Rigidity-Based Multi-Finger Coordination for Precise In-Hand Manipulation of Force-Sensitive Objects
作者: Xinan Rong, Changhuang Wan, Aochen He, Xiaolong Li, Gangshan Jing
分类: cs.RO, eess.SY
发布日期: 2026-02-15
备注: This paper has been accepted by IEEE Robotics and Automation Letters. The experimental video is avaialable at: https://www.youtube.com/watch?v=kcf9dVW0Dpo
💡 一句话要点
提出基于刚性的多指协调框架,实现力敏感物体的精确灵巧操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多指灵巧手 灵巧操作 力控制 图刚性 力闭合 无触觉反馈 接触力规划
📋 核心要点
- 多指灵巧手缺乏力反馈和拉力能力,难以精确操作力敏感物体,现有方法难以同时满足力规划和无触觉反馈的需求。
- 提出双层框架,结合图刚性和力闭合约束进行接触力规划,并通过力-位置映射实现关节轨迹控制,无需触觉反馈。
- 在定制灵巧手上验证,成功操作柔软纱线、塑料杯和生鸡蛋等脆弱物体,验证了框架的高精度和安全性。
📝 摘要(中文)
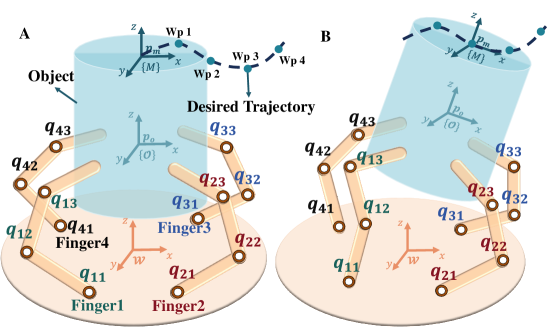
针对力敏感物体的精确灵巧操作,提出了一种双层多指协调框架,该框架通过联合控制实现高精度操作,无需触觉反馈。与具有末端执行器的多臂平台不同,多指手仅依赖指尖点接触,无法施加拉力,因此面临更大的挑战。此外,大多数商用灵巧手缺乏校准的扭矩传感器,增加了难度。该方法通过结合图刚性和力闭合约束来解决协调接触力规划问题。通过采用力-位置映射,将规划的力轨迹转换为关节轨迹。在定制的灵巧手上验证了该框架,展示了高精度和安全地操作脆弱物体的能力,包括柔软的纱线、塑料杯和生鸡蛋。
🔬 方法详解
问题定义:论文旨在解决多指灵巧手在无触觉反馈的情况下,如何精确操作力敏感物体的问题。现有方法通常依赖于精确的力传感器和复杂的力控制算法,但在缺乏这些条件或物体过于脆弱时,难以保证操作的精度和安全性。此外,多指手仅能提供点接触,无法施加拉力,进一步增加了操作的难度。
核心思路:论文的核心思路是将接触力规划问题转化为一个基于图刚性和力闭合约束的优化问题。通过分析物体和手指之间的接触刚性,确保操作过程中物体的稳定性。同时,利用力闭合约束保证手指能够对物体施加足够的力,防止物体滑落。然后,通过力-位置映射,将规划的力轨迹转化为关节轨迹,从而实现对灵巧手的控制。
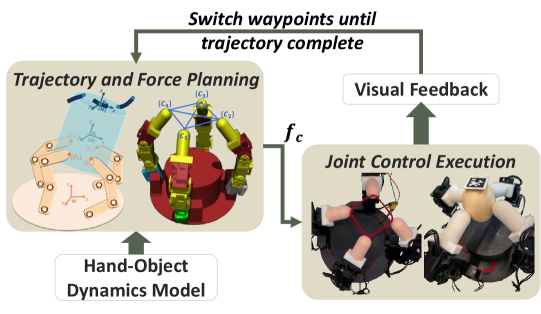
技术框架:该框架包含两个主要层次:接触力规划层和关节轨迹控制层。在接触力规划层,首先建立物体和手指之间的接触模型,然后根据图刚性和力闭合约束,求解最优的接触力分布。在关节轨迹控制层,利用力-位置映射,将规划的接触力转化为关节空间的目标位置,最后通过关节控制器实现对灵巧手的精确控制。
关键创新:该论文的关键创新在于将图刚性理论引入到多指灵巧手的接触力规划中。通过分析接触刚性,可以更好地理解物体在操作过程中的稳定性,从而设计更有效的力规划策略。此外,该方法无需依赖触觉反馈,降低了对硬件的要求,使其更易于在实际应用中部署。
关键设计:在接触力规划层,论文采用了一种基于优化的方法来求解最优的接触力分布。目标函数包括最小化接触力的大小和最大化操作的稳定性。约束条件包括图刚性约束、力闭合约束和关节力矩约束。在力-位置映射中,论文采用了一种线性映射关系,将接触力转化为关节空间的目标位置。具体的参数设置需要根据灵巧手的具体结构和物体的特性进行调整。
🖼️ 关键图片

📊 实验亮点
该研究在定制的灵巧手上进行了验证,成功地操作了柔软的纱线、塑料杯和生鸡蛋等脆弱物体。实验结果表明,该框架能够实现高精度和安全的灵巧操作,无需触觉反馈。通过调整接触力规划策略,可以适应不同物体的特性,具有较强的鲁棒性。虽然论文中没有给出具体的性能数据,但实验结果充分证明了该方法的有效性。
🎯 应用场景
该研究成果可应用于各种需要精确操作力敏感物体的场景,例如医疗手术、精密装配、食品加工等。在医疗手术中,可以利用该技术进行微创手术,减少对患者的损伤。在精密装配中,可以用于组装电子元件等精密部件。在食品加工中,可以用于处理易碎的食品,例如水果和蔬菜。该技术具有广泛的应用前景,有望提高生产效率和产品质量。
📄 摘要(原文)
Precise in-hand manipulation of force-sensitive objects typically requires judicious coordinated force planning as well as accurate contact force feedback and control. Unlike multi-arm platforms with gripper end effectors, multi-fingered hands rely solely on fingertip point contacts and are not able to apply pull forces, therefore poses a more challenging problem. Furthermore, calibrated torque sensors are lacking in most commercial dexterous hands, adding to the difficulty. To address these challenges, we propose a dual-layer framework for multi-finger coordination, enabling high-precision manipulation of force-sensitive objects through joint control without tactile feedback. This approach solves coordinated contact force planning by incorporating graph rigidity and force closure constraints. By employing a force-to-position mapping, the planned force trajectory is converted to a joint trajectory. We validate the framework on a custom dexterous hand, demonstrating the capability to manipulate fragile objects-including a soft yarn, a plastic cup, and a raw egg-with high precision and safety.