Joint Task Assistance Planning via Nested Branch and Bound (Extended Version)
作者: Omer Daube, Oren Salzman
分类: cs.RO
发布日期: 2026-02-15
💡 一句话要点
提出嵌套分支定界算法,解决机器人协作中联合任务辅助规划问题
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting)
关键词: 机器人协作 任务辅助规划 分支定界算法 路径规划 机器人路径 嵌套优化 时间约束
📋 核心要点
- 机器人协作中的任务辅助规划面临路径组合爆炸和时间约束的双重挑战。
- 论文提出嵌套分支定界框架,分层探索路径空间,优化辅助持续时间。
- 实验结果表明,该算法相比基线方法,速度提升高达两个数量级。
📝 摘要(中文)
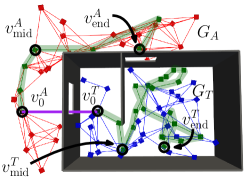
本文提出并研究了联合任务辅助规划问题,该问题推广了先前关于优化机器人协作辅助的研究。在此设置中,两个机器人在预定义的路线图上运行,每个路线图表示为其配置空间对应的图。一个机器人(任务机器人)必须执行定时任务,而另一个机器人(辅助机器人)提供基于传感器的支持,这种支持取决于它们之间的空间关系。目标是计算两个机器人的路径,以最大化给定的总辅助持续时间。由于可能的路径组合的组合爆炸以及问题的时间性质(需要考虑时间),解决这个问题具有挑战性。为了解决这个问题,我们提出了一个嵌套的分支定界框架,该框架以分层的方式有效地探索机器人路径空间。我们通过实验评估了我们的算法,并证明与基线方法相比,速度提高了高达两个数量级。
🔬 方法详解
问题定义:论文旨在解决联合任务辅助规划问题,即在两个机器人协作场景下,如何规划任务机器人和辅助机器人的路径,使得辅助机器人能够尽可能长时间地为任务机器人提供辅助。现有方法在处理大规模路径规划时,容易陷入组合爆炸,难以在合理时间内找到最优解,尤其是在考虑时间因素的情况下。
核心思路:论文的核心思路是利用嵌套的分支定界算法,将复杂的路径搜索问题分解为多个层次的子问题,并逐步缩小搜索空间。通过剪枝操作,排除不可能达到最优解的路径组合,从而提高搜索效率。这种分层搜索策略能够有效地应对路径组合爆炸的问题。
技术框架:该方法采用嵌套的分支定界框架。外层分支定界负责搜索任务机器人的路径,内层分支定界则在任务机器人路径确定的情况下,搜索辅助机器人的最优路径。在搜索过程中,利用辅助持续时间作为目标函数,并根据空间关系和时间约束进行评估。框架包含以下主要模块:路径生成、辅助评估、分支定界搜索和剪枝。
关键创新:该方法最重要的创新点在于嵌套的分支定界框架,它允许算法以分层的方式探索路径空间,从而显著减少了搜索的复杂性。与传统的单层分支定界方法相比,该方法能够更有效地处理大规模的路径规划问题,并找到更优的解决方案。
关键设计:在分支定界过程中,需要设计合适的启发式函数来评估每个节点的潜在价值,并根据评估结果进行剪枝。此外,还需要考虑时间约束,确保两个机器人的运动轨迹在时间上是同步的。具体的参数设置包括分支因子、剪枝阈值等,这些参数需要根据具体的应用场景进行调整。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的嵌套分支定界算法在联合任务辅助规划问题上表现出色。与基线方法相比,该算法能够实现高达两个数量级的速度提升。具体而言,在相同的时间内,该算法能够找到更优的路径组合,从而最大化辅助持续时间。这表明该算法在实际应用中具有显著的优势。
🎯 应用场景
该研究成果可应用于各种机器人协作场景,例如:工业自动化中,辅助机器人为装配机器人提供物料或工具;搜救行动中,辅助机器人为搜救机器人提供环境感知信息;医疗手术中,辅助机器人为手术机器人提供辅助操作。该方法能够提高机器人协作效率,降低人工干预成本,并提升任务完成的质量和安全性。
📄 摘要(原文)
We introduce and study the Joint Task Assistance Planning problem which generalizes prior work on optimizing assistance in robotic collaboration. In this setting, two robots operate over predefined roadmaps, each represented as a graph corresponding to its configuration space. One robot, the task robot, must execute a timed mission, while the other, the assistance robot, provides sensor-based support that depends on their spatial relationship. The objective is to compute a path for both robots that maximizes the total duration of assistance given. Solving this problem is challenging due to the combinatorial explosion of possible path combinations together with the temporal nature of the problem (time needs to be accounted for as well). To address this, we propose a nested branch-and-bound framework that efficiently explores the space of robot paths in a hierarchical manner. We empirically evaluate our algorithm and demonstrate a speedup of up to two orders of magnitude when compared to a baseline approach.