与平均推力联系起来,并将滑块反转同步与推力稳定性联系起来。在离体猪结肠中进行的全面力特性实验显示,平均稳态牵引力为0.85 N,与模型非常吻合。此外,实验证实,推力产生与速度无关,并与相位不对称性线性相关,与理论预测一致,突显了胶囊的可预测性能和可扩展性。在运动验证实验中,OSCAR表现出强大的性能,实现了平均3.08毫米/秒的速度,该速度足以匹配传统结肠镜检查的盲肠插管时间。通过将相位编码的摩擦各向异性与预测模型相结合,OSCAR以低法向载荷提供可控的推力产生,从而为机器人胶囊结肠镜检查实现更安全、更强大的自推进运动。
🔬 方法详解
问题定义:现有结肠镜检查方法,特别是传统结肠镜检查,存在轴环问题,导致患者不适。自推进胶囊机器人旨在解决这个问题,但其在结肠内湿滑、粘弹性环境中可靠移动仍然是一个挑战。现有方法难以在低法向载荷下产生足够且可控的推力,从而影响了运动的稳定性和安全性。
核心思路:OSCAR的核心思路是模仿寄生蜂的产卵器运动机制,将这种运动模式转化为胶囊机器人的推进方式。通过控制滑块的运动相位,在胶囊与结肠壁之间产生可控的摩擦各向异性。具体来说,通过优化前进和后退阶段的时间比例,使得后退阶段的摩擦力大于前进阶段,从而产生净向前推力。这种设计能够在低法向载荷下实现有效的推进,降低对结肠壁的损伤风险。
技术框架:OSCAR的整体架构包括一个弹簧加载的凸轮系统,该系统驱动十二个圆周滑块。凸轮系统的设计决定了滑块的运动模式,通过调整凸轮的形状和弹簧的参数,可以控制滑块的运动速度和相位。滑块与结肠壁接触,通过摩擦力产生推力。此外,论文还建立了一个分析模型,该模型基于Kelvin-Voigt公式,用于描述滑块与组织之间的粘弹性粘滑相互作用。该模型可以将运动参数(如前进和后退阶段的时间比例)与推力大小和稳定性联系起来。
关键创新:OSCAR最重要的技术创新点在于将生物启发式的产卵器运动机制应用于胶囊机器人的推进系统。与传统的推进方法相比,OSCAR通过控制摩擦各向异性来实现推进,而不是依赖于高法向载荷或复杂的机械结构。这种方法能够在低法向载荷下产生可控的推力,从而提高了运动的安全性和稳定性。此外,论文提出的分析模型能够预测推力大小和稳定性,为优化运动参数提供了理论依据。
关键设计:OSCAR的关键设计包括凸轮系统的形状、弹簧的参数以及滑块的材料和形状。凸轮系统的形状决定了滑块的运动模式,需要进行优化以最大化后退阶段的摩擦力。弹簧的参数影响滑块的运动速度和力的大小。滑块的材料和形状需要选择合适的材料和形状,以保证与结肠壁之间的摩擦力足够大,同时又不会对结肠壁造成损伤。此外,分析模型中的Kelvin-Voigt参数也需要根据实验数据进行标定,以提高模型的预测精度。
🖼️ 关键图片

📊 实验亮点
OSCAR在离体猪结肠实验中表现出色,实现了0.85N的平均稳态牵引力,与理论模型预测高度吻合。运动验证实验中,平均速度达到3.08mm/s,足以匹配传统结肠镜检查速度。实验还证实,推力产生与速度无关,并与相位不对称性线性相关,验证了其可预测性和可扩展性。
🎯 应用场景
OSCAR技术可应用于结肠镜检查,降低患者不适,提高检查效率和安全性。该技术还可扩展到其他医疗机器人领域,如胃肠道检查、药物递送等,具有广阔的应用前景。未来,结合人工智能和图像识别技术,可实现更智能化的胶囊机器人导航和诊断。
📄 摘要(原文)
Self-propelling robotic capsules eliminate shaft looping of conventional colonoscopy, reducing patient discomfort. However, reliably moving within the slippery, viscoelastic environment of the colon remains a significant challenge. We present OSCAR, an ovipositor-inspired self-propelling capsule robot that translates the transport strategy of parasitic wasps into a propulsion mechanism for colonoscopy. OSCAR mechanically encodes the ovipositor-inspired motion pattern through a spring-loaded cam system that drives twelve circumferential sliders in a coordinated, phase-shifted sequence. By tuning the motion profile to maximize the retract phase relative to the advance phase, the capsule creates a controlled friction anisotropy at the interface that generates net forward thrust. We developed an analytical model incorporating a Kelvin-Voigt formulation to capture the viscoelastic stick--slip interactions between the sliders and the tissue, linking the asymmetry between advance and retract phase durations to mean thrust, and slider-reversal synchronization to thrust stability. Comprehensive force characterization experiments in ex-vivo porcine colon revealed a mean steady-state traction force of 0.85 N, closely matching the model. Furthermore, experiments confirmed that thrust generation is speed-independent and scales linearly with the phase asymmetry, in agreement with theoretical predictions, underscoring the capsule's predictable performance and scalability. In locomotion validation experiments, OSCAR demonstrated robust performance, achieving an average speed of 3.08 mm/s, a velocity sufficient to match the cecal intubation times of conventional colonoscopy. By coupling phase-encoded friction anisotropy with a predictive model, OSCAR delivers controllable thrust generation at low normal loads, enabling safer and more robust self-propelling locomotion for robotic capsule colonoscopy.