How Do We Research Human-Robot Interaction in the Age of Large Language Models? A Systematic Review
作者: Yufeng Wang, Yuan Xu, Anastasia Nikolova, Yuxuan Wang, Jianyu Wang, Chongyang Wang, Xin Tong
分类: cs.RO, cs.HC
发布日期: 2026-02-13
💡 一句话要点
系统性回顾:大型语言模型时代下人机交互研究的现状与未来
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人机交互 大型语言模型 系统性综述 具身智能 用户建模
📋 核心要点
- 现有HRI研究对LLM的人本影响关注不足,难以应对LLM驱动的HRI系统带来的新挑战。
- 通过系统性文献综述,分析LLM在HRI中的应用现状,并识别关键设计考量与挑战。
- 研究揭示LLM重塑了机器人感知、交互生成和与人类需求对齐的方式,但当前研究多为探索性。
📝 摘要(中文)
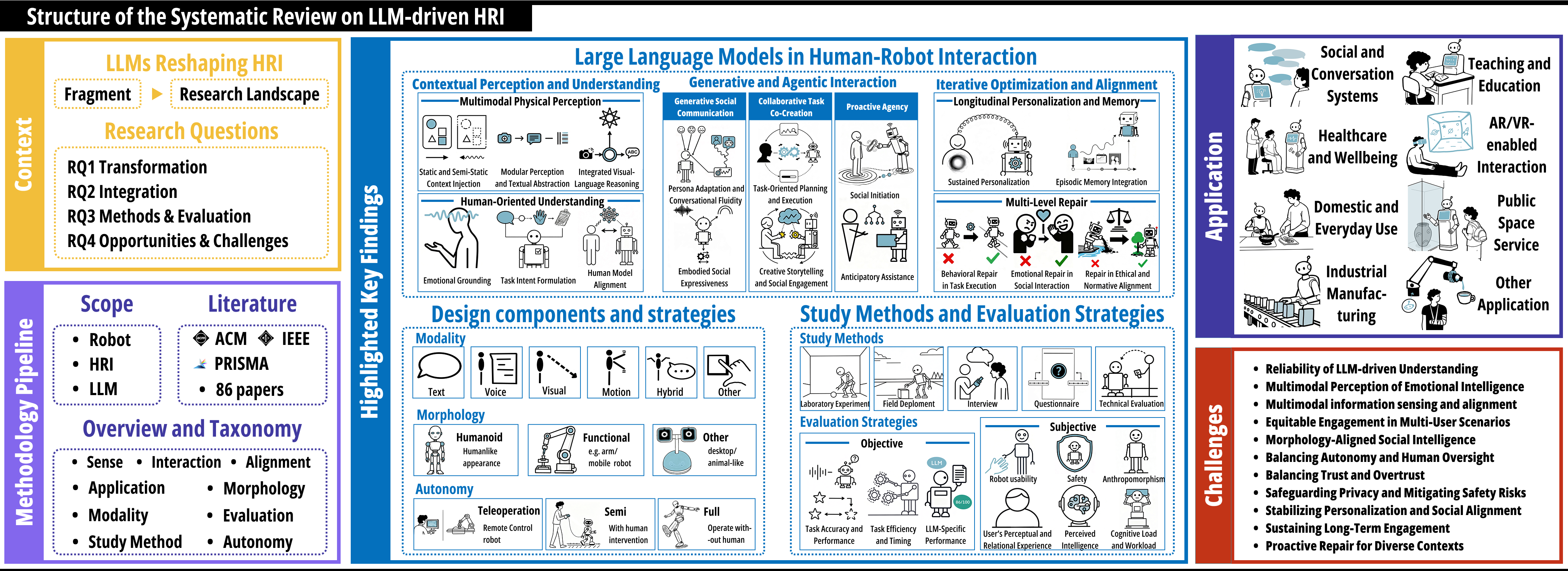
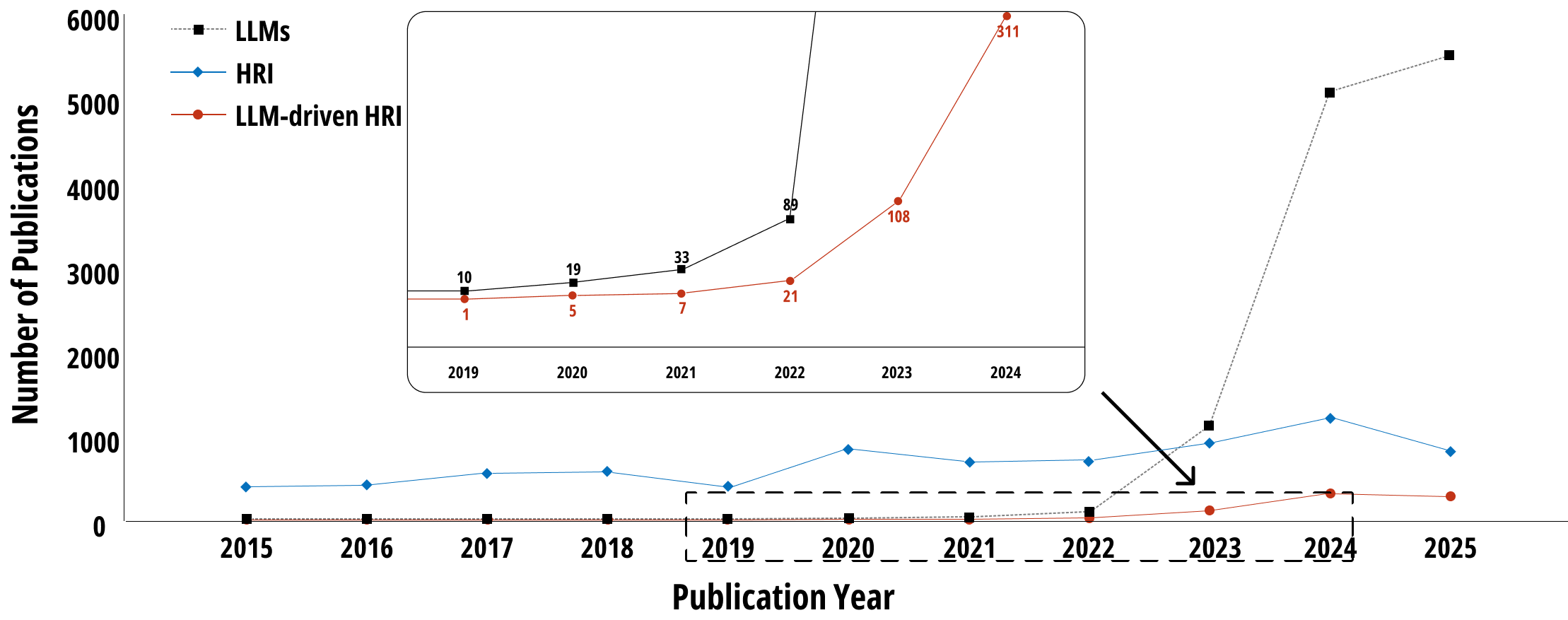
大型语言模型(LLM)的进步正在深刻地重塑人机交互(HRI)领域。虽然先前的工作已经强调了LLM的技术潜力,但很少有研究系统地考察它们以人为中心的的影响(例如,面向人类的理解、用户建模和自主程度),这使得整合LLM驱动的HRI系统中涌现的挑战变得困难。因此,我们遵循PRISMA指南进行了一项系统的文献检索,确定了86篇符合我们纳入标准的文章。我们的研究结果表明:(1)LLM正在通过重塑机器人感知上下文、生成具有社会基础的交互以及在具身环境中与人类需求保持持续一致的方式来改变HRI的基础;(2)当前的研究在很大程度上是探索性的,不同的研究侧重于LLM驱动的HRI的不同方面,导致实验设置、研究方法和评估指标的选择范围广泛。最后,我们确定了关键的设计考虑因素和挑战,为LLM和HRI交叉领域的未来研究提供了一个连贯的概述和指导。
🔬 方法详解
问题定义:现有的人机交互研究在大型语言模型(LLM)快速发展的背景下,面临着如何有效利用LLM来提升人机交互体验的挑战。以往的研究主要关注LLM的技术潜力,而忽略了其在人机交互中以人为本的影响,例如人类理解、用户建模和自主性级别。这导致对LLM驱动的人机交互系统中的新兴挑战缺乏系统性的整合和理解。
核心思路:本研究的核心思路是通过系统性的文献综述,全面分析LLM在人机交互领域的应用现状、关键挑战和设计考虑因素。通过对大量相关文献的梳理和归纳,旨在为未来的研究提供一个连贯的框架和指导,促进LLM与HRI的深度融合。
技术框架:本研究采用PRISMA指南进行系统性文献检索,主要包括以下几个阶段: 1. 明确研究问题和检索范围。 2. 制定文献检索策略,确定关键词和数据库。 3. 筛选文献,根据预设的纳入和排除标准选择相关文献。 4. 对纳入的文献进行数据提取和分析,包括研究方法、实验设置、评估指标等。 5. 综合分析结果,总结LLM在HRI中的应用现状、挑战和设计考虑因素。
关键创新:本研究的关键创新在于对LLM在HRI领域的应用进行了系统性的、以人为本的分析。它不仅关注LLM的技术能力,更关注其对人类用户的影响,例如用户理解、信任和满意度。通过对现有研究的归纳和总结,本研究为未来的研究提供了更全面的视角和更明确的方向。
关键设计:本研究的关键设计在于其严格的文献检索和筛选流程,以及对纳入文献的细致分析。研究者遵循PRISMA指南,确保了文献检索的全面性和系统性。同时,研究者对纳入的文献进行了详细的数据提取和分析,包括研究目标、研究方法、实验设置、评估指标和主要发现。这些数据为研究者提供了深入了解LLM在HRI领域应用现状的基础。
🖼️ 关键图片

📊 实验亮点
该研究通过对86篇相关文献的系统性分析,揭示了LLM正在改变HRI的基础,包括机器人如何感知环境、生成社交互动以及与人类需求保持一致。研究还发现,当前的研究多为探索性,实验设置和评估指标的选择范围广泛。此外,研究还总结了LLM在HRI中应用的关键设计考虑因素和挑战,为未来的研究提供了指导。
🎯 应用场景
该研究成果可应用于多种人机交互场景,例如智能家居、辅助机器人、教育机器人和医疗机器人等。通过更好地理解LLM在HRI中的作用,可以设计出更智能、更人性化的机器人系统,提升用户体验,并解决实际问题。未来的研究可以进一步探索LLM在特定领域的应用,例如情感识别、个性化交互和自主学习。
📄 摘要(原文)
Advances in large language models (LLMs) are profoundly reshaping the field of human-robot interaction (HRI). While prior work has highlighted the technical potential of LLMs, few studies have systematically examined their human-centered impact (e.g., human-oriented understanding, user modeling, and levels of autonomy), making it difficult to consolidate emerging challenges in LLM-driven HRI systems. Therefore, we conducted a systematic literature search following the PRISMA guideline, identifying 86 articles that met our inclusion criteria. Our findings reveal that: (1) LLMs are transforming the fundamentals of HRI by reshaping how robots sense context, generate socially grounded interactions, and maintain continuous alignment with human needs in embodied settings; and (2) current research is largely exploratory, with different studies focusing on different facets of LLM-driven HRI, resulting in wide-ranging choices of experimental setups, study methods, and evaluation metrics. Finally, we identify key design considerations and challenges, offering a coherent overview and guidelines for future research at the intersection of LLMs and HRI.