UAV-SEAD: State Estimation Anomaly Dataset for UAVs
作者: Aykut Kabaoglu, Sanem Sariel
分类: cs.RO
发布日期: 2026-02-14
💡 一句话要点
UAV-SEAD:用于无人机状态估计异常检测的大规模真实世界数据集
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 无人机 状态估计 异常检测 数据集 PX4
📋 核心要点
- 无人机状态估计的准确性至关重要,但现有数据集主要依赖模拟数据和注入故障,缺乏真实世界异常数据。
- 论文构建了一个大规模的真实无人机飞行数据集,包含正常和异常飞行数据,无需人工合成,更贴近实际应用场景。
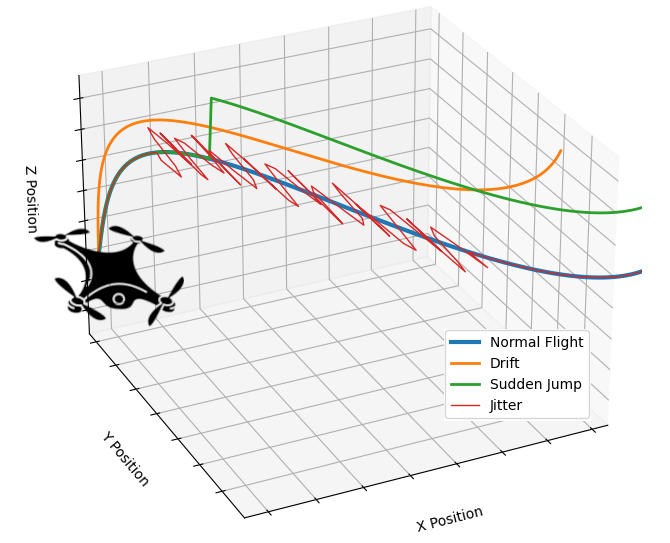
- 该数据集对无人机状态估计异常进行了分类,涵盖机械电气、外部位置、全局位置和高度四个方面。
📝 摘要(中文)
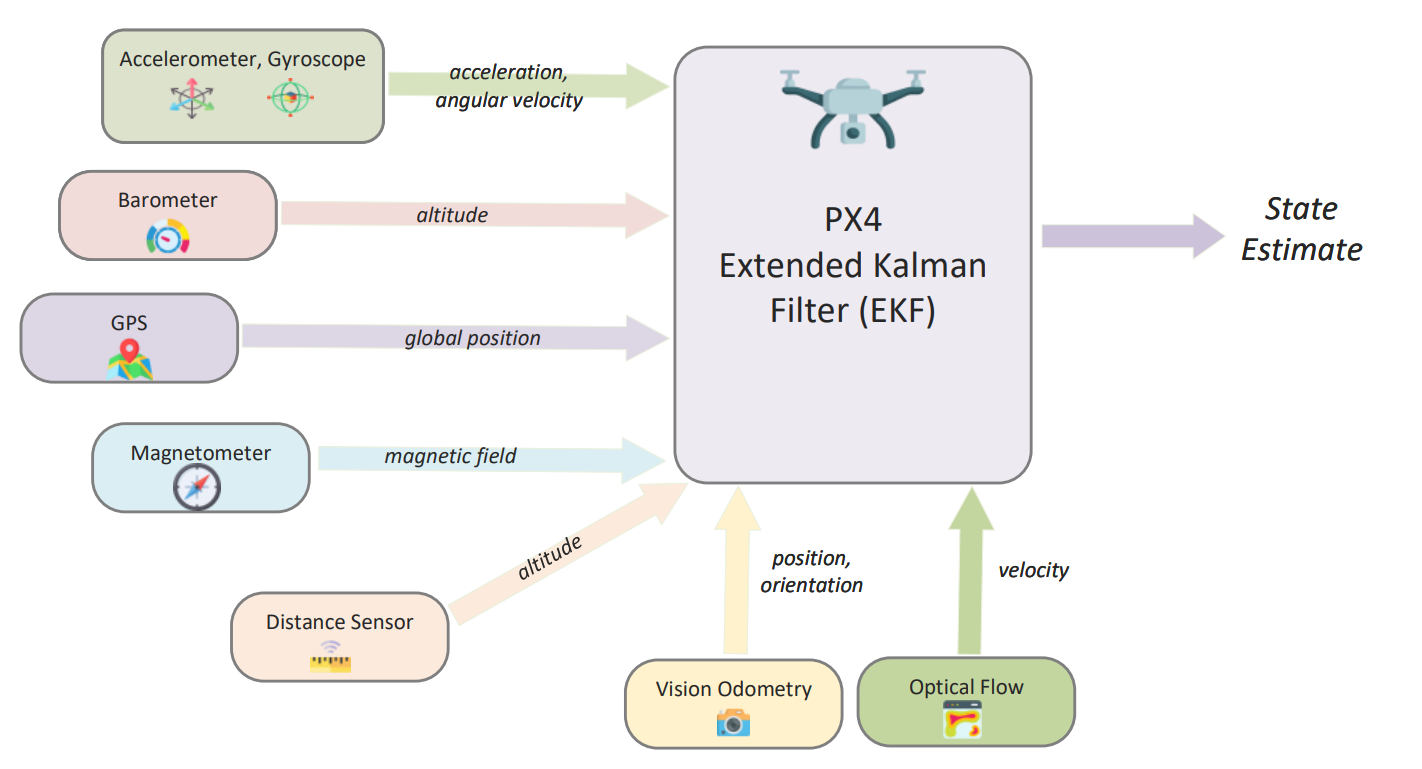
无人机(UAV)中准确的状态估计对于确保可靠和安全运行至关重要。任务执行期间发生的异常可能导致预期和观察到的系统行为之间出现差异,从而危及任务成功或构成潜在的安全隐患。为了及时响应并维持系统可靠性,必须持续监控和检测这些情况。本文关注无人机状态估计异常,并提供大规模真实世界无人机数据集,以促进异常检测的开发研究。与主要依赖于向模拟数据中注入故障的现有数据集不同,该数据集包含1396个真实飞行日志,总计超过52小时的飞行时间,这些数据是在各种室内和室外环境中,使用配备各种传感器配置的基于PX4的无人机收集的。该数据集包含正常和异常飞行,没有经过合成操作,使其非常适合实际的异常检测任务。论文提出了一种结构化分类,将无人机状态估计异常分为四类:机械和电气异常、外部位置异常、全局位置异常和高度异常。这些分类反映了在多变量传感器数据流中观察到的集体异常、上下文异常和离群异常,包括IMU、GPS、气压计、磁力计、距离传感器、视觉里程计和光流,这些都可以在PX4日志记录机制中找到。预计该数据集将在异常检测和隔离系统的开发、训练和评估中发挥关键作用,以解决无人机可靠性研究中的关键差距。
🔬 方法详解
问题定义:无人机状态估计的准确性是安全飞行的关键,但现有异常检测研究缺乏真实世界的数据支持,主要依赖于模拟数据或人工注入的故障,这与实际飞行中遇到的复杂异常情况存在差距。因此,如何获取并利用真实飞行数据进行无人机状态估计异常检测是一个亟待解决的问题。
核心思路:论文的核心思路是构建一个大规模的、包含真实飞行数据的无人机状态估计异常数据集。通过收集真实飞行日志,涵盖各种环境和传感器配置,从而提供更贴近实际情况的异常数据,用于训练和评估异常检测算法。
技术框架:该研究的核心在于数据集的构建和异常分类。首先,使用基于PX4的无人机在各种室内和室外环境中进行飞行,收集飞行日志。然后,对收集到的飞行日志进行分析,识别并标注异常数据。最后,根据异常的类型,将异常分为机械和电气异常、外部位置异常、全局位置异常和高度异常四个类别。数据集包含来自IMU、GPS、气压计、磁力计、距离传感器、视觉里程计和光流等多种传感器的数据。
关键创新:该论文的关键创新在于构建了一个大规模的、真实的无人机状态估计异常数据集,该数据集不依赖于模拟数据或人工注入的故障,而是直接从真实飞行中收集数据,更贴近实际应用场景。此外,论文还对异常进行了分类,为异常检测算法的开发提供了指导。
关键设计:数据集包含1396个真实飞行日志,总计超过52小时的飞行时间。数据来源于配备各种传感器配置的基于PX4的无人机。异常分类基于对多变量传感器数据流的分析,包括IMU、GPS、气压计、磁力计、距离传感器、视觉里程计和光流等。具体参数设置和损失函数取决于后续使用该数据集进行异常检测算法开发的研究。
🖼️ 关键图片

📊 实验亮点
该论文构建的UAV-SEAD数据集包含1396个真实飞行日志,总计超过52小时的飞行时间,涵盖多种室内外环境和传感器配置。与现有数据集相比,UAV-SEAD不依赖于模拟数据或人工注入故障,更贴近实际应用场景,为无人机状态估计异常检测研究提供了宝贵的数据资源。
🎯 应用场景
该研究成果可广泛应用于无人机安全飞行保障领域,例如,可用于开发实时的无人机状态监控系统,及时检测和隔离异常,防止事故发生。此外,该数据集也可用于评估和比较不同的无人机异常检测算法,推动无人机可靠性研究的发展。未来,该数据集可以扩展到更多类型的无人机和飞行环境,进一步提升无人机安全性和可靠性。
📄 摘要(原文)
Accurate state estimation in Unmanned Aerial Vehicles (UAVs) is crucial for ensuring reliable and safe operation, as anomalies occurring during mission execution may induce discrepancies between expected and observed system behaviors, thereby compromising mission success or posing potential safety hazards. It is essential to continuously monitor and detect such conditions in order to ensure a timely response and maintain system reliability. In this work, we focus on UAV state estimation anomalies and provide a large-scale real-world UAV dataset to facilitate research aimed at improving the development of anomaly detection. Unlike existing datasets that primarily rely on injected faults into simulated data, this dataset comprises 1396 real flight logs totaling over 52 hours of flight time, collected across diverse indoor and outdoor environments using a collection of PX4-based UAVs equipped with a variety of sensor configurations. The dataset comprises both normal and anomalous flights without synthetic manipulation, making it uniquely suitable for realistic anomaly detection tasks. A structured classification is proposed that categorizes UAV state estimation anomalies into four classes: mechanical and electrical, external position, global position, and altitude anomalies. These classifications reflect collective, contextual, and outlier anomalies observed in multivariate sensor data streams, including IMU, GPS, barometer, magnetometer, distance sensors, visual odometry, and optical flow, that can be found in the PX4 logging mechanism. It is anticipated that this dataset will play a key role in the development, training, and evaluation of anomaly detection and isolation systems to address the critical gap in UAV reliability research.