Direction Matters: Learning Force Direction Enables Sim-to-Real Contact-Rich Manipulation
作者: Yifei Yang, Anzhe Chen, Zhenjie Zhu, Kechun Xu, Yunxuan Mao, Yufei Wei, Lu Chen, Rong Xiong, Yue Wang
分类: cs.RO
发布日期: 2026-02-15
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于力方向学习的Sim-to-Real接触操作迁移框架,解决接触动力学差异问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Sim-to-Real 接触操作 力方向学习 导纳控制 机器人控制
📋 核心要点
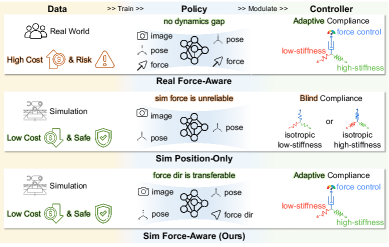
- 接触操作的Sim-to-Real迁移面临接触动力学差异的挑战,现有方法依赖昂贵的真实数据或盲目的柔顺控制。
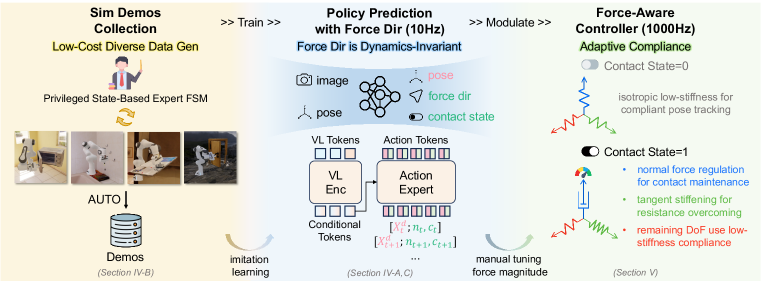
- 该论文提出利用仿真中专家设计的位姿/力控制器,学习预测鲁棒的接触力方向,指导力感知的导纳控制器。
- 在四个真实任务上的实验表明,该方法显著提升了成功率和鲁棒性,优于现有基线方法。
📝 摘要(中文)
本文提出了一种用于接触操作的Sim-to-Real迁移框架,旨在解决接触动力学差异带来的挑战。该框架利用专家设计的控制器逻辑进行迁移,在仿真中使用基于有限状态机的位姿/力控制器提供特权指导。训练后的策略预测末端执行器的位姿、接触状态以及期望的接触力方向。与对仿真不准确性高度敏感的力的大小不同,力方向编码了高层次的任务几何信息,并且在Sim-to-Real之间更加鲁棒。在部署时,这些预测用于配置力感知的导纳控制器。通过将策略的方向意图与手动调整的低成本恒定力大小相结合,系统生成自适应的、任务对齐的柔顺性。该调整过程非常轻量级,通常每个接触状态只需要一个标量。论文提供了稳定性和抗扰动性的理论分析。在四个真实世界的任务(微波炉开启、插孔、白板擦拭和开门)上的实验表明,该方法在成功率和鲁棒性方面均显著优于强大的基线。
🔬 方法详解
问题定义:Sim-to-Real接触操作迁移面临的主要问题是仿真环境与真实环境之间接触动力学的差异。现有方法要么依赖于大量的真实世界数据进行训练,这成本高昂;要么采用固定的柔顺控制策略,无法适应不同的任务需求,导致性能受限。因此,如何在缺乏大量真实数据的情况下,实现鲁棒的接触操作迁移是一个关键挑战。
核心思路:该论文的核心思路是利用专家设计的控制器在仿真环境中提供特权指导,学习对Sim-to-Real差异更鲁棒的特征。具体而言,论文没有直接学习难以精确建模的力的大小,而是学习接触力方向。力方向编码了高层次的任务几何信息,对仿真误差不敏感,更易于迁移。通过学习力方向,并结合简单的力大小控制,可以实现自适应的柔顺控制。
技术框架:整体框架包含仿真训练和真实世界部署两个阶段。在仿真训练阶段,使用专家设计的有限状态机(FSM)位姿/力控制器作为特权信息,训练一个策略网络,该网络预测末端执行器的位姿、接触状态以及期望的接触力方向。在真实世界部署阶段,将策略网络预测的力方向与手动调整的力大小相结合,配置一个力感知的导纳控制器,实现自适应的柔顺控制。
关键创新:该论文最重要的技术创新在于学习接触力方向而非力的大小。力的大小对仿真误差非常敏感,难以直接迁移。而力方向编码了任务的几何信息,对仿真误差具有更强的鲁棒性。通过学习力方向,并结合简单的力大小控制,可以实现高效的Sim-to-Real迁移。
关键设计:策略网络的设计是关键。该网络以仿真环境的状态作为输入,输出末端执行器的位姿、接触状态以及期望的接触力方向。损失函数的设计需要平衡位姿预测、接触状态预测和力方向预测的准确性。在真实世界部署阶段,力大小的调整是一个关键参数,通常只需要针对每个接触状态调整一个标量值。
🖼️ 关键图片

📊 实验亮点
该论文在四个真实世界的任务(微波炉开启、插孔、白板擦拭和开门)上进行了实验。实验结果表明,该方法在成功率和鲁棒性方面均显著优于强大的基线方法。例如,在插孔任务中,该方法的成功率比最佳基线提高了超过20%。此外,该方法只需要少量的人工调整,即可实现良好的性能。
🎯 应用场景
该研究成果可应用于各种需要精确接触操作的机器人任务,例如装配、维护、医疗手术等。通过降低对真实世界数据的依赖,可以加速机器人在复杂环境中的部署,提高自动化水平。该方法在工业自动化、服务机器人等领域具有广阔的应用前景。
📄 摘要(原文)
Sim-to-real transfer for contact-rich manipulation remains challenging due to the inherent discrepancy in contact dynamics. While existing methods often rely on costly real-world data or utilize blind compliance through fixed controllers, we propose a framework that leverages expert-designed controller logic for transfer. Inspired by the success of privileged supervision in kinematic tasks, we employ a human-designed finite state machine based position/force controller in simulation to provide privileged guidance. The resulting policy is trained to predict the end-effector pose, contact state, and crucially the desired contact force direction. Unlike force magnitudes, which are highly sensitive to simulation inaccuracies, force directions encode high-level task geometry and remain robust across the sim-to-real gap. At deployment, these predictions configure a force-aware admittance controller. By combining the policy's directional intent with a constant, low-cost manually tuned force magnitude, the system generates adaptive, task-aligned compliance. This tuning is lightweight, typically requiring only a single scalar per contact state. We provide theoretical analysis for stability and robustness to disturbances. Experiments on four real-world tasks, i.e., microwave opening, peg-in-hole, whiteboard wiping, and door opening, demonstrate that our approach significantly outperforms strong baselines in both success rate and robustness. Videos are available at: https://yifei-y.github.io/project-pages/DirectionMatters/.