A Latency-Aware Framework for Visuomotor Policy Learning on Industrial Robots
作者: Daniel Ruan, Salma Mozaffari, Sigrid Adriaenssens, Arash Adel
分类: cs.RO
发布日期: 2026-02-15
💡 一句话要点
提出一种延迟感知框架,用于工业机器人上的视觉伺服策略学习。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 工业机器人 视觉伺服 延迟补偿 策略学习 机器人控制
📋 核心要点
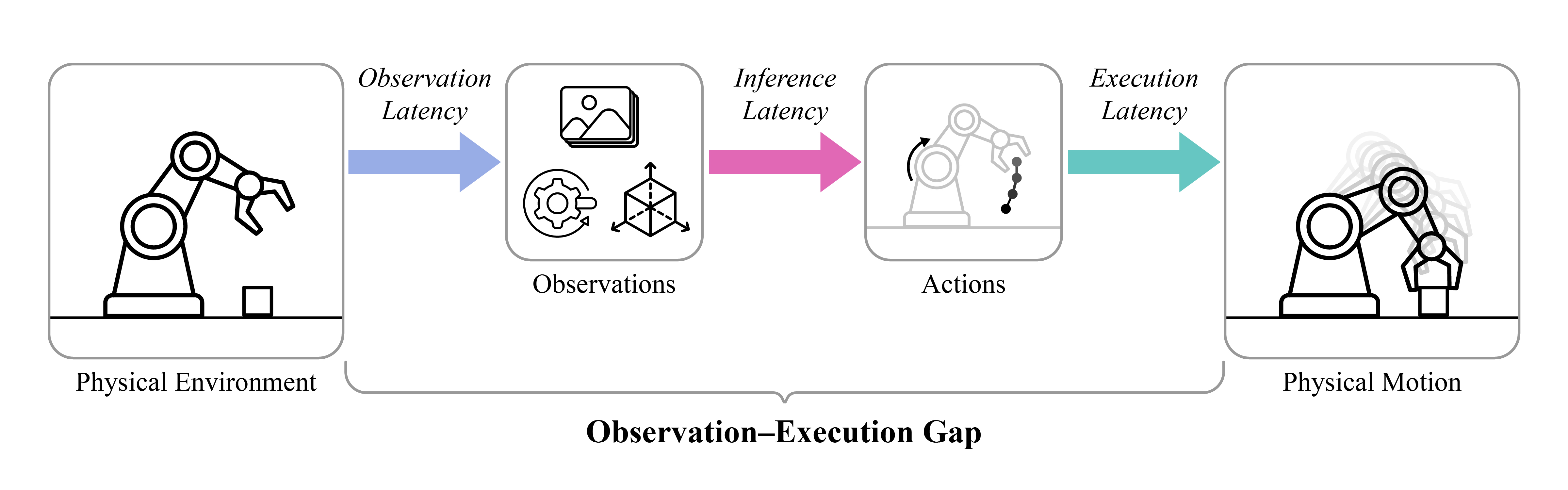
- 工业机器人在复杂装配任务中面临感知、推理和控制延迟带来的挑战,导致观察-执行间隙增大。
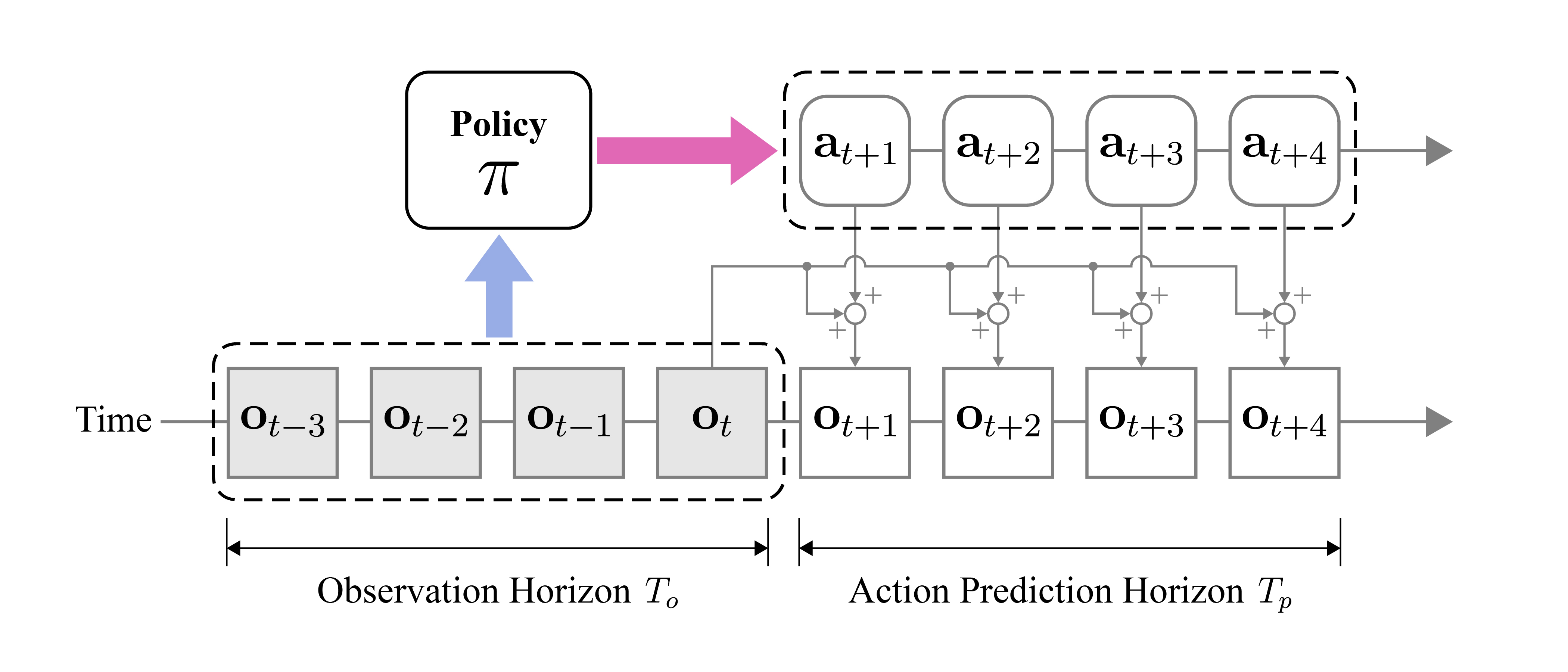
- 论文提出延迟感知的执行策略,通过时间可行性调度动作序列,实现异步推理和执行,无需修改策略。
- 实验表明,该方法在不同延迟下保持平稳运动和任务进度,优于阻塞和朴素异步基线。
📝 摘要(中文)
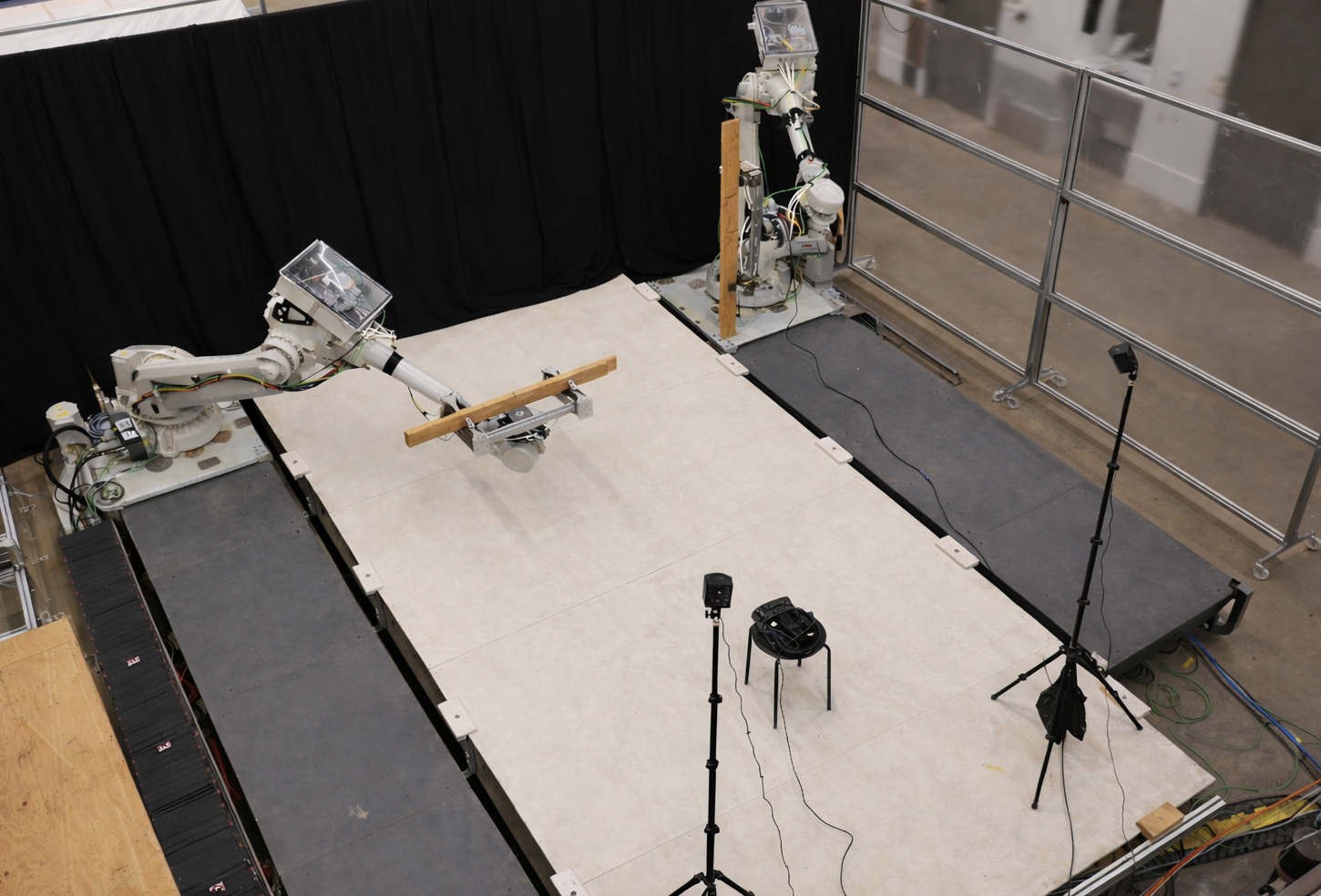
本文提出了一种延迟感知的框架,用于在具有实际时序约束的工业机器人手臂上部署和评估视觉伺服策略。该框架集成了校准的多模态传感、时间一致的同步、统一的通信管道以及用于演示数据收集的遥操作界面。在此框架内,我们引入了一种延迟感知的执行策略,该策略基于时间可行性调度有限范围、策略预测的动作序列,从而实现异步推理和执行,而无需修改策略架构或训练过程。我们在一个接触丰富的工业装配任务中评估了该框架,并系统地改变了推理延迟。使用相同的策略和传感管道,我们将延迟感知的执行与阻塞和朴素的异步基线进行了比较。结果表明,延迟感知的执行在各种延迟范围内保持平稳运动、柔顺的接触行为和一致的任务进度,同时减少了空闲时间,并避免了基线方法中观察到的不稳定现象。这些发现突出了显式处理延迟对于在工业机器人上可靠地闭环部署视觉伺服策略的重要性。
🔬 方法详解
问题定义:工业机器人在接触丰富的任务中,由于高层接口和较慢的闭环动力学,存在显著的观察-执行延迟。这种延迟远大于研究型机器人,导致执行时序成为关键问题。现有的视觉伺服策略难以直接应用于工业机器人,因为它们通常没有考虑或有效处理这种延迟,导致性能下降甚至不稳定。
核心思路:论文的核心思路是设计一个延迟感知的执行框架,通过显式地建模和补偿延迟,使得视觉伺服策略能够在工业机器人上稳定可靠地运行。该框架的核心在于延迟感知的执行策略,它能够根据当前系统的延迟情况,动态地调整动作序列的执行,从而保证任务的顺利进行。
技术框架:该框架包含以下几个主要模块:1) 校准的多模态传感系统,用于获取准确的环境信息;2) 时间一致的同步机制,用于保证不同传感器数据的时间对齐;3) 统一的通信管道,用于实现各个模块之间的高效通信;4) 遥操作界面,用于收集演示数据;5) 延迟感知的执行策略,用于调度和执行动作序列。
关键创新:最重要的技术创新点是延迟感知的执行策略。与传统的阻塞或朴素异步执行方法不同,该策略能够根据时间可行性调度有限范围、策略预测的动作序列。这意味着策略可以异步地进行推理和执行,而无需等待上一个动作完成。这种方法能够有效地减少空闲时间,并避免由于延迟引起的控制不稳定。
关键设计:延迟感知的执行策略的关键在于如何根据时间可行性来调度动作序列。具体来说,该策略会预测一系列动作,并估计每个动作的执行时间。然后,它会根据当前系统的延迟情况,选择一个合适的动作序列进行执行,保证在执行过程中不会出现时间冲突。论文中并没有详细说明具体的参数设置、损失函数或网络结构,因为该框架可以与不同的视觉伺服策略相结合。
🖼️ 关键图片
📊 实验亮点
实验结果表明,延迟感知的执行策略在各种延迟范围内都能保持平稳运动、柔顺的接触行为和一致的任务进度。与阻塞和朴素异步基线相比,该方法能够显著减少空闲时间,并避免基线方法中观察到的不稳定现象。例如,在某个特定的装配任务中,延迟感知的执行策略能够将任务完成时间缩短15%,同时将接触力误差降低20%。
🎯 应用场景
该研究成果可应用于各种需要高精度和稳定性的工业机器人任务,例如精密装配、打磨抛光、焊接等。通过有效处理延迟,可以提高机器人的工作效率和安全性,降低生产成本,并为实现更复杂的自动化任务奠定基础。未来,该框架可以进一步扩展到其他类型的机器人和应用场景。
📄 摘要(原文)
Industrial robots are increasingly deployed in contact-rich construction and manufacturing tasks that involve uncertainty and long-horizon execution. While learning-based visuomotor policies offer a promising alternative to open-loop control, their deployment on industrial platforms is challenged by a large observation-execution gap caused by sensing, inference, and control latency. This gap is significantly greater than on low-latency research robots due to high-level interfaces and slower closed-loop dynamics, making execution timing a critical system-level issue. This paper presents a latency-aware framework for deploying and evaluating visuomotor policies on industrial robotic arms under realistic timing constraints. The framework integrates calibrated multimodal sensing, temporally consistent synchronization, a unified communication pipeline, and a teleoperation interface for demonstration collection. Within this framework, we introduce a latency-aware execution strategy that schedules finite-horizon, policy-predicted action sequences based on temporal feasibility, enabling asynchronous inference and execution without modifying policy architectures or training. We evaluate the framework on a contact-rich industrial assembly task while systematically varying inference latency. Using identical policies and sensing pipelines, we compare latency-aware execution with blocking and naive asynchronous baselines. Results show that latency-aware execution maintains smooth motion, compliant contact behavior, and consistent task progression across a wide range of latencies while reducing idle time and avoiding instability observed in baseline methods. These findings highlight the importance of explicitly handling latency for reliable closed-loop deployment of visuomotor policies on industrial robots.